基于vissim软件的行人过街交叉口协调控制方案比选与仿真
2015-02-18廖为东左忠义
廖为东,左忠义
(大连交通大学 交通运输工程学院,辽宁 大连 116028)*
0 引言
目前,在我国的多数城市,行人过街信号控制交叉口作为城市的节点,是城市交通事故突发的主要集中地.如何尽可能一直绿灯通行,从而提高交通效率,减少安全隐患,减少等待时间,一直是摆在城市交通研究者们眼前的难题.在大连,我们经常看到:关键信号交叉口的信号周期达到了130 s以上,个别超过180 s,行人等待过街时间超过50 s甚至70 s.管理部门片面的追求长周期和增加车道数,从而导致行人等待时间超过了其可忍受时间,行人违章过街进一步增加[1].如何提出并进行协调控制方案的比选与仿真,是本文研究的重点.最近几年,国内学者在干路交叉口协调控制方面做了比较深入的研究,比如,卢凯和徐闽建[2]等通过对协调控制系统相位优化设计,提出了相位差模型;王俊刚[3]等以绿波带宽度最大作为目标函数,以时差作为决策变量,提出了干线协调模型;从国内外的研究现状来看,大多数专家学者在协调控制理论方面,几乎忽略了行人过街信号交叉口,都是优先考虑干路交叉口[4].
基于当前研究的缺陷和当前理论的空白,本文通过提出了三种行人过街信号与交叉口信号联动协调的控制方案并进行了模拟仿真.
1 路段平面行人过街路口特性分析
1.1 行人过街行为交通特性分析
行人过街速度是指行人通过人行横道的速度,是行人过街的一个重要参数,对研究行人设施的设计,过街信号的控制,通行能力,服务水平等都起着重要的作用;跟行人过街的等待忍受时间也密切相关.调查大连交通大学校门口不同年龄组别的行人平均过街速度如表1所示.
表1 交通大学正门口行人速度调查 m/s
卢守峰,王红茹等[5]通过调查指出,行人过街最大等待忍受时间在40~50 s范围内;基于此点,本文在这里选取50 s作为行人过街最大等待忍受时间.
1.2 机动车流交通特性分析
机动车交通特性分析,本文主要对相位差和延误进行分析,首先有必要对上下游交叉口的现状进行分析.经过调查,大连交通大学正门行人过街距离上游黄河路/西南路交叉口的距离为253 m,距离下游黄河路/西山街交叉口的距离为350 m.黄河路为双向6车道.交通大学正门行人过街为按钮式感应信号控制行人过街交叉口.
(1)相位差:是指相邻两信号的绿灯起点的时间之差.为了使得车辆通过协调信号控制系统时,能连续通过尽可能多的绿灯,必须是的相邻信号间的相位差同其行程时间相适应,所以相位差是信号协调控制系统的关键参数.要想取得相位差,首先要知道车速.
车速是绿波带设计重要因素.在进行绿波协调控制时候,假设车速选取不当,方案控制效果会受到影响,甚至导致方案控制失败.对单个车速来说可能千差万别,但是对大量的整体数据来说,肯定是呈现规律性和整体性.通过路段高峰时段车流和行程速度进行调查,由调查结果统计得出的路段车速频率分布见图1,取设计车速为频率最大速度的均值,出现频率最高的速度组中值是32.25 km/h.
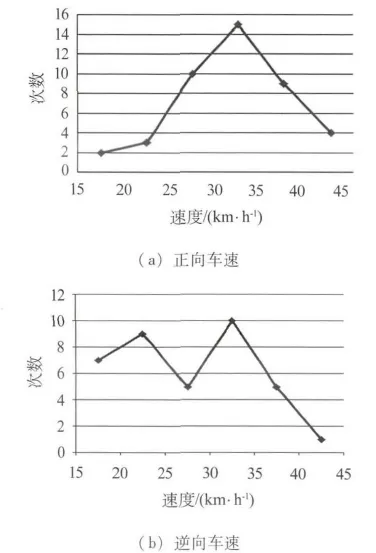
图1 黄河路段车速频率分布图
(2)延误
韦伯斯特提出了下列计算车辆平均延误的公式:

式中:C为最佳周期长度(s);λ为绿信比;q为交通流量.
2 行人过街信号与交叉口信号协调控制方案比选
车辆经常碰到红灯,时停时开,造成行车不畅通,也增加了环境污染.进行相位协调控制,即减少在各个交叉口的停车时间,为路段过街行人提供可穿越空档,进而保证行人安全,减少因为冲突而导致的交通事故,减少行人和车流的等待时间,确保行人和车流顺畅通行,减少延误.其中选择是否合适的协调控制方案会直接影响到协调控制的效果,下一步我们将会提出三种方案并且进行比选.
2.1 绿波带设计思想的交叉口信号协调控制
为了使干道路上的车辆能够畅通,人们把一条干道上一批相邻的交通信号灯连接起来,加以协调控制,使车辆获得不停顿的通行权,就是我们所说的绿波控制.当相邻两个信号灯的距离不是很长时,易于为广大驾驶员所采纳,而且它操作简便,相对经济,所以是一种比较常见的道路交通控制方法.为使主干路道路交通通行能力最大,在制定干线道路信号配时方案时遵循原则之一是使带宽最大.并且它设置主要交叉口原则,优先考虑主要交叉口,在考虑次要交叉口.
这种做法的原始思路是:希望使车辆再通过第一个交叉口后,按照一定的速度行驶,到达下游交叉口希望不再遇到红灯.但是在实际情况中,由于各个车辆在路段上行驶时速度不一,而且随时有波动,交叉口有左右转弯机动车进出等因素干扰,所以要想一路绿灯在现实生活中是很难碰到的,但可以沿路少碰到几次红灯,从而减少车辆的停车次数和延误.
2.2 交叉口独立信号协调控制
(a)“Φ式人行横道独立信号”与上下游交叉口信号灯协调控制
由于机动车流具有潮汐现象,所以早高峰和晚高峰,机动车流量是不同的.基于这点,我们有必要对行人过街两端的信号灯进行不同配时的独立控制,这样可以确保分隔带两边都是绿灯通行,使过街更加方便,减少了机动车流的停车率和行人的延误时间,也方便了广大的行人,减少了违章过街.
当采用Φ式独立控制进行二次过街时,分隔带两边的信号配时不同,所以计算出的行人延误也不一样.Φ式独立控制的行人总延误相当于将左右两边的时间延误与在安全岛上等待时间之和.
延误计算公式为:
dp=d1+d2+d等待
式中:d1为左边过街阶段的行人延误(s);d2为右边过街阶段的行人延误(s);d等待为安全岛上等待时间.
(b)“Z式人行横道独立信号”与上下游交叉口信号灯协调控制
对(a)方案,也有缺陷,因为是平行的,而且两边的信号都是独立的,所以当左边是红灯,右边是绿灯的时候,行人看到右边的信号灯和右边的行人开始过街,容易有习惯思维,容易下意识的启动过街,直接造成了违章,导致机动车流紧急刹车或者交通事故.基于这个原因,我们有必要把左边和右边的过街设置成有一定距离,形成错位式.使用Z式过街还有个好处就是可以减少等待忍受时间,因为行人在中间错位安全岛中步行需要一定的时间.一定程度上间接的减少了行人过街的总延误.这种方案的效果图如图2所示.

图2 Z式行人过街独立信号效果图
延误计算:
dp=d1+d2+d等待-d移动
式中:d1为左边行人过街阶段的行人延误(s);d2为右边行人过街阶段的行人延误(s);d等待为岛上等待时间;d移动为行人在安全岛上步行的时间.
综合上面三种方法,我们可以进行大致判断,当行人都是中青年,而且步速较快,我们可以采用绿波带的控制方法,当车流量较大,或者行人都是儿童或者老年人的时候,我们应该设置成Z式人行横道独立信号和Φ式人行横道独立信号.二次过街旨在增强行人过街安全,而绿波带的控制方法由于信号灯设置的比较少,可以减少总延误,所以是目前比较常用的方法,具有潮汐现象时候可以更多的考虑Z式人行横道独立信号.
3 模拟仿真
行人到达路口后,首先要判断这是否是信号控制交叉路口,如果不是,则观察路段交通流情况随时准备过街;如果是信号控制交叉口,则看是否是绿灯,如果是,则进行过街行为,如果不是,则是否打算违法过街,如果是,则在判断交通流情况后违章过街,如果不违章,则进行等待,等待绿灯时间在通过路段交叉口.所以行人过街的心理和等待忍受时间具有很大关系.一般情况下,道路行人交通过街主要包括以下三个部分:到达路口,判断路口红灯还是绿灯,步行过街等,具体过程如图3所示.

图3 行人过街过程演示图
利用VISSIM软件进行交通上下游方案控制模拟仿真,其过程包括建立路段路径、设定仿真参数、进行仿真模拟和导出仿真结果等步骤.建立仿真环境的过程,就是将能够表征实际路网环境和运行状态的结构和参数,绘制或输入到计算机软件当中的过程,包括上下游交叉口路段的几何布局、信号灯配时参数、各个路段流量等.最后进行仿真结果导出.

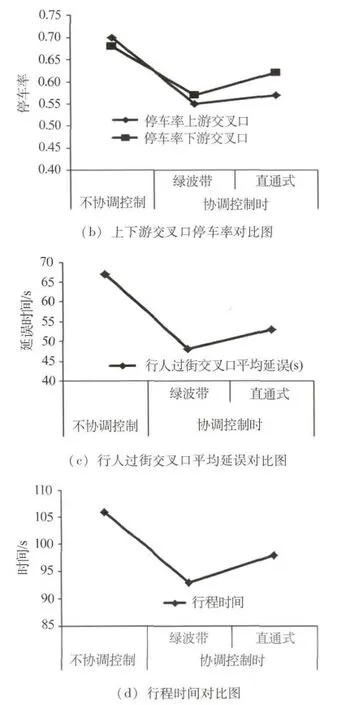
图4 模拟仿真结果对比图
根据vissim仿真软件的输出文件,得出在不同情况下,上下游交叉口车辆平均延误,停车率,行人平均延误和行程时间方案对比如图4所示.
由图4可以看出,以黄河路大连交通大学正门口行人过街为例,当设置人行过街信号进行协调时,上下游交叉口处的停车率和车辆平均延误都比不协调控制的时候小;当路段进行协调控制的时候,绿波带协调控制方案,对交通大学正门口来说是最好的.
4 结论
在城市道路网络中,交叉口相距较近,如何方便的进行联动控制一直是交通管理和研究学者关注的课题,有较强的实际应用价值.本文在对路段行人特性和机动车流特性进行充分调查分析后,提出了绿波带,Φ式人行横道独立信号,Z式人行横道独立信号三种协调方案,并在此基础上提出了各自的适应范围.以大连交通大学正门口行人过街协调控制为例,对以上三种协调控制方案运用vissim软件进行了模拟仿真,仿真结果表明,绿波带协调控制方案是最适合该路口,停车率和延误是最低的.
[1]李娜.路段行人过街信号与交叉口信号协调控制研究[D].南京:东南大学,2004.
[2]卢凯,徐建闽.干道协调控制相位差模型及其优化方法[J].中国公路学报,2008(1):87-92.
[3]王俊刚,于泉,高颖,等.变带速干线协调控制模型研究[J].公路交通科技,2005(4):111-114.
[4]郑长江.行人过街信号与交叉口信号联动控制方法研究[D].南京:东南大学,2006.
[5]卢守峰,王红茹,刘喜敏.基于生存分析法的行人过街最大等待时间研究[J].交通信息与安全,2009(5):69-71.
