航天器三自由度模拟器自动配平
2015-02-18徐喆垚齐乃明孙启龙王田野
徐喆垚, 齐乃明, 孙启龙, 王田野
(哈尔滨工业大学航天学院, 黑龙江 哈尔滨150001)
航天器三自由度模拟器自动配平
徐喆垚, 齐乃明, 孙启龙, 王田野
(哈尔滨工业大学航天学院, 黑龙江 哈尔滨150001)
摘要:基于气浮球轴承的航天器模拟器广泛用于研究航天器的姿态动力学与控制,为了在地面模拟太空中的失重环境,必须将重力力矩的干扰减到最小。因此,模拟器的旋转中心要与气浮球轴承的中心重合。提出一种自动配平系统的设计方法,将姿态稳定控制作为系统的内回路,自动配平作为系统的外回路。通过姿态稳定控制,用反作用飞轮反馈的力矩信息,实时计算出模拟器质心位置。通过控制3个正交的配平系统,补偿质心位置偏差。根据实验测得的回路参数,优化设计配平系统控制律。将跟踪微分器应用于力矩信息处理,有效减少电机反复运动,提高配平效率。提出的配平方法成功用于航天器三自由度模拟器的实验中。
关键词:气浮轴承航天器模拟器; 三自由度; 重心估计; 自动配平
0引言
三自由度模拟器通过气浮球轴承模拟无摩擦和空间微重力环境。为了实现摩擦和空间微重力模拟,其关键技术之一就是保证模拟器平台质心与气浮球轴承的中心重合,消除重力力矩干扰。配平过程是一个反复调节的过程,人工配平[1]很难满足实验的精度要求,并且需要大量的时间。因此考虑采用自动配平的方式提高配平精度和效率。
要实现精确配平,首先需要计算模拟器的质心位置。通过计算机辅助设计(computer aided design,CAD)建模计算模拟器质心位置的方法,由于各元器件形状不规则,密度不均匀,并且系统的电线组件等模型复杂,CAD建模很难精确计算质心。
文献[2-7]应用最小二乘法对气浮球轴承模拟器进行参数辨识;文献[8]通过最小二乘法计算质心后,进行手动配平,但是配平过程需要反复调节来满足精度要求。而采用最小二乘法,多次计算质心,配平效率较低。文献[9]给出通过2个倾角传感器实现水平方向自动配平的方法。文献[10-11]提出在已知转动惯量的情况下,计算质心的方法。文献[12-13]等提出了自适应的自动配平控制算法,只需要在自动配平前对系统进行一次参数辨识。文献[14]等针对小模拟器又提出了只用配平电机无需其他执行机构的自动配平控制方法:水平方向采用自适应控制,竖直方向偏差通过参数估计补偿。
本文基于实际的工程应用提出一种简单有效的配平方法——内外回路控制的配平方法。内回路为姿态稳定控制回路,经过稳定控制,系统的质心位置计算方程可简化为3×3矩阵;外回路根据内回路的平衡力矩信息采用分步控制方式消除奇异影响,计算质心位置,实现实时的自动配平控制。整个配平过程计算无需辨识模拟器的转动惯量信息。
本文首先建立模拟器的动力学模型,通过对模型的分析,得出直接用飞轮输出力矩估计质心的方法,给出根据质心偏差量计算配平质量块移动距离的表达式。然后根据内外回路的设计思想,分别设计内回路的姿态控制和外回路的配平控制。引入自抗扰控制技术中的跟踪微分器(tracking-differentiator,TD)来减少电机反复运动现象。最后通过实验来验证该方法的可行性。
1模拟器动力学模型与质心计算
1.1卫星三自由度模拟器
航天器三自由度姿态模拟器由气浮球轴承和支撑机构实现模拟器的三轴自由转动,模拟器可实现绕偏航轴±180°旋转,俯仰和滚转±30°转动。星载计算机采用PC104作为控制中心机,扩展串口卡和继电器控制卡,实现模拟器的配平控制以及姿态控制。无线通讯设备用于实现星载计算机与地面控制系统的无线通信。
模拟器上装有3个反作用飞轮,飞轮主轴分别沿着模拟器体轴的3个方向安装,采用RS422串口通讯方式,飞轮最高转速6 100 r/min,飞轮转动惯量0.003 21 kg·m2。反作用飞轮可工作在转矩模式或转速模式,实现姿态控制主要采用力矩模式。反作用飞轮的输出力矩可通过串口通讯反馈给控制系统。力矩最大输出0.1±0.004 Nm。如图1所示。
模拟器上装有光学标志器,采用(light emitting diode,LED)光源,发射光波长是880 nm,散射角可以达到90°。通过视觉测量相机捕捉模拟器姿态信息,测量随机误差小于0.01°,频率可达20 Hz。
模拟器上的惯性导航设备,可提供模拟器的角速度信息,采用RS232串口通讯,数据更新速率100 Hz,零偏0.03(°)/s。
自动配平系统由3个步进电机驱动配平质量块组成,在模拟器的体坐标系的3个方向垂直安装3个调平机构,实现对模拟器质心在空间3个方向的独立调节,如图2所示。

图2 自动配平机构
1.2模拟器的动力学方程
自动配平系统主要靠移动配平质量块实现对模拟器质心位置的调整,配平质量块在空间上的分布要求实现模拟器质心可在三维空间任意方向调节,比较简单的方式是沿着平行于模拟器体坐标系轴向方向分布,如图2所示。模拟器体坐标系的原点在模拟器的旋转中心,z轴向上为正方向,x,y轴与z轴正交分布。模拟器的姿态角通过相机测量,相机坐标系相对地面静止,z轴竖直向上。


(1)

整个模拟器关于旋转中心的角动量H为
(2)
将模拟器视为刚体,并且在整个配平过程中,质量块的移动速度都是相对缓慢的,则式(2)可简化为
(3)

图3 角动量矢量图
(4)

(5)

(6)
模拟器的欧拉方程为
(7)
式中,R为质心的位置矢量。该式即为模拟器的转动动力学方程。

(8)
(9)
若飞轮按体坐标系的3个轴向分布,Twx,Twy,Twz分别对应3个飞轮的输出力矩。由于方程左边不可逆,不能直接用于质心位置计算,文中提出将水平方向和竖直方向配平分离的方式实现质心计算。
同时给出模拟器的姿态运动学方程为
(10)
式中,ωx,ωy和ωz为角速度矢量ω在体坐标系下的分量。
1.3配平质量块移动量与模拟器质心关系
计算模拟器的质心时,应包括模拟器主体ms(包括冷喷气等执行结构)、配平质量块mmi(i=1,2,3)以及反作用飞轮mwi(i=1,2,3),则模拟器总质量为
(11)
质心位置可通过式(12)求得

(12)
当质量块移动距离di(i=1,2,3)后,模拟器的质心变为
(13)
质心的变化量为
(14)
配平过程就是通过移动配平质量块,使新偏移量ΔR=-R,整个模拟器质心将于位于旋转中心(即气浮球轴承中心)。将各矢量在模拟器体坐标系下表示,配平质量块所需的移动距离表达式如下,“-”号表示方向:
(15)
2模拟器自动配平控制系统设计
根据式(7)~式(9)可知,实现质心计算的前提是模拟器保持姿态稳定,角速度和角加速度近似为零。因此,在实现自动配平控制前首先要设计模拟器的姿态稳定控制。
2.1模拟器稳定控制系统
为实现配平控制,设计了姿态稳定控制系统。航天器三自由度模拟器姿态稳定控制是指通过控制飞轮实现模拟
器姿态保持,其控制回路设计如图4所示。
通过外部视觉测量系统和模拟器上的惯性导航原件,确定模拟器各姿态角和角速度信息,并反馈给控制器。控制器制定控制策略控制飞轮输出力矩,克服偏心重力力矩干扰,保持模拟器姿态角度的稳定。

图4 稳定控制回路
将式(7)在体坐标中表示为
(16)
将式(10)和式(16)写成状态方程的形式,有
(17)
式中
(18)
(19)

(20)
滚转角通道简化为二阶积分环节,其他两角的控制回路仍做姿态稳定控制,克服重力力矩和耦合项干扰。
针对以上2种情况,由于各姿态控制回路均可近似为积分环节,因此可对各回路设计比例-微分(proportion-differentiation, PD)控制器。设e(t)为各控制回路的角度偏差,则各控制回路的控制律u为
(21)
姿态控制效果如图5所示。稳定控制系统是配平控制系统的姿态稳定内回路,配平控制是外回路,对于姿态稳定控制,给定的姿态角是输入量,重力力矩R×mg是干扰项。而对于配平控制外回路,通过控制电机调整模拟器质心,重力力矩R×mg是控制量,飞轮的输出力矩是量测量,需将内回路变换为偏心力矩输入量的形式,如图5所示。

图5 稳定控制内回路
2.2自动配平控制系统设计
由式(13)求出质心位置后,根据式(4)求出配平质量块所需的移动距离,配平质量块移动后,模拟器中配平系统的转动惯量变化,配平质量块对旋转中心的转动惯量在体坐标系下表示为
(22)
式中,[rmi]为rmi在体坐标系下的分量形式;[rmi]×为其叉乘矩阵。在移动di后,转动惯量变为
(23)
同时移动质量块引起偏心力矩的变化,进而稳定控制系统继续平衡新力矩,使系统重新稳定,然后开始下一个自动配平周期。稳定控制系统是快速响应过程,而配平控制系统是慢响应过程。
自动配平前,首先进行初步的人工配平,将质心配到自动配平系统控制范围之内。由于式(9)的矩阵奇异,因此在配平控制中,采用分离控制消除奇异影响。
将模拟器转到水平位置附近(z轴转角也为0),先配x和y方向。姿态稳定后,此时方程(9)简化为
(24)
根据输出的力矩反馈,计算质心x、y方向的位移,自动配平水平方向的质心偏差。水平方向的质心配好后,此时重心矢量沿着-z方向,Rx≈0,Ry≈0。然后绕y(或x)轴倾斜机动一定角度ϑ,姿态稳定后,式(9)变为
(25)
即mgzsin ϑ·Rz=Twy,计算z方向的质心偏差。同时从该式可以看出,在水平方向配平时,即使有小角度倾斜,z向质心偏差的影响也是很小的。配平控制回路如图6所示,0表示希望的质心位置,电机移动改变重力力矩R×mg,对模拟起内回路产生影响。

图6 自动配平控制回路
2.3跟踪微分器
跟踪微分器[15]通过对微分功能函数的改进,更适用于离散系统,其基本形式为
(26)
其中
u=fhan(xa,xb,r,h0)
(27)
式中,函数fhan(xa-v,xb,r,h0)为离散系统的最速控制综合函数;v为输入信号(力矩)。xa,xb为系统状态变量;r为跟踪速度;h为步长。跟踪微分器不仅可以使输入曲线变得平滑,并且可以通过调整参数h0来抑制信号噪声。
将反馈的力矩信息通过该式滤波后,状态量xa为力矩的滤波值,xb为力矩的微分信息,将信息反馈给配平控制回路,计算质心位置并实现配平控制。
3实验
3.1参数优化
3个配平控制回路解耦后,可分开单独设计考虑。以y方向配平控制为例,控制回路可简化为图7。

图7 自动配平控制简化回路
模拟器和配平质量块的质量可预先测得,如表1所示。

表1 模拟器和配平质量块的质量
将电机模型简化成惯性环节,选择PD控制作为配平控制方式设计控制律。对设计的PD控制律的参数,进行计算机仿真验证和参数优化。优化采用绝对误差乘时间的积分(integrated product of time and absolute error, ITAE)指标,减少调节时间。给定初始质心偏差6×10-5m,通过参数优化得到PD控制参数为:Kp=0.265 2,Kd=4.524 7。优化后的配平控制仿真如图8所示。

图8 质心配平仿真优化
5 s时开始配平控制,13 s时完成配平,重力力矩变为零,从仿真结果看出,提出的配平方法快速、准确。
3.2水平方向质心配平
对于内回路控制系统,相机测量和反作用飞轮力矩输出都有一定不确定性,以及力矩测量存在量测噪声,配平过程要对力矩信息进行处理。
在姿态控制开始时,模拟器的起始姿态位置并不在期望位置,需要对姿态进行调整。由于反作用飞轮的执行能力和容量限制,需对内回路的姿态稳定控制设计轨迹优化,避免反作用飞轮出现快速饱和现象。试验中,姿态稳定控制采用所设计的PD控制。人工配平后姿态稳定控制如图9所示。
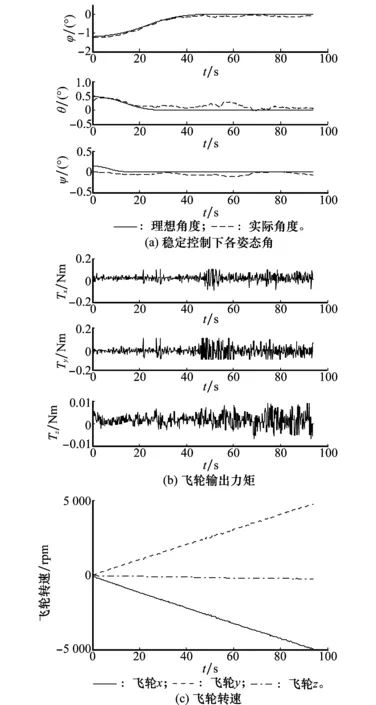
图9 配平前的姿态保持
从角度跟踪曲线可以看出,姿态稳定控制精度可以达到0.3°。姿态稳定过程中,飞轮x和y为了克服重力干扰力矩,迅速达到饱和转速值,重力干扰力矩在z方向上无力矩分量,飞轮z转速为0。而从控制力矩信息可以看出,力矩值存在很大波动,不能直接应用,因此试验中将每10次测量的力矩信息取平均值传给配平控制回路,如图10所示。

图10 力矩均值水平配平控制
模拟器达到水平位置后,开始配平控制,配平过程中的力矩均值如图10(d)所示。
从力矩输出曲线看出,由于飞轮精度较低,无法直接应用力矩信息。从力矩均值看出干扰力矩最终稳定在±0.01Nm之内。未采用配平控制之前,x,y飞轮转速快速上升,配平开始后速度不再增大,并趋于平稳。从力矩均值滤波图可以看出,即使采取均值滤波,力矩信息仍有快速波动,造成配平时电机反复运动,降低了配平效率。鉴于跟踪微分器TD的滤波作用,并且可以获得力矩的微分信息,减小超调量,增强配平控制效果,对力矩信息采用TD滤波。实验中r=20,h0=5,采用TD后的水平配平过程曲线如图11所示。

图11 力矩TD水平配平控制
输出力矩的TD滤波值如图11(d)所示,配平控制根据滤波信息控制电机转动,图中直线部分是不进行配平阶段,无滤波值。
从滤波值可以看出,配平刚开始时,重力力矩较大,通过移动质量块,重力力矩减小,之后飞轮的平衡力矩在小范围波动。
3.3竖直方向质心配平
水平方向配平完成后,实现竖直方向配平。竖直方向未配平前,控制模拟器绕y轴转动,目标值10°,转动过程如图12所示。

图12 竖直方向未配平时转动控制
模拟器在转到x轴角期望位置后,飞轮x转速基本保持不变,即x轴方向重力干扰力矩趋于0。而飞轮y转速随着y轴转角的增大加速增大,还未达到10°就趋于饱和。
模拟器到达指定位置稳定后,才能开始配平。为了防止初始质心位置偏差较大,飞轮快速饱和,竖直配平采取分段过程,先旋转小角度,根据式(25),力矩相对较小,不会饱和,开始配平控制,初步减小质心与旋转中心的偏差。然后继续旋转大角度,放大剩余偏差,提高配平控制精度,完成配平。图13中的试验,先控制模拟器绕y轴旋转5°,保持姿态稳定,执行初步配平。待转速不再快速上升后,再将模拟器旋转到20°保持姿态,继续完成配平。飞轮转速在配平后趋于平缓。

图13 力矩均值竖直方向配平控制
滚转角实际跟踪曲线与理想曲线基本重合,飞轮转速开始时正向快速增加,在第1次配平后转速变化平缓,但随着角度继续增大,飞轮转速反向增加,说明第1次配平后,质心已经调节到相反方向。配平过程的飞轮y力矩均值如图13(d)所示。
对竖直方向采用TD滤波配平过程如图14所示。模拟器绕y轴转动到5°后开始初步配平,图中a段为初配平阶段,飞轮输出力矩开始减小,减小过程平滑无波动。飞轮转速平缓后,机动到20°时,开始第2次配平(图中b段),最后力矩估计值在0附近小范围波动。
采用TD滤波的竖直配平过程中,配平时间明显减少(图中a段和b段),并且a、b段无反复波动现象,之后力矩值在0.001 5范围内波动。
文献[12]采用控制力矩陀螺的自适应的自动配平方法,给出了配平后4个姿态的重力力矩值,如表2所示。
从本文的水平和竖直配平输出力矩的直接测量信息可知,配平后的最终干扰力矩稳定在0.05Nm以下,从力矩均值曲线看出,最后的干扰力矩在0.02Nm以下,TD滤波值可达到0.005Nm以下,本文提出的自动配平方法提高了配平精度。

图14 力矩TD竖直方向配平控制
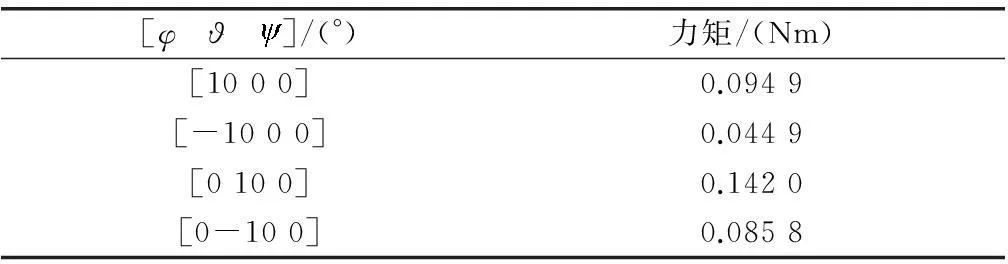
[φϑ]/(°)力矩/(Nm)[1000]0.0949[-1000]0.0449[0100]0.1420[0-100]0.0858
但是即使增加配平时间,也很难进一步减小干扰力矩,分析原因主要包含以下几项:由于实验环境中气流的影响、气浮轴承涡流现象,模拟器上的柔性电缆等各种各样不确定力矩干扰;模拟器上各测量元件的误差、噪声,姿态稳定过程中的不平衡,3个正交配平电机不严格垂直,飞轮转子偏心等会对配平精度产生影响。提高各测量元件和执行机构的精度可进一步提高配平精度。
4结论
文中提出的航天器模拟器自动配平方法,实现模拟器质心的计算,并通过调整配平机构,使模拟器质心趋近于旋转中心,减小重力力矩干扰。通过动力学建模分析,设计以姿态稳定控制为内回路;根据内回路反馈的稳定力矩,计算质心位置;配平控制外回路在特定角度的姿态稳定下进行配平,实现对3个方向的配平解耦,整个控制过程无需模拟器的转动惯量信息。采用TD滤波方法提高配平效率,减小电机反复运动现象。通过实验验证了提出的配平方法的有效性,实时在线自动配平相对于人工配平、参数辨识等方法提高了配平效率和精度。
参考文献:
[1] Fullmer R R. Dynamic ground testing of the skipper attitude control system[C]∥Proc.ofthe34thAIAAAerospaceSciencesMeeting&Exhibit, 1996:15-18.
[2] Schwartz J L, Hall C D. System identification of a spherical air-bearing spacecraft simulator[J].AASPaper, 2004, 122.
[3] Schwartz J L. The distributed spacecraft attitude control system simulator:from design concept to decentralized control[D]. Blacksburg:Virginia Polytechnic Institute and State University, 2004.
[4] Kim B M, Velenis E, Kriengsiri P, et al. A spacecraft simulator for research and education[C]∥Proc.oftheAIAA/AASAstrodynamicsSpecialistsConference, 2001(01-367):897-914.
[5] Jung D, Tsiotras P. A 3-dof experimental test-bed for integrated attitude dynamics and control research[C]∥Proc.oftheAIAAGuidance,NavigationandControlConference, 2003.
[6] Keim J A, Behcet A A, Shields J F. Spacecraft inertia estimation via constrained least squares[C]∥Proc.oftheIEEEAerospaceConference, 2006.
[7] Wright S. Parameter estimation of a spacecraft simulator using parameter-adaptive control[D]. Blacksburg:Virginia Polytechnic Institute and State University, 2006.
[8] Wilson E, Mah R W, Guerrero M C, et al. Imbalance identification and compensation for an airborne telescope[C]∥Proc.oftheIEEEAmericanControlConference, 1998, 2:856-860.
[9] Prado J, Bisiacchi G, Reyes L, et al. Three-axis air-bearing based platform for small satellite attitude determination and control simulation[J].JournalofAppliedResearchandTechnology, 2005, 3(3):222-237.
[10] Li Y, Gao Y. Equations of motion for the automatic balancing system of 3-DOF spacecraft attitude control simulator[C]∥Proc.ofthe3rdIEEEInternationalSymposiumonSystemsandControlinAeronauticsandAstronautics, 2010:248-251.
[11] Li Y B, Bao G, Wang Z W, et al. Dynamic modeling for automatic balancing system of 3-DOF air-bearing testbed[J].JournalofChineseInertialTechnology, 2006, 13(5):82-86.(李延斌, 包钢,王祖温,等.三自由度气浮台自动平衡系统动力学建模[J].中国惯性技术学报,2006,13(5):82-86.)
[12] Kim J J, Agrawal B N. Automatic mass balancing of air-bearing-based three-axis rotational spacecraft simulator[J].JournalofGuidance,Control,andDynamics,2009,32(3):1005-1017.
[13] Kim J J, Agrawal B N. System identification and automatic mass balancing of ground-based three-axis spacecraft simulator[C]∥Proc.oftheAIAAGuidance,Navigation,andControlConferenceandExhibit, 2006:21-24.
[14] Chesi S, Gong Q, Pellegrini V, et al. Automatic mass balancing of a spacecraft three-axis simulator:analysis and experimentation[J].JournalofGuidance,Control,andDynamics, 2013, 37(1):197-206.
[15] Han J Q.Activedisturbancerejectioncontroltechnique[M]. Beijing:National Defense Industry Press, 2008:46-97.(韩京清.自抗扰控制技术[M]. 北京:国防工业出版社,2008:46-97.)
徐喆垚(1988-),男,博士研究生,主要研究方向为飞行器动力学与控制。
E-mail:xzydtc@126.com
齐乃明(1962-),男,教授,博士,主要研究方向为飞行器动力学与控制、机电一体化。
E-mail:qinmok@163.com
孙启龙(1989-),男,硕士研究生,主要研究方向为飞行器制导与控制技术。
E-mail:qilongsunwudi@163.com
王田野(1990-),男,硕士研究生,主要研究方向为飞行器制导与控制技术。
E-mail:wang878552527@126.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141120.2113.012.html
Automatic mass balancing of three-axis rotational spacecraft simulator
XU Zhe-yao, QI Nai-ming, SUN Qi-long, WANG Tian-ye
(SchoolofAstronautics,HarbinInstituteofTechnology,Harbin150001,China)
Abstract:Spherical air-bearing-based spacecraft simulators are widely used to research spacecraft attitude dynamics and control techniques. To simulate the microgravity environment for the ground spacecraft simulators, the effects of the torque of gravity should be minimized. So, the center of rotation of the spacecraft simulator should be exactly aligned with the center of gravity. This paper presents an automatic mass balancing method. The attitude stability control is designed as an inner loop of the system, and automatic mass balancing is designed as the outer loop of the system. When the system is stable, the position of the center of gravity is calculated by the output torque of the reaction wheel. Then three proof masses on linear motion stages are actuated to compensate for the center of gravity offset from the center of rotation in real time. The control law is designed using parameter optimization based on the parameters of the loop which are measured by the experiment. The tracking-differentiator is applied to torque information processing, which effectively reduces motor moving repeatedly and improves the efficiency of automatic mass balancing. The method is successfully implemented in three degrees of freedom spacecraft simulation experiments.
Keywords:air-bearing-based spacecraft simulators;three degrees of freedom;estimation of the center of gravity;automatic mass balancing
作者简介:
中图分类号:V 416
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.23
基金项目:国家自然科学基金(61171189)资助课题
收稿日期:2014-05-19;修回日期:2014-10-16;网络优先出版日期:2014-11-20。
