开敞式码头系靠泊网络化实时监控系统数据传输方法
2015-02-18邱占芝王伟健
隋 多,邱占芝,王伟健
(大连交通大学 软件学院,辽宁 大连 116000)*
0 引言
进入21世纪以来,海上运输业的蓬勃发展导致港口海岸线资源日益紧张,建设开敞式码头已经成为解决港口海岸线资源消耗殆尽的必然趋势.然而,开敞式码头直面海洋,系靠泊作业环境恶劣,风、海浪、潮流等环境动力要素,对系靠作业安全构成极大的威胁.在过大的风浪流作用下,船舶运动幅度将加剧,极易造成系泊缆力超限,造成断缆事故发生.2006年7月15日,发生在大连30万吨级进口原油码头的原油船“伟大联盟”的断缆漂流搁浅事故险些造成27万吨进口原油的泄漏[1].为此,亟待建立大型开敞式码头系靠泊网络化实时监控系统,以便保证系靠泊作业安全,提高系靠泊作业效率.本文针对开敞式码头系靠泊网络化监控系统的运行需求,研究系统不同监测对象的数据传输方法,给出系统组网模式、网络系统体系结构,以及数据传输技术与处理流程,并通过系统模拟验证提出方法的有效性.
1 需求与监控目标分析
船舶大型化与码头深水化的发展使得码头越来越多的建设在外海开敞区域,合理的布缆方式与恰当的护舷保护有助于系泊船舶对外海自然条件的抵御与适应.开敞式码头的平面布局方式一般分为四种:常规的开敞式泊位、“蝶”形的开敞式泊位、浮筒系泊的开敞式泊位、多方位的开敞式泊位[2].在我国一般多采用“蝶”形开敞式泊位(如图1所示为蝶形码头泊位系缆示意图).
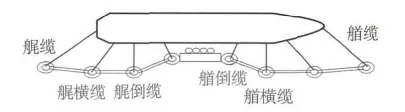
图1 蝶形码头泊位系缆示意图
由于受到自然因素包括海风、海浪、海流的共同作用,系泊船舶会产生不可抗拒的六自由度复合运动,这六个自由度分别是横移(sway)、纵移(surge)、升沉(heave)、横摇(roll)、纵摇(pitch)、回转(yaw)[3].强复合运动会导致缆绳张力过大而发生崩断,之后缆力重新分配作用于剩余缆绳而使其悉数断裂,因此监控系统要保证对上述六自由度进行实时监测.监控系统还要能准确地获取系泊船舶的基本信息(如船舶名称、船舶编号、排水量、泊位编号、国籍、进离港日期等).实时视频监测模块也是船舶监控系统的重要组成部分,它采用数字化和网络化的多角度进行动态实时视频监测,更直观更快捷地掌握船舶系泊情况.
经上述分析并结合用户实际需求,监控系统主要传输数据分为以下四大类:
(1)船舶静态属性(船舶名称、船舶编号、排水量、泊位编号、国籍等);
(2)船舶动态属性(缆绳张力、护舷压力、横移、纵移、升沉、横摇、纵摇、回转等);
(3)海洋环境信息(风向、风速、流向、流速、浪高等);
(4)视频监测信息.
基于上述监测对象的传输需求,整个开敞式码头系靠泊网络化实时监控系统被分成三层结构:监控层、网关层、网络层.其监控层由CAN总线和CDMA2000 1X网络担当,网关层则由对应的CAN/Ethernet网关和PDSN网关组成,而上位机网络层由以太网Ethernet来搭建.缆绳张力与护舷压力的底层采集模块通过CAN总线网络的数据传输与CAN/Ethernet网关的转换功能,将采集数据实时传输至基于以太网的上位机网络中;船舶静态属性、部分船舶动态属性、海洋环境信息、视频监测信息则利用目前流行的移动通信网下的3G网络CDMA2000 1X与PDSN网关进行数据的传输.据此,开敞式码头系靠泊网络化实时监控系统的数据传输网络体系结构如下图2所示.

图2 数据传输网络体系结构
2 数据传输方法
开敞式码头系靠泊网络化实时监控系统采用两种数据传输方法:CAN总线——以太网Ethernet传输和CDMA2000 1X——以太网 Ethernet传输.其中,前者主要涉及缆力与护舷压力的数据传输,而其余监控对象的数据传输均采用后者.
2.1 缆力与护舷压力的数据传输
缆力与护舷压力的数据传输方案:电阻应变式传感器[4]采集的实时数据,通过 CAN发送模块,将数据以CAN数据帧格式进行总线传输,使之到达CAN/Ethernet网关,CAN数据帧利用网关,转换成为以太网帧,最终通过以太网传输到达上位机系统.缆力与护舷压力的数据传输,应具有高实时性、高可靠性,因此系统采用当今主流CAN总线(ControllerAreaNetwork)作为监控底层网络.CAN现场总线技术广泛应用于工业生产、航海工程等领域,它作为智能设备的联系纽带,把挂接在总线上、作为网络节点的智能设备连接成为一种全分布网络控制系统[5].而基于以太网Ethernet的上位机网络,具有低成本、易组网、高速率等特点,满足开敞式码头全方位的信息传递、共享和集成功能.CAN总线与以太网的连接纽带由CAN/Ethernet网关担当.
CAN总线只包含物理层、数据链路层和应用层,采用短帧结构并以多主方式工作.传感器的采集值,采用CAN技术规范(Version 2.0)中定义的含有29位标识符的扩展帧格式来表示.其中,具体涉及到四种不同类型的帧:数据帧(Data Frame)、远程帧(Remote Frame)、错误帧(Error Frame)、过载帧(Overload Frame).数据帧(Data Frame)是由7个不同的位域(Bit Field)组成,包括帧起始(Start of Frame)、仲裁域(Arbitration Field)、控制域(Control Field)、数据域(Data Field)、CRC 域(CRC Field)、应答域(ACK Field)和帧结尾(End of Frame)[6].具体的 CAN 报文格式如表1所示,标识符中的ID28到ID18为基本ID,它定义了扩展帧的基本优先权;而ID17到ID0为扩展ID,表示缆绳或护舷设备编号(如艏缆、艉缆、1JHJ护舷等);数据域由4个字节组成,表示缆力和护舷压力的数值.Can/Ethernet网关是以微处理器+TCP/IP协议栈芯片+以太网物理层接口芯片的形式来组建[7],CAN数据帧经过Can/Ethernet网关中的TCP/IP协议栈各层协议的处理变成以太网帧,即在CAN数据前添加相应的协议头,如链路层的以太网帧头,网络层的IP包头以及传输层的TCP或UDP头.封包好的以太网帧,通过帧上的目的地址,到达目的MAC地址的物理层和数据链路层,在网络层中需要处理相应的IP包和ARP包,ARP包用以实现IP地址与MAC地址的映射,而IP包经过IP协议解析变成了ICMP包、TCP包或UDP包,ICMP包经过ICMP协议处理后,发送错误报告或信息,TCP或UDP包经过TCP或UDP协议解析后,将数据传输到应用层中的上位机系统.上位机与Can/Ethernet网关的传输采用SOCKET套接字连接,其中网关工作在服务器端,上位机工作在客户端.传输时双方首先建立SOCKET套接字,服务器端(网关)绑定套接字,监听指定端口,等待连接.客户端(上位机)发送建立连接命令Connect(),等待服务器端回应.连接建立后,缆力与护舷压力数据开始进行上传,上传结束后关闭套接字连接.

表1 CAN报文格式定义
2.2 其余监控对象的数据传输
其余监控对象的数据传输方案:现场采集的实时数据,通过CDMA 2000 1X发送模块的空中接口,将数据帧传输到PDSN网关,网关将数据帧封装成以太网帧进入上位机网络,最终到达目的上位机系统.船舶静态属性、部分船舶动态属性、海洋环境信息及视频监测信息的采集监测节点分布广阔,海况复杂恶劣,有线传输方案存在布线、传输距离及扩展性方面的限制,而采用卫星通信又价格不菲,因此移动通信网就成为首选数据传输方式.同时,采用CDMA2000 1X的3G网络相比于GSM和GPRS,在传输速率和传输带宽具有明显优势,例如在视频监测信息中,CDMA2000 1X可以达到384 kbps的速率,以码头现场24位摄像机拍摄的CIF(分辨率为352 dpi×288 dpi)格式视频画面为基础,算出每帧的原始数据量为352×288×24÷1 024=2 376 kbit,系统同时采用图像压缩比为250∶1的H.264标准进行压缩编码,则CDMA2000 1X每秒可传帧数为384÷(2 376÷250)=40帧,由于24帧/s就能使人眼观察到顺畅画面,因此CDMA2000 1X满足视频监测信息的带宽要求[8].
CDMA2000 1X的技术基础是CDMA(Code Division Multiple Access)码分多址技术,它是在分支-扩频通信技术上发展起来的一种扩频技术,其原理是将被传送信号用一个带宽远大于被传信号的高速伪随机码(PN码)进行调制,导致了原信号带宽的扩展,然后经载波调制(二进制相移键控BPSK)发送,接收端采用完全相同的高速伪随机码,对接收信号进行相应的处理,把扩展宽带信号还原回了原被传送信号[9].CDMA2000 1X——以太网Ethernet网络结构如图3所示,包括传感器采集终端、CDMA数据传输单元(CDMA DTU)、基站收发机 BTS(Base Transceiver Station)、基站控制器 BSC(Base Station Controller)、分组控制功能 PCF(Packet Control Function)、分组业务数据节点PDSN(Packet Data Serving Node)、AAA Server(Authentication,Authorization,Accounting)、归属地代理HA(Home Agent)、上位机.数据链路通道建立后,CDMA数据传输单元(CDMA DTU)利用BTS,将采集到的分组数据发送到BSC上,BSC中的PCF提供到PDSN的PPP帧传输,用来实现监测设备与PDSN的 PPP协议连接,PPP协议包含链路控制协议LCP(Link Control Protocol)、网络控制协议NCP(Network Control Protocol)、认证协议:PAP(Password Authentication Protocol,口令验证协议)、CHAP(Challenge-Handshake Authentication Protocol,挑战握手验证协议),当一个 NCP处于 Opened状态时,PPP传输相应的网络层协议数据包,而PDSN作为接入网关,根据上位机的IP地址,最终将数据封包发送到上位机监控中心.PDSN提供了简单IP和移动IP两种接入方式,简单IP就是从PDSN的地址池中分配一个动态IP地址给某一监测设备,使监测设备可以和外界进行通信;而移动IP是PDSN周期性的向监测设备发送代理广播消息,代理广播中含有地址池中的一系列地址.特别指出,视频监测信息在传输层采用了RTP/RTCP协议,采集压缩后的视频数据首先进行了RTP封装,RTP提供端到端的实时数据传输服务,还需使用UDP协议作为下一层协议,对RTP包进行UDP封装和IP封装,共同完成视频分组数据的传输[10].

图3 CDMA2000 1X——以太网Ethernet网络结构
3 模拟仿真
上位机系统是整个监控系统的核心,控制着整个系统的正常运转,完成对监控终端设备的数据、状态、故障等信息的解析处理,并以图形方式显示给管理员或用户.KingView组态王开发监控系统软件,是新型的工业自动控制系统,它以标准的工业计算机软、硬件平台构成的集成系统取代传统的封闭式系统,具有适应性强、开放性好、易于扩展、经济、开发周期短等优点.使用组态王开发的基本过程为图形界面的设计、构造数据库、建立动画连接、运行和调试.图4为组态王KingView 6.55进行的开敞式码头系靠泊网络化实时监控系统的仿真界面.

图4 实时监控系统仿真界面
4 结论
本文通过分析开敞式码头系靠泊网络化实时监控系统中的监控对象,确定了由监控层、网关层和网络层构成的三层数据传输网络体系结构.缆力与护舷压力采用CAN总线作为监控层网络,其他监控对象则采用CDMA2000 1X作为监控层网络,二者通过对应Can/Ethernet网关和PDSN网关的处理,将数据上传至以太网中的上位机系统.最后,通过组态王KingView 6.55模拟仿真了上位机系统的监控界面,验证了提出方法的有效性.
[1][佚名].30万吨级油轮搁浅大连新港及时救助没造成污染[EB/OL](2006-07-16)[2013-11-20]http://www. nen. com. cn/77972966595362816/20060716/1963538.shtml.
[2]范寅初.对开敞式码头总平面设计若干问题的探讨[J].中国水运,2013,13(8):281-282.
[3]方淡玉,黄橙,王新辉.基于船舶六自由度运动的船舶航行安全实时监控系统研究[J].数字技术与应用,2013(6):24-25.
[4]付晓鸥.电阻应变式传感器的工作原理及应用[J].福建电脑,2012(1):159+133.
[5]饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003.
[6]刘伯峰,李磊,王建晓,等.CAN总线技术在船舶气象仪中的应用[J].机械管理开发,2009,24(1):186-187.
[7]李峰.基于CAN总线和以太网的船舱机舱监控系统研究与设计[D].山东:山东大学,2009.
[8]白立岗,周超雄,胡赟,等.基于3G网络和H.264标准的公交车无线视频监控系统研究[J].公路交通科技(应用技术版),2009(4):178-180.
[9]瞿少成,王晓燕,王显文,等.CDMA通信系统动态仿真分析与研究[J].华中师范大学学报(自然科学版),2007,41(4):528-532.
[10]刘丰男,董学仁,马玉真,等.基于3G技术的海水养殖动态监控系统[C].第三十届中国控制会议,中国山东烟台,2011.
