客车绊倒侧翻预警及DB+AFS集成控制研究
2015-02-19谢伟东郑志谊付志军
谢伟东,郑志谊,付志军
(浙江工业大学 机械工程学院,浙江 杭州 310014)
客车绊倒侧翻预警及DB+AFS集成控制研究
谢伟东,郑志谊,付志军
(浙江工业大学 机械工程学院,浙江 杭州 310014)
摘要:针对传统侧翻预警系统存在的只能预测因急转弯时侧向加速度过大引起的非绊倒性侧翻而无法预测因道路凹凸不平引起的绊倒性侧翻的缺陷,研究了汽车遭遇各种复杂工况及突发事件时的失稳机理,构建了客车绊倒侧翻模型,提出了一种能应对路面垂向不确定性激励的侧翻预警机制,设计了客车绊倒侧翻指标观测器.分析比较了DB,AFS,AS这三种常用的防侧翻执行机制的优缺点,结合经典控制算法PID反馈原理加上DB+AFS集成控制策略设计了客车绊倒性侧翻控制器.通过汽车行业标准软件TruckSim和系统仿真软件MATLAB/Simulink对侧翻指标观测器和防侧翻控制器进行联合仿真,表明所设计的客车绊倒性侧翻预警与控制系统能准确预测到客车侧翻失稳时机并实施有效的控制防止客车侧翻.
关键词:客车侧翻;绊倒侧翻;侧翻指标;防侧翻
Bus rollover warning and DB+AFS integrated control research
XIE Weidong, ZHENG Zhiyi, FU Zhijun
(College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310014, China)
Abstract:A traditional rollover index can detect only untripped rollovers those happen due to high lateral acceleration from sharp turns, it cannot detect tripped rollovers those happen due to tripping from external inputs such as forces when a vehicle strikes a curb or a road bump. For this defect, researching instability mechanism of bus in a variety of complex conditions, based on the tripped rollover bus model, designing a rollover index observer which is effective for tripped rollovers. DB+AFS integration mechanism with PID algorithm are chosen as the control strategy of the anti-rollover controller. A co-simulation for the rollover index observer and the anti-rollover controller by TruckSim(a commercial software) and MATLAB/Simulink is performed, the results show that, this rollover warning and control system can accurately detect bus instability occasion and implement effective control to prevent bus rollover.
Keywords:bus rollover; tripped rollover; rollover index; anti-rollover
频发的客车侧翻事故已对交通安全构成严重威胁,研发客车侧翻预警及控制系统意义重大.目前,虽然一些汽车制造商已经开发出各自的汽车侧翻预警和控制系统,但都是基于汽车非绊倒性侧翻[1].明尼苏达大学Rajamani教授及其学生Phanomchoeng设计出了基于有界雅可比方法的非线性系统状态观测器[2]以及传感器融合算法与非线性系统动力学相结合的侧翻指标观测器[3],实现了对汽车侧翻指标的准确观测,并系统介绍了汽车动力学模型建立及各种汽车稳定性控制方法[4];Kröninger等设计了一种新的绊倒性侧翻感知算法,并提出了主动和被动安全系统相结合的构架实现了对该算法的验证[5];Nalecz等提出了一种绊倒性侧翻测试和结果分析方法,测试结果验证了ABS和TCS(牵引力控制系统)能有效降低汽车侧翻风险[6];Hughes等提出了一种新的汽车绊倒性侧翻动力学特性测试流程[7];刘利等基于滑模理论提出了一种针对不确定非线性系统的变结构重复控制方法[8];李敏采用MATLAB/Simulink仿真技术,提出了MATLAB仿真与实验相结合的过程控制模式,解决了仿真与实验脱离的问题[9].
防侧翻控制技术主要包括差动制动(DB)、主动前轮转向(AFS)和主动悬架(AS)[10].其中,差动制动通过降低汽车横摆角速度和车速达到防侧翻的效果[11],其缺点是所能提供的制动力受轮胎垂向载荷和路面附着系数的限制,在低附着路面或轮胎接地载荷较小时控制效果不佳.主动前轮转向是通过施加一个附加前轮转角来提高汽车的操纵性和稳定性,AFS主要在轮胎线性范围内控制前轮的转角来改善汽车的操纵稳定性[12],但过多的转向易使汽车偏离原来的行驶轨迹.主动悬架是通过实时改变悬架的刚度和阻尼产生附加力矩控制车辆的侧倾运动,从而稳定车辆,但在客车上换装主动悬架成本较高,技术难度较大,实车应用可能性较低.综合考虑这三种防侧翻执行机制的优缺点,选择差动制动和主动前轮转向相结合的方式作为防侧翻控制器的执行机制.采用经典的PID算法,选择TruckSim与MATLAB/Simuink作为仿真平台,设计侧翻预警及控制系统并验证其有效性.
1系统建模
为准确获得客车绊倒性与非绊倒性侧翻指标,将客车简化成图1所示的5DOF模型.其中,簧载质量垂向动力学与侧倾动力学方程为
(1)

msayhRcosΦs-kΦs
(2)
式中:ms为簧载质量;zs为簧载质量垂向位移;Fsl,Fsr分别为左、右悬架形变力;Is为簧载质量转动惯量;Φs为簧载质量侧倾角;ls为左、右悬架间距;hR
为簧载质量质心到侧倾中心的距离;ay为汽车侧向加速度;k为簧载质量侧倾刚度.

图1 5DOF客车模型Fig.1 5DOF bus model
由式(1,2)可得左、右悬架形变力的关系为
(3)
msghRsinΦs+kΦs]
(4)
非簧载质量垂向动力学与侧倾动力学方程为
(5)

(6)
式中:mu为非簧载质量;zu为非簧载质量垂向位移;Ftl,Ftr分别为左、右车轮受地面垂向荷;Iu为非簧载质量转动惯量;Φu为非簧载质量侧倾角;rt为车轮滚动半径;t为轮距.
由式(5,6)可得车辆受两侧路面的垂向载荷关系为
(7)

(ms+mu)ayrt]
(8)
关于侧翻指标,很多学者给出了不同的定义,但都从同一个基本模型中衍生出来,即
(9)
式中:R为侧翻指数.当R=±1时,代表一侧车轮离地,认为汽车将发生侧翻;汽车在平直路面上直线行驶时R=0.
根据式(3,4,7~9)可得侧翻指标为
(10)
2侧翻指标仿真验证
在MATLAB/Simulink中搭建出系统模型,与TruckSim进行联合仿真,验证侧翻指标的可靠性.仿真时车辆参数见表1.

表1 TruckSim车辆参数配置
注:1) 前、后轴额定载荷分别为5.5 t和10 t的非独立悬架客车.
仿真1车速为90 km/h,道路附着系数为0.8,方向盘转角输入见图2,仿真结果见图3(图中实际值由TruckSim输出).由图3可以看出,侧翻指标观测曲线可以很好的跟踪真实值曲线.这证明了所设计的侧翻指标观测算法可以有效预测客车非绊倒性侧翻.
仿真2车速为90 km/h,道路附着系数为0.8,方向盘转角恒为100°,给右侧车轮0.1 m的路面激励,仿真结果见图4.仿真结果显示侧翻指标观测值曲线非常接近真实值曲线.证明该侧翻指标观测算法可以有效预测客车绊倒性侧翻.

图2 方向盘转角Fig.2 Steering wheel angle

图3 侧翻指标Fig.3 Rollover index
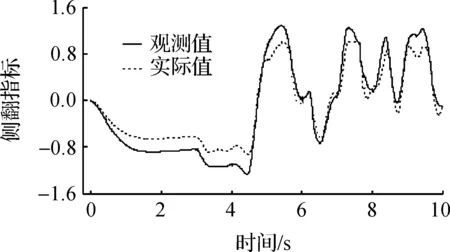
图4 侧翻指标Fig.4 Rollover index
3防侧翻控制算法
由式(10)得知:减小汽车的侧向加速度可以防止汽车侧翻,选择侧向加速度作为控制变量.为研究防侧翻机理,将客车简化为图5所示的3DOF模型,侧向加速度与横摆角速度存在的关系式为
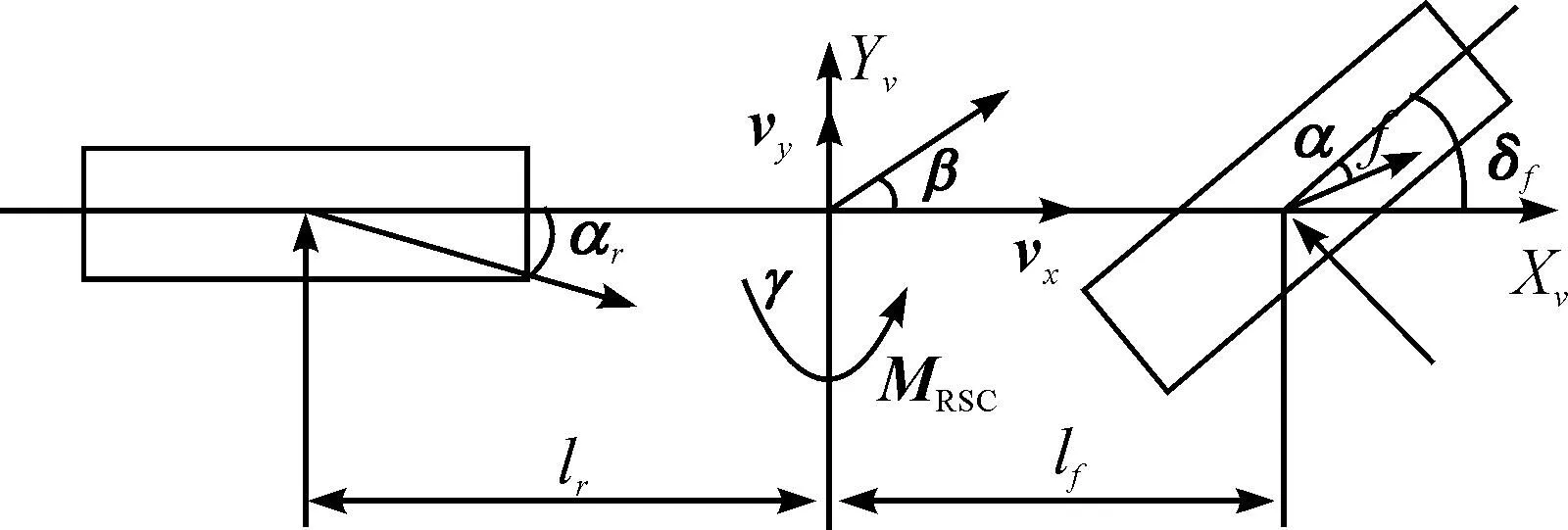
图5 3DOF客车模型Fig.5 3DOF bus model
(11)
式中:vy为车辆侧向速度;γ为横摆角速度;β为质心侧偏角.
采用差动制动和主动前轮转向联合防侧翻机制,当汽车有侧翻倾向时,控制汽车前轮转角和各车轮制动力产生附加横摆力矩保证汽车稳定行驶.控制系统总体构架如图6所示.
当侧翻指标R增大到阈值时,即启动防侧翻控制器,设定阈值Rd=0.8,根据式(10)可得目标值Rd与期望的侧向加速度ayd的关系式为
(12)
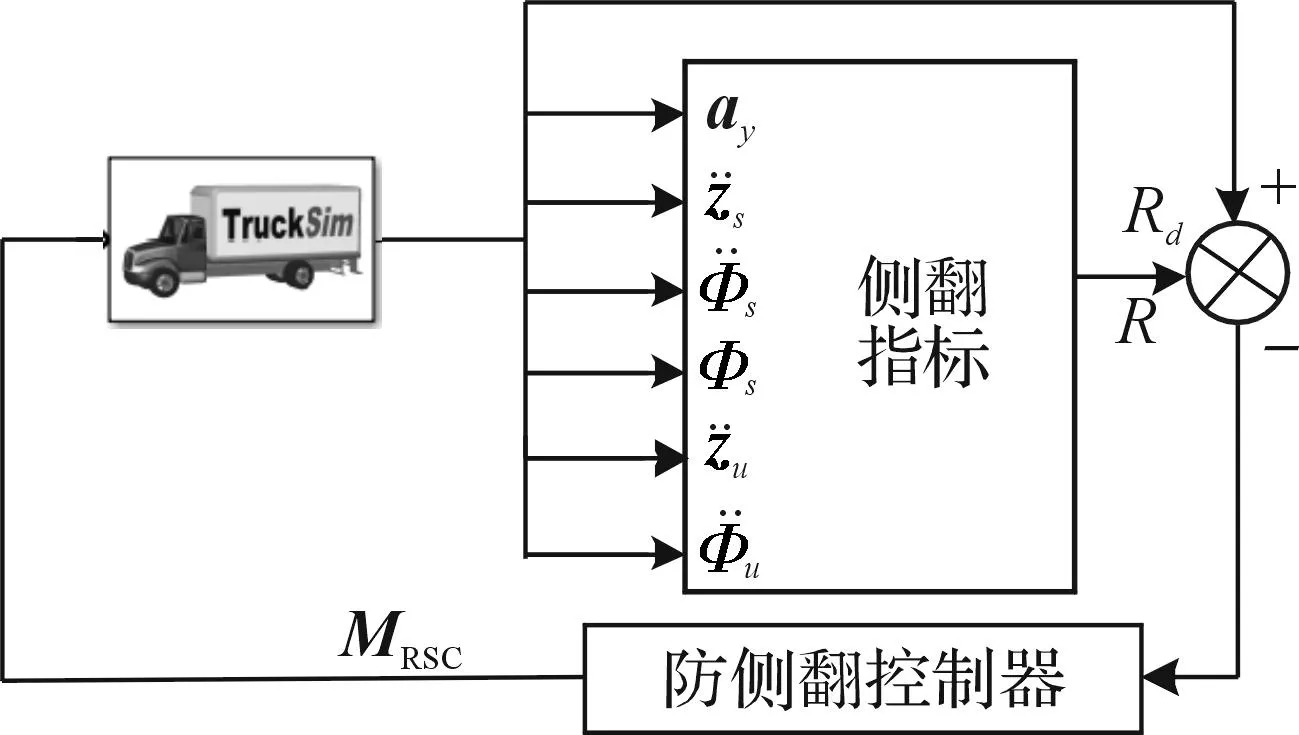
图6 防侧翻控制系统框图Fig.6 The block diagram of anti-rollover control system
汽车质心在Yv轴上绝对分量为
(13)
式中vx为汽车纵向速度.
根据式(13)得到横摆角速度期望值为
根据图5所示的车辆横摆动力学模型,增加了横摆力矩MRSC的汽车横摆力矩平衡方程为
式中:Iz横摆转动惯量;lf,lr分别为前、后轴到质心的距离;Fyf,Fyr后分别为前、后轴轮胎侧偏力.
MRSC由差动制动和主动前轮转向共同产生.横摆角速度误差为
e=γ-γd
设计PID反馈控制输入为
(14)
式中:c为权重系数;kf为轮胎侧偏刚度;Δδf为附加前轮转角;bflbf为制动时产生的横摆力矩.
为使差动制动产生足够的附加横摆力矩,分析差动制动的制动力在各车轮上的分配.Yamamoto等[13]的研究表明:当车辆向左转向时,单独制动内前轮,产生附加横摆转矩使侧向加速度迅速增大,增加了车辆侧翻危险性;对外后轮单独制动时,先产生延阻车辆侧翻的正矫正力矩,后变为加剧侧翻的负矫正力矩;单独制动外前轮时,一直产生正矫正力矩,防侧翻效果非常明显;而单独制动内后轮时,只产生负矫正力矩,进一步加剧了车辆侧翻趋势.显然,单独制动外前轮时,防侧翻效果最佳,故采用对车辆外前轮制动力进行单独控制的方法实现差动制动产生附加横摆力矩防止车辆侧翻.
权重系数c决定了附加横摆力矩的分配,只有合理分配附加横摆转矩才能更好发挥两者集成控制的优势.重庆大学国家重点实验室和韩国Inha大学的Lu等[14]对差动制动与主动前轮转向的防侧翻效能作了研究,表明在一定条件下主动前轮转向比差动制动防侧翻效果更好,而差动制动的控制域更大,主动前轮转向作为一种新的防侧翻技术还处于理论研究阶段,而差动制动技术已进入实车应用阶段,技术更为成熟;而且差动制动技术在产生附加横摆转矩的同时降低车辆行驶速度,这是主动前轮转向技术不能比拟的优势.
一般汽车前轮转角的范围为0~0.5rad,为了不对汽车行驶轨迹产生很大影响,设置主动前轮转向控制范围在0~0.1rad,选取主动前轮转向控制域为前轮转角的10%.此时,根据式(14)就可以确定权重系数c.
4控制算法仿真验证
仿真3在TruckSim中设置车速为90km/h,路面附着系数为0.8,方向盘转角从0°突然转到400°,模拟车辆高速时瞬态转向工况.仿真结果见图7.从图7可以看出:在车辆临近非绊倒性侧翻(路面垂向激励为0)时,采用差动制动和主动前轮转向集成控制,车辆侧翻指标很快趋于稳定,其控制效果要明显优于差动制动或主动前轮转向单独控制时的效果.

图7 侧翻指标Fig.7 Rollover index

图8 侧翻指标Fig.8 Rollover index
仿真4在TruckSim中设置车速为90km/h,路面附着系数为0.8,方向盘转角从0°突然转到100°,给右侧车轮0.1m的路面激励,模拟车辆高速时瞬态转向工况下遭遇路面干扰.仿真结果见图8.从图8可以看出:车辆在高速转弯并受到路面垂向激励工况下,差动制动和主动前轮转向集成控制能将侧翻指标控制在预设的安全阈值之内(<0.8),而单独控制时,无论是差动制动还是主动前轮转向,车辆侧翻指标仍然会接近极限值(±1).这证明了差动制动和主动转向集成控制能有效防止车辆发生绊倒性侧翻.
在上述两种工况下,观察车辆在开环(未加控制)、单一控制模式或集成控制模式下侧翻指标曲线的变化情况可以看出:采用DB+AFS集成控制算法的防侧翻效果具有明显的优势,而且在客车上实现DB+AFS集成控制有一定的硬件支持,可行性很高.
5结论
在分析了当前国内外关于汽车绊倒性侧翻预测研究现状的基础上,根据客车侧倾时的动力学特性建立了5DOF绊倒性侧翻模型,重点考虑了悬架对客车侧倾的影响,并将外界不确定性激励作为系统建模的一部分,基于该模型设计了能同时预测客车非绊倒性侧翻与绊倒性侧翻的侧翻指标观测算法;介绍了几种常用的汽车防侧翻控制机制的机理,分析比较了这几种防侧翻机制在各种行驶工况中发挥的作用,设计了一种基于PID算法的DB和AFS相结合的客车侧翻控制系统,在客车侧翻指标达到或超过预设的安全阈值时,启动DB+AFS集成侧翻控制系统对客车实施控制,防止客车侧翻.运用专业的汽车动力学仿真软件TruckSim及虚拟系统分析平台MATLAB/Simulink进行联合仿真,仿真结果显示:所设计的客车侧翻指标观测算法及DB+AFS防侧翻集成控制策略能准确预测到客车侧翻时机并对车辆实施有效控制,防止客车侧翻.此外,该侧翻指标观测思想对其他类型车辆有一定借鉴意义.
参考文献:
[1]RAJAMANIR,PHANOMCHOENGG.Predictionandpreventionoftrippedrollovers[R].Minnesota:DepartmentofMechanicalEngineeringUniversityofMinnesota,2012.
[2]RAJAMANIR,PHANOMCHOENGG.State,parameter,andunknowninputestimationproblemsinactiveautomotivesafetyapplications[D].Minnesota:TheFacultyofTheGraduateSchooloftheUniversityofMinnesota,2011.
[3]RAJAMANIR,PIYABONGKARND,TSOURAPASV,etal.Parameterandstateestimationinvehiclerolldynamics[J].IEEETransactionsonIntelligentTransportationSystemsJournal,2011,12(4):1558-1566.
[4]RAJAMANIR.Vehicledynamicsandcontrol[M].SecondEdition.Minnesota:Springer-Verlag,2012.
[5]KRÖNINGERM,LAHMANNR,LICHT,etal.Anewsensingconceptfortrippedrollovers[C]//InternationalWorldCongress.Detroit:SAE,2004.
[6]NALECZA,LUZ.Methodologyfortrippedvehiclerollovertestingandanalysisofexperimentalresults[C]//InternationalCongress&Exposition.Detroit:SAE,1994.
[7]HUGHESR,LEWISL,HAREB,etal.Adynamictestprocedureforevaluationoftrippedrollovercrashes[C]//InternationalWorldCongress.Detroit:SAE,2002.
[8]刘利,孙明轩,朱胜.不确定非线性系统的变结构重复控制[J].浙江工业大学学报,2010,38(3):257-262.
[9]李敏.真实模型Matlab仿真的过程控制系统实验研究[J].浙江工业大学学报,2011,39(2):168-173.
[10]张金柱.基于GPS的汽车稳定性控制系统研究[D].哈尔滨:哈尔滨工程大学动力机械及工程系,2012.
[11]朱天军.基于改进TTR重型车辆侧翻预警及多目标稳定性控制算法研究[D].长春:吉林大学汽车工程系,2010.
[12]王宇,董辉,徐建明,等.一种新的智能小车控制策略[J].浙江工业大学学报,2012,40(2):217-221.
[13]YAMAMOTOM,KOIBUCHIK,FUKADAY.Vehiclestabilitycontrolinlimitcorneringbyactivebrake[J].JSAEReview,1995,16(3):323.
[14]LUS,LIY.Contributionofchassiskeysubsystemstorolloverstabilitycontrol[J].ProceedingsoftheInstitutionofMechanicalEngineersPartD:JournalAutomobileEngineering,2012,226(D4):479-493.
(责任编辑:刘岩)
中图分类号:U461.6
文献标志码:A
文章编号:1006-4303(2015)03-0246-05
作者简介:谢伟东(1962—),男,浙江玉环人,教授,研究方向为汽车动力学与控制技术, E-mail:xwd@zjut.edu.cn.
基金项目:国家自然科学基金资助项目(51405436);浙江省公益性项目(2014C31101)
收稿日期:2015-01-15
