基于2D模型的网络系统迭代学习控制设计方法
2015-02-18尹艳玲王泰华
尹艳玲, 王泰华, 曾 旗
(1. 河南理工大学电气工程与自动化学院, 河南 焦作 454000;
2. 河南理工大学经济管理学院, 河南 焦作 454003)
基于2D模型的网络系统迭代学习控制设计方法
尹艳玲1, 王泰华1, 曾旗2
(1. 河南理工大学电气工程与自动化学院, 河南 焦作 454000;
2. 河南理工大学经济管理学院, 河南 焦作 454003)
摘要:迭代学习控制(iterative learning control, ILC)方法应用于网络控制系统时,由于数据需要在控制器和远程对象间传输经常产生数据丢失现象。给出了一种存在数据丢失时网络系统的随机迭代学习控制设计方法,首先将数据丢失现象描述为随机伯努利序列,在此基础上将迭代学习的控制器设计转化为随机2D-Roesser系统的稳定问题。定义了随机意义下2D系统的均方渐进稳定,基于线性矩阵不等式(linear matrix inequality, LMI)给出一个判别稳定性的条件,该条件同时可实现迭代学习控制器的设计。仿真示例验证了设计方法的有效性。
关键词:迭代学习控制; 网络控制系统; 数据包丢失; 2D-Roesser模型; 随机系统
0引言
迭代学习控制(iterative learning control, ILC)由日本学者Arimoto在1984年提出[1],该方法针对具有重复运行特征的系统通过不断学习可实现有限时间区间内的完全跟踪控制。目前,迭代学习控制已取得了丰富的理论成果和实际应用[2-7]。然而,现有的研究成果大多基于控制系统数据传输是完美的这一假设给出,即数据可以完全地在实际对象与控制器间的传输,不存在数据包丢失现象。实际系统中,由于数据检测单元或网络传输机制的故障,经常引起数据包丢失。尤其在目前广泛采用的网络控制系统中,数据丢失现象更易发生[8-10]。因此,研究网络参量约束下的迭代学习控制具有重要意义。
目前,上述问题已有一些研究结果。文献[11]和文献[12]研究了一阶和高阶P型ILC算法存在测量数据丢失的稳定性问题,给出了系统收敛的判定条件。文献[13]针对同时存在控制输入数据和测量数据丢失的非线性系统,给出了ILC算法稳定的条件,并基于压缩映射方法给出了收敛性证明。文献[11-13]的研究结果表明,对于稳定的ILC系统,当存在一定程度的数据丢失时,系统仍然是稳定的,但系统收敛速度随着数据丢失的严重而变慢。文献[14]和文献[15]针对存在数据丢失的线性系统,给出了一种最优ILC的设计方法,该方法可以在迭代域补偿数据丢失的影响,获得较好的跟踪性能。文献[16]针对存在数据丢失的非线性系统提出一种均值ILC算法,该方法通过对过去多次迭代过程中的数据求均值可有效补偿数据丢失的影响。文献[17]针对存在数据丢失的线性系统,在随机均方稳定的意义下给出一种H∞ILC的设计方法。然而,上述设计方法中大多采用了Lifting的表述形式。Lifting方法虽然可将二维迭代学习控制系统描述为多输入多输出的一维系统,但系统矩阵的维数与采样数据成正比,当采样数据较多时系统计算量非常之大,不适于实际应用[18]。
2D系统模型可以较好地刻画迭代学习控制系统的动态变化过程,为ILC提供了一种有效、系统的分析和设计手段。文献[19-20]基于2D-Roesser系统理论给出了一种分析ILC系统稳定性的方法,文献[21-22]基于2D-Roesser系统模型讨论了线性时滞ILC系统的稳定性分析和鲁棒控制器设计方法,文献[23-25]基于2D-Roesser系统模型给出了几种不同类型的鲁棒H∞ILC设计方法。然而,上述基于2D系统理论的ILC设计方法均未考虑数据丢失的情况。当系统存在任意数据丢失时描述ILC系统的2D模型变为随机系统,已有的设计结果无法推广。
本文考虑网络系统存在数据丢失时,基于2D理论的随机ILC设计方法。由于数据丢失的引入使得系统变为随机系统,我们首先定义随机意义下的均方渐进稳定,然后将ILC设计问题转化为随机2D-Roesser系统的稳定性问题。基于线性矩阵不等式给出了判断随机2D系统稳定的一个充分条件,该条件同时可实现ILC控制率的设计。仿真示例验证了设计方法的有效性。
1问题描述
考虑如下SISO系统:

(1)
式中,x(t,k)∈Rn,u(t,k)∈R1,y(t,k)∈R1分别为系统状态、控制输入和系统输出;A∈Rn×n, B∈Rn×1,C∈R1×n为状态空间方程的矩阵;下标k表示迭代次数;t为离散时间;x(0,k)=x0k为第k次迭代过程的初始条件。系统在有限时间区间t∈[0,T]内重复运行,其期望轨迹为yd(t)。
针对系统式(1),考虑如下P型ILC算法,有

(2)
式中,e(t,k)=yd(t)-y(t,k)为跟踪误差;K为待设计的控制器增益。
当上述ILC系统通过网络控制的方式实现时,数据u(t,k),y(t,k)需要经过网络在远程对象和控制器之间进行传输。在此过程中由于网络故障经常产生数据丢失现象。本来仅考虑输出测量数据y(t,k)丢失的情况,此时ILC算法式可表述[11-12]为

(3)
式中,α(t,k)为取值0和1的随机Bernoulli变量,满足


(4)

本文的研究内容为,对于存在满足式(4)随机数据丢失的ILC系统式(1)和式(3),如何设计控制器增益K使得系统稳定。
2问题描述
2.12D系统描述
迭代学习控制系统式和式是一个沿着时间t和迭代k变化的二维系统,根据2D系统理论[19-20],可将上述ILC系统描述成2D-Roesser模型。
由式(1)和式(3)可知

CAx(t-1,k)+CBu(t-1,k)-CAx(t-1,k+1)-

(5)
式中,η(t,k)=x(t-1,k+1)-x(t-1,k)。
同时

Bu(t-1,k+1)-Ax(t-1,k)-

(6)
式(5)和式(6)可以重写为

(7)
定义η(t,k)=xh(t,k),e(t,k)=xv(t,k)可得
(8)
注 1系统式为一个典型的2D-Roesser系统。因此,ILC系统的控制率式设计可以等价为2D-Roesser系统式的稳定性问题。需要说明的是,系统式所描述的2D系统由于随机变量α(t,k)的引入使得系统为随机2D系统,因此已有基于确定2D系统设计ILC的方法[19-25]在这里无法应用。为了进行本文的设计,我们需要定义如下随机2D系统的稳定性[26]。
定义 1随机稳定:若2D 系统式(8)针对任意有界的初始边界条件xh(0,k),xv(t,0), 满足
则系统均方渐近稳定。
至此,本文的研究内容可转化为针对满足式(4)随机数据丢失的ILC系统,如何设计控制器增益K使得2D随机系统式(8)均方渐近稳定。
2.2控制器设计



(9)
式中
定理 1若存在正定矩阵P1,P2满足
证明 定义
式中
考虑如下指标:

(10)
式中

(11)
将上式依次展开可得
(12)
(13)
(14)

(15)
(16)
将式(12)~式(16)两端相加得
E{xh(i+1,0)TP1xh(i+1,0)}
将上式的右端逐项展开可得
上式意味着
(17)
式中


上述不等式两端相加可得
(18)
证毕
我们首先给出如下引理。
引理 1Schur补引理[27]:对于正定矩阵W,V和矩阵L,若如下不等式成立:
LTVL-W<0
当且仅当
或
成立。
根据引理1和定理1,我们可给出如下定理。
定理 2若存在正定矩阵Q1,Q2和矩阵M满足如下线性矩阵不等式
(19)
注 2定理2给出一个判别2D随机系统式均方渐进稳定的条件,该条件可转化为求线性矩阵不等式的可行解问题。同时,根据矩阵不等式的可行解我们可以确定一个满足条件的ILC控制率。从理论分析过程可以看出,定理2的结果可以很方便地推广到系统存在参数不确定性、H∞扰动抑制能力等情况下的ILC控制器设计。
注 3本文给出了一种存在任意数据丢失时基于2D理论的随机迭代学习控制设计方法,在此框架下,我们同样可以讨论任意传输延时、任意扰动作用等随机因素影响时迭代学习控制的设计问题。
3仿真示例
本节通过Matlab软件,验证本文设计方法的有效性。
考虑如下线性离散时间系统:
系统期望轨迹为
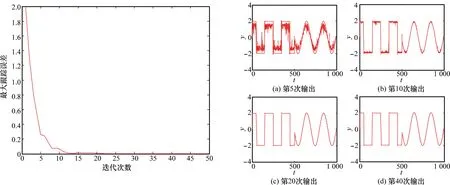
图时的最大跟踪误差 图时不同迭代次数的系统输出
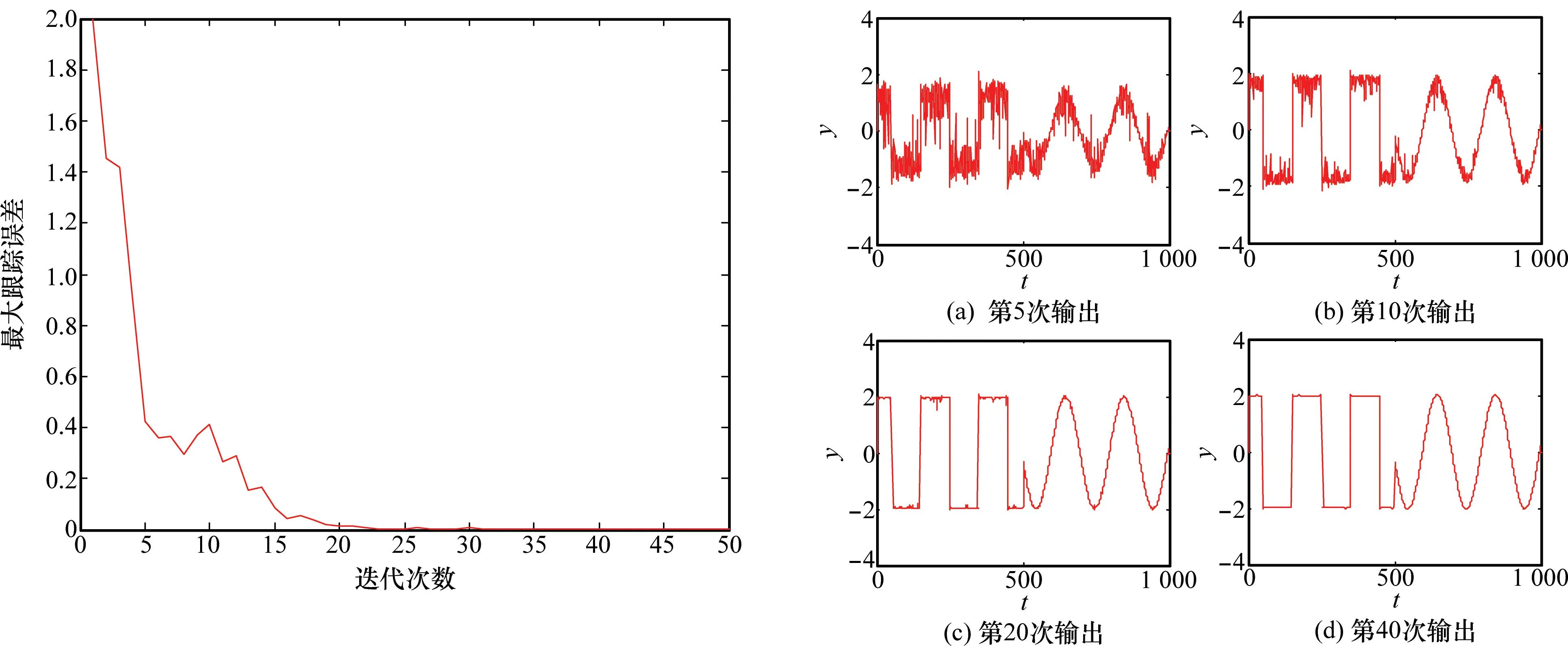
图时的最大跟踪误差 图时不同迭代次数的系统输出
4结论
本文在随机系统的框架下,给出了一种网络系统存在任意数据丢失时ILC的设计方法。首先将数据包丢失描述成任意Bernoulli序列,将ILC的设计转为随机2D系统的稳定问题。给出了随机意义下均方渐进稳定的定义,在此基础上得到一个判断随机2D系统稳定的充分条件,该条件可以转为求解线性矩阵不等式的可行解,同时可给出满足条件的ILC控制器增益。仿真示例验证了设计方法的有效性。本文给出了一种基于2D理论的随机ILC设计方法,在此框架下,同样可以讨论任意传输延时、任意扰动等随机因素作用时ILC的设计问题。
参考文献:
[1] Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robots by learning[J].JournalofRoboticSystems, 1984, 1(2):123-140.
[2] Bristow D, Tharayil M, Alleyne A. A survey of iterative learning control:a learning-based method for high-performance tracking control[J].IEEEControlSystemMagazine, 2006, 26(3):96-114.
[3] Ahn H, Chen Y, Moore K. Iterative learning control:brief survey and categorization[J].IEEETrans.onSystems,Man,andCybernetics-PartC:ApplicationsandReviews, 2007, 37(6):1099-1121.
[4] Chi R H, Sui S L, Hou Z S. A new discrete-time adaptive ILC for nonlinear systems with time-varying parametric uncertainties[J].ActaAutomaticaSinica, 2008, 34(7):805-808.
[5] Ruan X E, Bien Z, Park K H. Decentralized iterative learning control to large-scale industrial processes for nonrepetitive trajectory tracking[J].IEEETrans.onSystem,ManandCybernetics-PartA, 2008, 38(1):238-252.
[6] Sun M X, Wang D W. Initial shift issues on discrete-time iterative learning control with system relative degree[J].IEEETrans.onAutomaticControl, 2003, 48(1):144-149.
[7] Chi R H, Hou Z S, Xu J X. A discrete-time adaptive ILC for systems with iteration-varying trajectory and random initial condition[J].Automatica, 2008, 44(8):2207-2213.
[8] Yang T C. Networked control system:a brief survey[J].IEEProceedings-ControlTheoryandApplications, 2006, 153(4):403-412.
[9] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems[J].ProceedingsoftheIEEE, 2007, 95(1):138-162.
[10] Zhang W, Branicky M, Phillips M. Stability of networked control systems[J].IEEEControlSystemsmagazine, 2001, 21(1):85-99.
[11] Bu X H, Hou Z S. Stability of iterative learning control with data dropouts via asynchronous dynamical system[J].InternationalJournalofAutomationandComputing,2011,8(1):29-36.
[12] Bu X H, Hou Z S, Yu F S. Stability of first and high order iterative learning control with data dropouts[J].InternationalJournalofControl,AutomationandSystems,2011,9(5):843-849.
[13] Bu X H, Yu F S, Hou Z S, et al. Iterative learning control for a class of nonlinear systems with random packet losses[J].NonlinearAnalysis:RealWorldApplications, 2013, 14(1):567-580.
[14] Ahn H, Chen Y, Moore K. Intermittent iterative learning control[C]∥Proc.oftheIEEEInternationalSymposiumonIntelligentControl, 2006:832-837.
[15] Ahn H, Chen Y, Moore K. Discrete-time intermittent iterative learning control with independent data dropouts[C]∥Proc.ofthe17thInternationalFederationofAutomaticControlWorldCongress, 2008:12442-12447.
[16] Liu C P, Xu J X, Wu J. Iterative learning control for network systems with communication delay or data dropout[C]∥Proc.ofthe48thIEEEConferenceonDecisionandControl, 2009, 4858-4863.
[17] Bu X H, Hou Z S, Yu F S. et al.H∞iterative learning controller design for a class of discrete-time systems with data dropouts[J].InternationalJournalofSystemsScience, 2014, 45(9):1902-1912.
[18] Haber A, Fraanje R, Verhaegen M. Linear computational complexity robust ILC for lifted systems[J].Automatica, 2012, 48(6):1102-1110.
[19] Kurek J E, Zaremba M B. Iterative learning control synthesis based on 2-D system theory[J].IEEETrans.onAutomationControl, 1993, 38(1):121-125.
[20] Chow T, Fang Y. An iterative learning control method for continuous-time systems based on 2-D system theory[J].IEEETrans.onCircuitsSystemI,FundamentalTheoryandApplications, 1998, 45(4):683-689.
[21] Li X D, Chow T, Ho J. 2-D system theory based iterative learning control for linear continuous systems with time delays[J].IEEETrans.onCircuitsSystemI, 2005, 52(7):1421-1430.
[22] Meng D, Jia Y, Du J, et al. Feedback approach to design fast iterative learning controller for a class of time-delay systems[J].IETControlTheoryApplication, 2009, 3(2):225-238.
[23] Shi J, Gao F, Wu T J. Robust design of integrated feedback and iterative learning control of a batch process based on a 2D-Roesser system[J].JournalofProcessControl, 2005, 15(8):907-924.
[24] Liu T, Wang Y. A synthetic approach for robust constrained iteration learning control of piece affine batch processes[J].Automatica, 2012, 48(11):2762-2775.
[25] Wang Y, Yang Y, Zhao Z. Robust stability analysis for an enhanced ILC-based PI controller[J].JournalofProcessControl, 2013, 23(2):201-214.
[26] Gao H, Lam J, Xu S, et al. Stability and stabilization of uncertain 2-D discrete systems with stochastic perturbation[J].MultidimensionalSystemsandSignalProcessing,2005,16(1):85-106.
[27] Boyd S, Ghaoui L, Feron E, et al.Linearmatrixinequalitiesinsystemandcontroltheory[M]. Philadelphia:Society for Industrial and Applied Mathematic, 1994.
尹艳玲(1981-),女,讲师,硕士,主要研究方向为网络化控制、系统分析与集成。
E-mail:jzityyl@126.com
王泰华(1976-),男,副教授,硕士研究生导师,主要研究方向为智能控制理论及应用、电机控制技术、工业过程控制。
E-mail:wangtaihua@hpu.edu.cn
曾旗(1962-),男,教授,博士研究生导师,主要研究方向为网络化管理与控制、系统工程。
E-mail:zengqi@hpu.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141105.1500.002.html
Network-based iterative learning control design based on 2D model
YIN Yan-ling1, WANG Tai-hua1, ZENG Qi2
(1.SchoolofElectricalEngineering&Automation,HenanPolytechnicUniversity,Jiaozuo454000,China;
2.SchoolofEconomicsandManagement,HenanPolytechnicUniversity,Jiaozuo454003,China)
Abstract:When the iterative learning control(ILC)is applied to networked control systems, packet dropouts often occur due to the data transfer from the remote plant to the ILC controller. A stochastic ILC design approach for networked control systems with data dropouts is given. Missing data is firstly modeled by stochastic variables satisfying the Bernoulli random binary distribution. Then, the design of ILC is transformed into the stability of a 2D stochastic system described by the Roesser model. The mean-square asymptotic stability is defined for such 2D stochastic systems. A sufficient condition for stability is established by means of linear matrix inequality(LMI)technique, and formulas can be given for the controller design simultaneously. The effectiveness of the proposed method is illustrated by a numerical example.
Keywords:iterative learning control (ILC); networked control systems; data dropout; 2D-Roesser system; stochastic system
作者简介:
中图分类号:TP 273
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.28
基金项目:国家自然科学基金(61203065);河南省控制工程重点学科开放实验室项目(KG2011-10)资助课题
收稿日期:2014-06-19;修回日期:2014-10-16;网络优先出版日期:2014-11-05。
