基于颜色和SURF特征的混合匹配算法研究
2015-02-21李恒年邓计才王招娣
李恒年,邓计才,王招娣
(郑州大学 信息工程学院,河南 郑州 450001)
基于颜色和SURF特征的混合匹配算法研究
李恒年,邓计才,王招娣
(郑州大学 信息工程学院,河南 郑州 450001)
针对传统的SURF算法未使用图像的颜色信息,提出了一种基于颜色信息和SURF特征相结合的混合图像匹配算法,算法通过提取目标图像的颜色信息,从源图像中定位出一个区域,该区域就是目标图像在源图像中的模糊位置,然后以该区域作为感兴趣区域,使用SURF匹配算法实现图像的精确匹配。算法通过颜色信息对待匹配目标预先进行粗定位,减少了图像匹配过程中提取源图像SURF特征的数量,从而减少了匹配时间。仿真实验结果表明,匹配效率明显提高,实时性较好。
颜色;SURF特征;匹配区域;图像匹配
图像匹配是以已知目标图像为模板,在其他图像上找空间上相同的场景的过程,图像匹配算法的可靠性和实时性以及定位精度是衡量匹配算法的主要性能指标。目前常用的图像匹配算法主要分为基于像素信息的匹配算法以及基于特征信息的匹配算法[1-2]。
基于像素的图像匹配法是最早发展起来的匹配算法,由于对整幅图像的灰度值进行处理,所以运算复杂,匹配效率较低。其原理是分别统计源图像和目标图像各点的灰度值,通过某种相似原则进行匹配,获得最佳匹配点。该算法由于是基于图像各点像素值的匹配算法,所以对其图像的质量要要求较高,图像的噪声对该匹配算法的稳定性影响较大。另一个关键因素就是相似度量函数的选取,其直接影响匹配的稳定性和可靠性,其常见的相似度量算法有:归一化积相关匹配算法(NPROD)[3]、序列相似性匹配算法(SSDA)[4]、二维投影匹配算法、傅里叶分析法等。
基于特征信息的匹配算法是近年来较为热门的算法,它主要是通过提取图像中独特的特征来代表整幅图像,这样可以减小运算量,并且减少了噪声对匹配结果的影响,具有较强的稳定性。该算法中,常用的特征有骨架特征[5]、轮廓特征[6]、角点[7]、边缘点等明显独特的特征。最早的特征匹配算法主要采用图像的全局特征,匹配精度较低。随着算法的发展,现在常用的特征匹配算法有Harris角点检测算法[8]、SIFT(Scaleinvariant feature transform)算法[9]、SURF(Speeded Up Robust Features)算法[10]等。
在现阶段的匹配算法中,SURF算法属于较为热门的匹配算法之一,但其算法未考虑图像的颜色的信息,如果在图像匹配中加入颜色信息,那么将会大大提高图像匹配的效率。
1 基于颜色的目标预定位
1.1 颜色空间
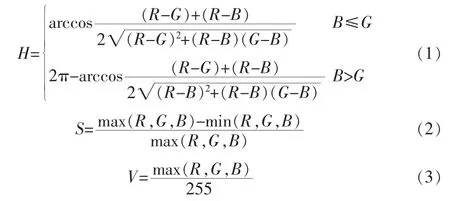
颜色空间[11]是指一种图像颜色信息表示的方法,它将颜色特征用数学表达式来表示,便于对图像颜色信息的显示及处理。常用的颜色空间模型有RGB空间、HSV空间、YUV空间、CMY空间等。在HSV空间模型中,H表示图像的颜色,S表示图像的饱和度,V表示图像的亮度,其颜色模型如图1所示。
通常情况下,彩色图像的显示使用RGB颜色模型,但是在图像处理过程中,RGB颜色模型下不容易对其进行颜色特征的处理,其颜色信息没有明显的规律可言,很难提取图像的颜色特征;而在HSV颜色模型下,颜色特征更容易提取,并且可以剔除亮度对图像的影响。RGB空间转换HSV空间的公式如下。

图1 HSV颜色模型Fig.1 HSV color model
1.2 基于HSV颜色空间的目标定位
该算法首先需要提取目标图像的颜色信息,通过这个颜色信息在源图像中寻找与该颜色相同或相近的区域,然后把此区域作为目标的匹配区域。本文通过对目标图像的颜色信息进行统计,取用目标图像出现最多的颜色作为目标图像的颜色信息,进行目标区域定位。
由于一般的彩色图像都是RGB空间模型的图像,因此首先把目标图像从RGB空间转化到HSV空间,然后对目标图像作颜色直方图[12]统计,根据统计结果得到一颜色值(该颜色值为目标图像中出现次数最多的);把这个颜色值作为参数对源图像进行二值化。二值化是对源图像3个通道的分量分别进行某一范围灰度值的检测,把灰度值在这一范围内的区域设为白色,其他区域设为黑色。本文实验所使用的源图像如图2所示,其中左边的动物作为匹配的目标所得的结果如图3所示。

图2 源图像Fig.2 The source image

图3 实验结果Fig.3 The experimental results
对源图像二值化后,图像会出现一些噪点,容易对下一步确定白色区域位置产生影响,所以本文采用了形态学的腐蚀和膨胀处理,消除单个白色噪声点。形态学图像处理是在图像中移动一个结构元素,然后将结构元素与下面的二值图像进行交、并等集合运算;先腐蚀后膨胀的过程称为开运算。它具有消除细小物体,在纤细处分离物体和平滑较大物体边界的作用。对图像进行开运算,可以有效的消除噪声点;最后通过对源图像进行逐个像素点的遍历,找到白色区域的中心位置坐标,进行目标区域定位。目标区域定位由两个因素决定,一是目标区域必须覆盖所有白色区域,二是目标区域必须大于目标图像尺寸。
2 基于颜色和SURF的匹配算法
2.1 SURF算法
SURF算法[10]是一种稳健的局部特征点描述算法,它是在SIFT描述子的基础上改进而提出来的,由于SIFT算法获取的特征点数量太大,使得算法计算复杂度高,后来Bay[10]等人又做了新的改进,通过对SIFT描述子降维处理及引入了积分图像、箱式滤波器、和高速Hessian矩阵检测特征值等概念,提出了SURF算法,该算法对图像的旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换及噪声也保持一定程度的稳定性。基于SURF特征点的图像匹配算法一般流程如图4所示。

图4 SURF算法流程图Fig.4 The flow diagram of SURF algorithm
2.2 基于颜色信息的匹配算法改进
SURF算法是对整幅源图像进行特征点检测并提取,而实际上,该方法提取的特征点是冗余的,这样导致了运算量的浪费,从而增加了特征点提取与匹配所需的时间。本文提出了一种基于颜色信息的改进算法,该算法通过颜色信息进行预定位的方法可以有效地减少提取特征点的数量。该算法实现流程图如图5所示。
3 算法实验结果及分析
本文仿真实验使用vs2008平台与opencv2.3.1计算机视觉函数库结合并由C++代码编程实现。为测试本文匹配算法的性能指标(匹配精度和匹配效率),实验对不同图像分别进行匹配精度和匹配时间的测试。根据仿真实验得到实验结果图6及匹配时间表1。图6中较大方框是通过提取目标图像颜色信息而确定的目标模糊位置,从不同图像的实验
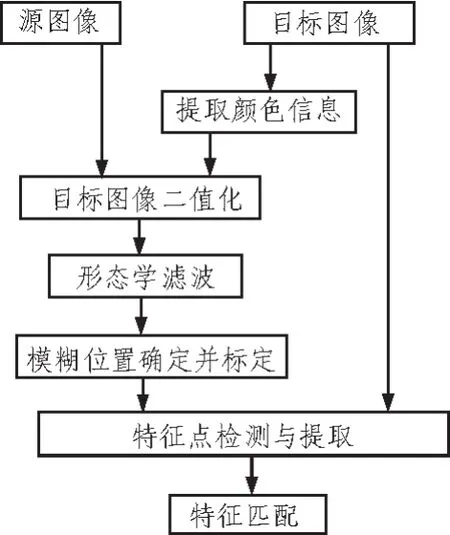
图5 改进算法流程图Fig.5 The flow diagram of improved SURF algorithm
结果可以看出,该方框大小不一,此区域的大小依赖于图像颜色信息复杂程度,颜色信息单一,区域会很小,颜色信息多样,区域就会较大;并且,该方框都能正确标定出目标的位置,可以保证图像匹配的正确性。图中较小方框表示在预定位区域内使用SURF算法进行匹配的精确定位结果。对于形状相似,颜色不同的目标,算法可以在一定程度上减小误配率。表1显示分别使用本文的改进算法和单一的SURF算法进行实验所需匹配时间,从整体来看,本文算法较单一SURF算法在匹配效率上有很大提高;结合图6所示结果,匹配时间与基于颜色预定位的区域大小直接相关,也就是说本文匹配算法的实时性能依赖于颜色信息的复杂程度,但较于单一的SURF算法,本文算法实时性有所提高。

图6 改进算法仿真实验结果Fig.6 Improved algorithm experimental results

表1 匹配时间对比Tab.1 The matching time contrast
4 结束语
文中提出了一种基于颜色信息和SURF特征相结合的图像匹配算法,该算法通过目标的颜色信息进行预定位,确定了目标在源图像中的模糊区域;在此范围内进行SURF特征提取与特征匹配,这样可以减少提取SURF特征点的数量,从而提高匹配效率。通过实验结果分析得出,该算法缩短了匹配时间,但是算法只是提取单一的颜色信息,提高匹配速率的同时,也存在了一定的局限性。匹配效率的提高幅度依赖于图像中颜色信息的复杂程度。此算法也可用于视频目标的跟踪,颜色信息可以通过手动选取,实时性更好。
[1]Barbara Zitova.Jan Flusser.Image registration methods:a survey[J].Image and Vision Computing,2003,21(11):977-1000.
[2]NI Guo-qiang,LIU Qiong.Analysis and prospect of multisource image registration techniques[J].Opto-Electronic Engineering,2004,31(9):1-6.
[3]Brown L.G A survey of image registration techniques[J].ACM Computing Surveys,1992,24(4):325-376.
[4]Barnea,Daniel I.A class of algorithm for fast digital image registration[J].IEEE Trans Compute,1972,C-21(2):176-186.
[5]HU Tao,GUO Bao-ping.Contour feature based on image registration[J].Opto-Electronic,2009(11):118-122.
[6]史思琦.基于轮廓特征的目标识别研究[D].西安:西安电子科技大学,2012.
[7]Jian J,Bo L.An effective method for corner detection: Control,Automation and Systems (ICCAS),2013 13th International Conference on,Gwangju,2013:20-23.
[8]Zhiyong Y,Yijian P,Jihong S.An Adaptive Algorithm for Harris Corner Detection:Computational Intelligence and Software Engineering[C]//2009.CiSE 2009.International Conference on,Wuhan,2009:11-13.
[9]Lowe D G.Distinctive image features from scale-invariant ieypoints[J].International Journal of Computer Vision,2004, 60(2):91-110.
[10]Bay H,Ess A,Tuytelaars T,et al.Speeded up robust features[J].Computer Vision and Image Understanding,2008, 110(3):346-359.
[11]Lissner I,Urban P.Toward a unified color space for perception-Based Image Processing[J].Image Processing, IEEE Transactions on,2012,21(3):1153-1168.
[12]HUANG Wen-bei,HE Liang,GU Jun-zhong.Content-based image retrieval using color histogram[J].Journal of DongHua University,2006(4):98-102.
The research of matching algorithm based on color and SURF features
LI Heng-nian,DENG Ji-cai,WANG Zhao-di
(School of Information Engineering,Zhengzhou University,Zhengzhou 450001,China)
Considering the traditional SURF algorithm without color information.This paper presents an image matching algorithm based on a combination of color and SURF features.The algorithm can determine an area of the source image by extracting the color information from the target image.The target must be in this area of source image.Then We can use SURF matching algorithm for image matching in this area.The size of matching region will be reduced.The time of image matching will be reduced according to the experiment.
color;SURF features;matching region;image matching
TN911.73
:A
:1674-6236(2015)18-0077-03
2014-12-23稿件编号:201412217
李恒年(1989—),男,河南南阳人,硕士研究生。研究方向:图像处理,嵌入式系统。
