基于强跟踪器的机动航天器相对动态定位算法
2015-02-18孙守明
黄 普, 钱 山, 谢 鑫, 孙守明
(宇航动力学国家重点实验室, 陕西 西安 710043)
基于强跟踪器的机动航天器相对动态定位算法
黄普, 钱山, 谢鑫, 孙守明
(宇航动力学国家重点实验室, 陕西 西安 710043)
摘要:针对机动航天器之间精确动态相对定位问题,提出一种基于强跟踪器(strong tracking filter, STF)的动态相对定位算法。该算法针对相对机动过程中3个方向的机动特性,设置三向渐消因子进行三向滤波,克服了单向渐消因子与实际机动不匹配而造成的跟踪精度下降问题, 针对三向滤波在直角坐标系下的跟踪问题,设置去偏转换测量算法,克服了球坐标系与直角坐标系的转换偏差问题。仿真实验表明,该算法在初值敏感性和相对机动恢复性上均强于其他算法,适用于脉冲推力、有限推力等多种情况下机动航天器间精确动态相对定位。
关键词:机动航天器; 相对定位; 强跟踪; 三向滤波; 去偏转换
0引言
航天器之间的相对运动,通常是指一个或一组航天器(称为追踪星)相对于另一个或另一组航天器(称为目标星)的运动。通过空间相对运动,特别是机动航天器间的主动快速相对运动,可有效扩展航天器的观测范围,丰富探测方式,提高工作性能。在相对运动过程中,精确动态定位是基础,如何实现航天器之间的精确动态相对定位成为研究的热点[1-8]。
目前,航天器之间高精度动态相对定位的方法主要分2类:一是利用外界导航系统(GPS、北斗等)获得各个航天器的绝对坐标,差分得到相对位置信息,实现航天器间间接动态相对定位。优势在于算法简单,易于实现,且精度能有一定保障;缺点在于应用存在局限性,非合作目标无法实现,且很难保证实时性。二是对卫星相对运动进行建模(如CW方程),利用星上测量设备(如光学相机、激光雷达和微波雷达),并结合状态估计算法[3-8](如扩展卡尔曼滤波方法)进行动态相对定位。此方法优势在于应用广泛,合作与非合作目标均能适用,且精度较高;缺点在于需要对机动过程快速有效的判断,否则易造成收敛缓慢甚至发散。从公开文献分析,相对定位方案大多采用第2种方法,但这些研究对于相对机动问题尚未涉及,若采用此方法解决问题存在一定局限性。
考虑到相对运动过程,需要机动后的快速收敛及恢复期的精度保证,本文将强跟踪滤波器(strong tracking filter, STF)[9-11]引入到机动航天器间动态相对定位领域,弥补了扩展卡尔曼滤波的不足,保证了相对机动后的快速收敛与恢复精度需求,并且针对相对机动过程中3个方向的机动特性,设置三向渐消因子STF进行三向滤波,避免了单向渐消因子STF与实际机动不匹配而造成的跟踪精度下降问题。针对三向滤波在直角坐标系下的跟踪问题,设置去偏转换测量算法[12-17],克服球坐标系与直角坐标系的转换偏差问题。滤波过程无需机动检测,通用性好,适用于脉冲推力、有限推力等多种情况下机动航天器间精确动态相对定位,而且通过渐消因子的变化,还可达到机动检测的目的。
1机动航天器间相对滤波方案设计
机动航天器间相对滤波方案由状态方程,观测方程、滤波器组成。
状态方程、观测方程是滤波方案的基础,提供滤波方案所需的一步预测信息。滤波器的设置是整个方案的核心,本文采用强跟踪滤波器,在目标发生机动时,根据观测新息计算出渐消因子,强制新息正交,从而保持对目标的强跟踪能力,使滤波时刻保持有效。
1.1近程相对运动目标建模
目前,相对定位方案中对于追踪星与目标星近距离的相对运动建模,主要采用Clohessy-Wiltshire方程,假设目标星轨道为圆轨道,并且两星相对距离远小于轨道半径,则在目标星轨道坐标系中相对运动方程表示为
(1)
写成离散状态方程为
(2)
1.2观测方程
在相对定位过程中,目标运动模型和观测模型通常是在直角坐标系和球坐标系,为了有效利用观测数据进行精确跟踪,需要进行去偏转换,其基本思想是将球坐标系下的测量信息转换到直角坐标系,并估计出转换测量误差的二阶统计特性[12-17],然后利用强跟踪滤波器进行滤波。
在目标观测球坐标中,设置目标的真实距离、方位和俯仰为r,φ和θ,则雷达观测的实际值可表示为
(3)
可得雷达观测值与目标位置之间的转换关系为
式中,x=rcos(φ)cos(θ),y=rsin(φ)cos(θ),x=rsin(θ)。

式中
e-4σ2φe-2σ2θsinφmcosφm
e-σ2φe-4σ2θcosφmsinθmcosθm
e-σ2φe-4σ2θsinφmsinθmcosθm
其中




由此可得修正后的转换量测公式为
(4)
此时,观测方程可建模为
(5)
2强跟踪滤波器
2.1基本原理
文献[9-11]对强跟踪滤波器进行了系统论述,其基本原理如下所示。
对于如下形式的系统:
(6)
式中,wk+1,vk+1是零均值的高斯白噪声,且互不相关。
标准的Kalman滤波算法如下:
(7)
(8)
(9)
(10)
(11)
强跟踪滤波的本质是通过改变一步预测方差,调整滤波增益矩阵满足下列2个条件:
(12)
在目标跟踪过程中,存在多种运动过程,当运动状态改变时,模型的偏差会造成估计偏差,通过观测新息序列表现出来,这时如果适当调整一步预测方差,使之满足式(12),就可强制残差序列时刻正交,从而提高观测信息的有效性,保持对目标的跟踪。一步预测方差的调整为
(13)
对于渐消因子Λk+1,计算方法如下:
(14)
(15)
(16)
(17)
(18)
(19)
式中,0<ρ≤1是遗忘因子,代表对测量新息的遗忘速率,ρ的值越小,遗忘速率越大,常取ρ=0.95;β≥1是弱化因子,代表状态估计的平滑性,一般根据经验选取。
综上所述,扩展卡尔曼滤波是强跟踪滤波器的基础,关键之处在于强跟踪滤波器引入了渐消因子对一步预测误差方差进行修正,渐消因子的计算如式(14)~式(19),可通过新息的变换反映出来,在跟踪机动情况较小的目标时,新息较小,渐消因子为1,算法退化为扩展卡尔曼滤波算法,保持了对目标的跟踪精度;在目标发生机动时,新息增大,渐消因子也增大,间接增大滤波增益,从而提高目标机动时的跟踪性能。然而,相对机动过程中三轴机动特性明显不同,切向变化较大,径向与法向变换较小,状态变量协方差矩阵如按照渐消因子的大小进行统一放大,会造成与实际机动不匹配,从而影响跟踪精度,针对于此,本文设置多元渐消因子进行三轴滤波,可以较好的自适应跟踪相对机动目标。
2.2算法过程及流程图
下面给出基于强跟踪滤波器的机动航天器相对动态定位算法流程,如图1所示。
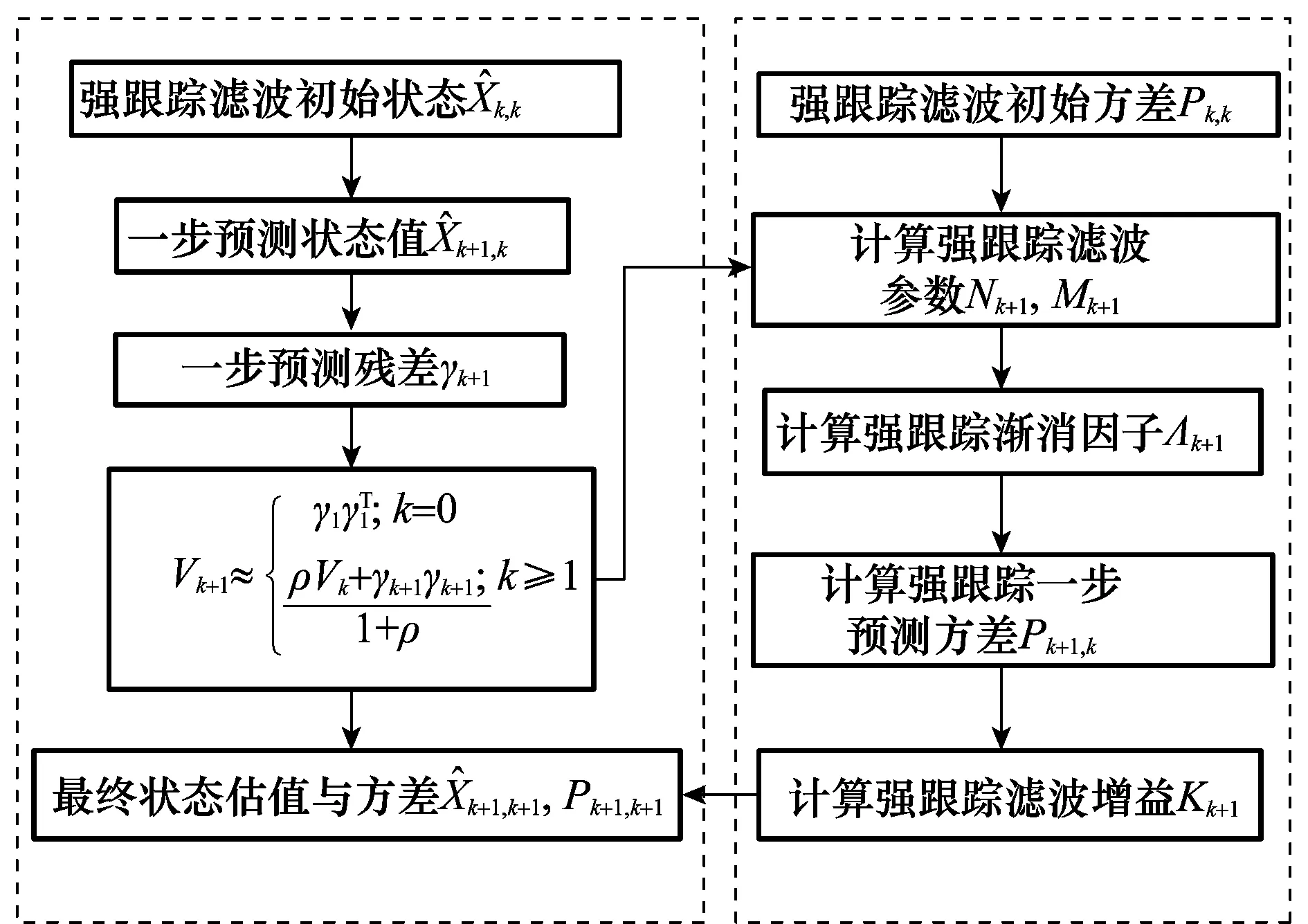
图1 强跟踪滤波器算法流程图

步骤 2考虑到相对运动过程中,切向机动特性与其他两项不同,分别设置强跟踪滤波器参数。本文根据经验分别设置为ρx=0.95,βx=1.1,ρy=0.90,βy=2,ρx=0.95,βx=1.1。
步骤 4根据次优渐消因子Λk+1,计算新的一步预测方差Pk+1,k。

步骤 6令k=k+1,转向步骤3,循环计算。
3数值仿真
本节通过仿真轨道数据及测量数据,对扩展卡尔曼滤波,强跟踪滤波和转换测量强跟踪滤波进行分析比较,验证算法性能:
初始轨道历元:2011年11月02日23:00:0.81。
目标星初始轨道参数:半长轴6 718 043.298m,偏心率0.000 88,轨道倾角42.792°,升交点赤经349.228°,近地点角距186.865°,真近点角357.602°。
追踪星初始轨道参数:半长轴6 705 183.417m,偏心率0.000 96,轨道倾角42.792°,升交点赤经349.229°,近地点角距190.572°,真近点角353.379°。
观测条件为目标星上雷达设备,测量信息为测距ρ,测角A,E,测量设备只考虑随机误差σρ=10m,σAE=0.005°。
初始状态位置偏差20m,速度1m/s,仿真步长为1s,仿真时间为25 000s,机动时刻为:2011-11-02-23:17:29(北京时),总点火时长:49s,推力:579N,质量:7 980kg。则扩展卡尔曼滤波,强跟踪滤波和转换测量强跟踪滤波计算结果如图3~图8所示,其中横轴为积秒,纵轴为偏差。
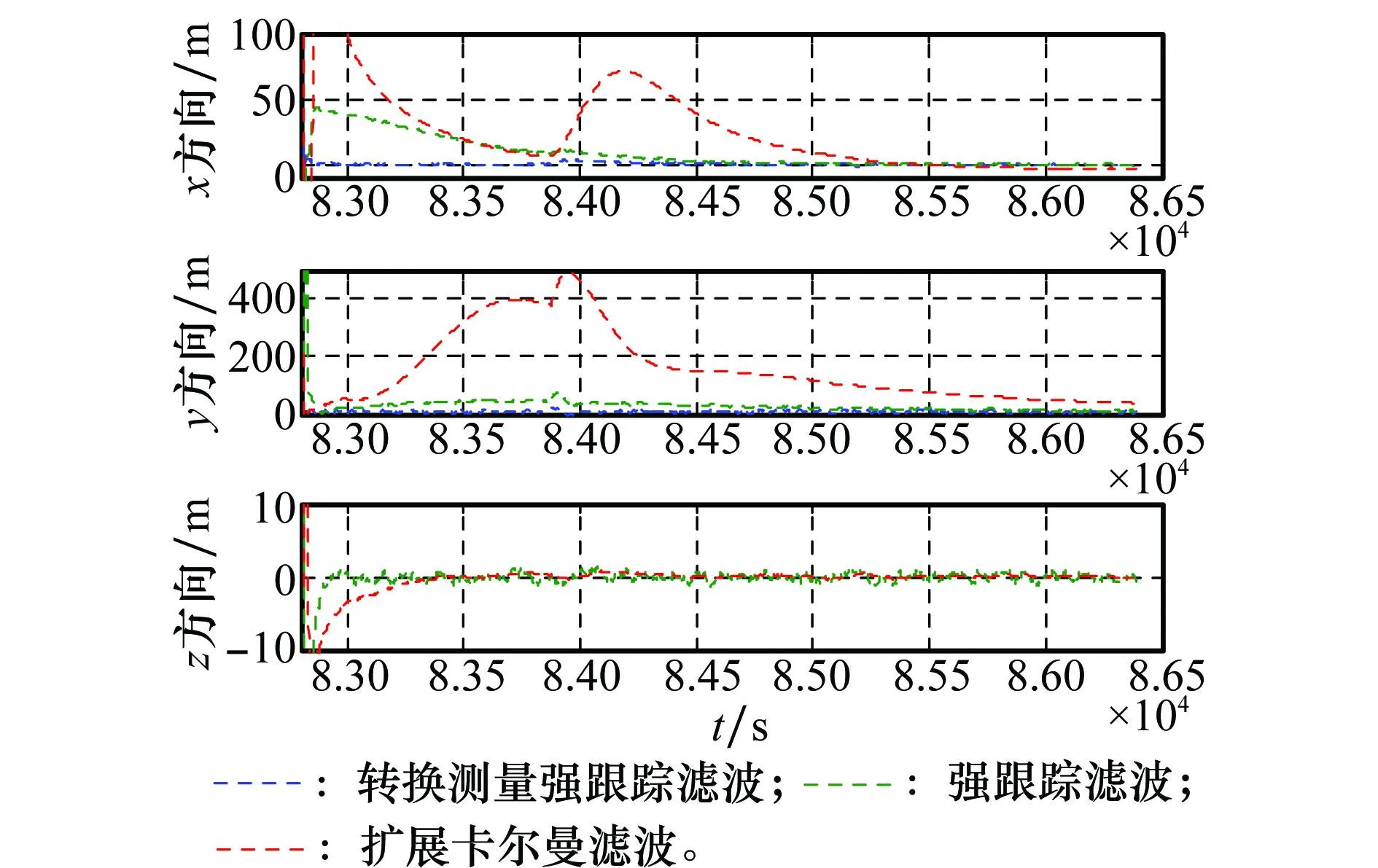
图2 3种算法的位置精度

图3 3种算法的速度精度
由图3和图4可知,整个机动过程中三轴机动变化明显不同,Z轴变化最小,Y轴变化最大,也体现三轴滤波的好处。3种算法在整个机动过程中均能收敛,其中扩展卡尔曼滤波精度最差,强跟踪滤波次之,转换测量强跟踪滤波最好。在发生机动后,扩展卡尔曼滤波在系统运行800 s后速度收敛,强跟踪滤波和转换测量强跟踪滤波在系统运行200 s后收敛。转换测量强跟踪滤波器在整个非机动过程中的位置滤波精度在5.0 m量级,速度滤波精度在0.5 m/s量级,稳定性、收敛性远远高于常规滤波算法。

图4 3种算法的初始位置精度
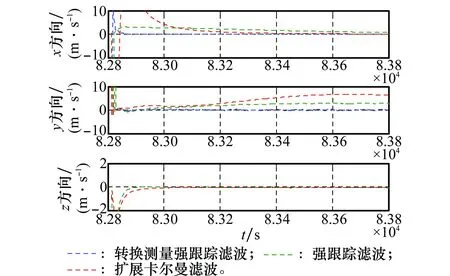
图5 3种算法的初始速度精度
由图5和图6可知,3种算法在初值敏感性上,扩展卡尔曼滤波受初值影响较大,收敛缓慢,强跟踪滤波与转换测量强跟踪滤波收敛相当,但精度存在一定差距,需长时间跟踪才能相当。

图6 3种算法的机动位置精度

图7 3种算法的机动速度精度
由图7和图8可知,在出现机动后,扩展卡尔曼滤波会进入长时间的恢复期,而强跟踪滤波与转换测量强跟踪滤波只需短暂适应即可,但强跟踪滤波恢复期精度差于转换测量强跟踪滤波器。转换测量强跟踪滤波器在机动过程中的位置滤波误差最大20.0 m,速度滤波误差最大3.0 m/s,滤波收敛后,位置滤波精度在5.0 m量级,速度滤波精度在0.5 m/s量级。

图8 STF滤波渐消因子变化图
对于整个过程当中相对机动的检测,通过渐消因子是否超过阈值来进行。三轴渐消因子的数据如图8所示。
从图8可以明显看到,在22 586(积日1950),83 854.81(积秒),滤波渐消因子发生跳变,理论机动时刻83 849.81(积秒),机动检测延时5 s。
4结论
本文针对提高航天器间的相对定位精度问题,提出一种基于强跟踪滤波器实现两航天器间近距离精确动态相对定位的算法,该算法将球坐标系下的雷达测量信息转换到直角坐标系,并估计出转换测量误差的二阶统计特性,最后通过强跟踪滤波器来处理。强跟踪滤波器是一种次优滤波,利用滤波过程中计算得到的渐消因子,强制改变一步预测协方差矩阵,可有效提高机动期间观测数据的利用率,具有很强的跟踪性能。仿真试验可得以下结论。
(1) 采用去偏转换测量后,强跟踪滤波算法可得到良好的跟踪效果;在相同观测条件下,跟踪误差没因为距离的增大而明显增大,与没有采用去偏转换得到的滤波结果比较,跟踪精度得到一定提高。
(2) 强跟踪滤波器适用于随机脉冲推力、小推力作用下的相对动态定位问题。对于脉冲推力情况,强跟踪滤波计算方案性能稳定,机动后恢复期较短,收敛速度快,滤波精度高;机动期间,位置平均误差小于10 m,速度平均误差小于1.5 m/s;非机动期间,位置平均误差小于5 m,速度平均误差小于0.5 m/s。对于小推力情况,其收敛速度相对较长,在相同时间内达到的滤波精度略低于脉冲推力情况。
(3) 强跟踪滤波器自身不需要机动检测,但其渐消因子的变化可作为机动的辨识统计量。在仿真中可发现,如果不考虑野值的影响,强跟踪滤波器可以实现瞬时检测,精确度高;但阈值的设置依赖于先验信息以及预先的仿真模拟调试。
后续工作主要考虑对强跟踪滤波参数的设置,包括机动检测阈值与渐消因子系数,可通过先验信息多次仿真计算获得最优值或者其他更加简便的优化系数的方法。
参考文献:
[1] Baek K, Bang H. Adaptive sparse grid quadrature filter for spacecraft relative navigation[J].ActaAstronautica, 2013, 87:96-106.
[2] Montenbruck O, D’Amico S.Distributedspacemissionsforearthsystemmonitoring[M].New York:Springer,2013:185-223.
[3] Hablani H B,Tapper M,Bashian D.Guidance and relative navigation for autonomous rendezvous in a circular orbit[J].JournalofGuidance,Control,andDynamics, 2002, 25(3):553-562.
[4] Kim S G,Crassidis J L,Yang C, et al. Kalman filtering for relative spacecraft attitude and position estimation[C]∥Proc.oftheAIAAGuidance,Navigation,andControlConferenceandExhibit, 2005.
[5] Pelletier F J, Golla D F. Lidar-based rendezvous navigation for MSR[C]∥Proc.oftheAIAA/AASAstrodynamicsSpecialistConferenceandExhibit, 2004.
[6] Liu Y,Xu S J,Xu P.Spacecraft relative navigation based on improved two step Kalman filtering[J].ChineseSpaceScienceandTechnology, 2011,31(3):20-25.(刘勇,徐世杰,徐鹏,基于改进型两步卡尔曼滤波的相对导航方法[J]. 中国空间科学技术,2011,31(3):20-25.)
[7] He Y Z. Rendezvous radar observation based relative navigation filter[J].AerospaceControl, 2004, 22(6):17-20.(何英资. 基于微波雷达测量的相对导航滤波器[J]. 航天控制,2004,22(6):17-20.)
[8] Wodffinden D C, Geller D K. Relative angles-only navigation and pose estimation for autonomous orbital rendezvous[J].JournalofGuidance,Control,andDynamics,2007,30(5):1455-1469.
[9] Zhou D H,Frank P M.Strong tracking filtering of nonlinear time—varying stochastic systems with colored noise:application to parameter estimation and empirical robustness analysis[J].InternationalJournalofControl,1996,65(2):295-307.
[10] Fan X J, Liu F, A new IMM method for tracking maneuvering target[J].JournalofElectronics&InformationTechnology, 2007,29(3):532-535.(范小军,刘锋. 一种新的机动目标跟踪的多模型算法[J]. 电子与信息学报,2007,29(3):532-535.)
[11] Hepner S, Geering H. Observability analysis for target maneuver estimation via bearing-only and bearing-rate only measurement[J].JournalofGuidance,Control,andDynamics, 1990,13(6):120-128.
[12] Lerro D, Bar-Shalom Y. Tracking with debiased consistent converted measurements versus EKF[J].IEEETrans.onAerospaceandElectronicSystem,1993,29(3):1015-1022.
[13] Lee D, Pernicka H. Vision-based relative state estimation using the unscented Kalman filter[J].InternationalJournalofAeronauticalandSpaceSciences,2011,12(1):24-36.
[14] Jia B, Xin M, Cheng Y. Sparse Gauss-Hermite quadrature filter with an application to spacecraft attitude estimation[J].JournalofGuidance,Control,andDynamics, 2011,34(2):367-379.
[15] Piotr S. Explicit expressions for debiased statistics of 3D converted measurements[J].IEEETrans.onAerospaceandElectronicSystems,1999,35(1):368-370.
[16] Pasha S A, Tuan H D, Vo B N. Nonlinear Bayesian filtering using the unscented linear fractional transformation model[J].IEEETrans.onSignalProcessing, 2010, 58(2):477-489.
[17] Spitzmiller J N, Reza R. Adhami, tracking with estimate-conditioned debiased 3-D converted measurements[C]∥Proc.oftheIEEEAerospaceConference, 2010:1-16.
黄普(1982-),男,工程师,硕士研究生,主要研究方向为飞行器控制系统的滤波。
E-mail:huangpu1982@163.com
钱山(1981-),男,工程师,博士,主要研究方向为航天器动力学与控制。
E-mail:qianshan_126@163.com
谢鑫(1984-),男,工程师,硕士研究生,主要研究方向为航天器动力学与控制。
E-mail:xxi_126@163.com
孙守明(1981-),男,工程师,博士,主要研究方向为航天器动力学与控制。
E-mail:ssm_126@163.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141120.2115.014.html
Dynamic relative positioning algorithm for maneuvering spacecraft
based on strong tracking filter
HUANG Pu, QIAN Shan, XIE Xin, SUN Shou-ming
(StateKeyLaboratoryofAstronauticDynamics,Xi’an710043,China)
Abstract:For the problem of precise dynamic relative positioning between maneuvering spacecraft, a dynamic relative positioning algorithm based on the strong tracking filter(STF) is proposed. In consideration of the difference among the three directions in relative maneuvering, a three-directions-filter is set up to avoid the decline of tracking accuracy due to the un-match between the one-direction-filter and the actual maneuver. For the tracking problem of the three-directions-filter under the Cartesian coordinate system, the converted measurement algorithm is presented, to overcome the deviation problem in the spherical coordinate system and Cartesian coordinate system conversion. Through simulation and analysis, it shows that, the algorithm is better than the other algorithms on initial value sensitivity and relative maneuvering recovery, and is suitable for spacecraft dynamic relative precise positioning in a variety of circumstances such as pulse thrust maneuvering, limited thrust maneuvering and so on.
Keywords:maneuvering spacecraft; relative positioning; strong tracking filter (STF); three-directions-filter; converted measurement
作者简介:
中图分类号:V 412.4
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.25
基金项目:国家自然科学基金(61302098)资助课题
收稿日期:2014-03-25;修回日期:2014-09-26;网络优先出版日期:2014-11-20。
