基于结构熵和IGSO-BP算法的动态威胁评估
2015-02-18陈洁钰姚佩阳税冬东
陈洁钰, 姚佩阳, 王 勃, 税冬东
(空军工程大学信息与导航学院, 陕西 西安 710077)
基于结构熵和IGSO-BP算法的动态威胁评估
陈洁钰, 姚佩阳, 王勃, 税冬东
(空军工程大学信息与导航学院, 陕西 西安 710077)
摘要:针对传统超视距空战威胁评估不能根据各类威胁因素的变化动态调整其对应权值的问题,引入前向反馈(back propagation, BP)神经网络,采用综合考虑主客观因素的结构熵权法确定各威胁指数权值并作为神经网络训练参数进行训练,提出了改进萤火虫算法(improved glowworm swarm optimization, IGSO)和BP神经网络相结合的空战动态权值计算方法。该算法采用改进萤火虫算法优化BP网络的权值和阈值,优化后的BP网络能更好地计算不同态势下的威胁指数权值,从而根据威胁估计模型进行威胁评估。以某一时刻预测多无人机空中对抗时的威胁度为想定,分别采用结构熵权法和IGSO-BP进行仿真计算。结果表明:结构熵权法能够科学合理地计算各威胁指数权值,IGSO-BP算法可有效解决空战目标威胁评估问题,且所提算法与现有几种算法相比在可靠性和准确性上都有明显提高。
关键词:BP神经网络; 萤火虫算法; 结构熵权法; 动态权值; 威胁评估
0引言
随着高新技术的不断应用,战争样式的不断翻新,多机协同超视距空战逐渐发展成为现代空战主要战斗方式之一。战争的智能化、信息化使现代空战面临作战节奏加快、作战手段突变性强、对抗强烈等新的挑战。因此,如何全面掌握当前战场态势,准确、迅速、及时地反映战场态势的变化并做出威胁判断使其更适合复杂多变的空战环境是一个极具理论价值与现实意义的问题。
威胁估计是多无人机协同作战中的一项重要内容,能够为武器分配和兵力部署提供基本依据。至今,国内外许多学者从理论体系和系统实现方法上进行了大量探索性的研究和开发,提出了很多威胁估计方法。文献[1]针对不确定信息下的目标威胁估计问题,提出了基于博弈论的威胁估计的解决方法。文献[2]采用目标驱动的本体分析方法有效解决了海战场的威胁估计和火力分配问题。文献[3]提出了基于模糊贝叶斯网络的有人机/无人战斗机编队对地威胁评估方法,并验证了该方法的实时性。文献[4]提出了一种基于多属性决策理论的威胁估计方法,该方法能有效提高防空作战效能。
然而,目前大部分威胁估计采用常权向量综合方法,不能很好地映射威胁因素间复杂的关系,难以适时反映出由于敌空战性能及战术手段的变化带来的各因素权值的变化。本文针对超视距空战威胁估计模型中静态权值方法的缺陷,采用主客观赋值相结合的“结构熵权法” 求取神经网络训练参数,设计改进萤火虫算法优化BP神经网络,实现优化后的神经网络对各威胁因素权值的动态预测。
1空战目标威胁估计模型
在多无人机协同空战的目标威胁估计中,往往要考虑地理环境、天气情况、敌方意图、武器性能和作战手段等诸多因素。但在实际空战情况下,随着目标的灵活性和所携带武器杀伤力的增加,要求充分利用各种探测、跟踪装置尽早探测和识别目标,及时掌握敌方信息并给出预警,从而采用合理的方法对敌机对我机所造成的威胁程度做出正确估计。
随着超视距空战这一新的作战样式的出现,传统的参考近距空战威胁估计模型[5]的方法已无法完全反应超视距空战作战样式的特点。因此,本文基于对空空导弹攻击区的分析,评估和构造新的威胁函数,改进超视距空战威胁估计模型。
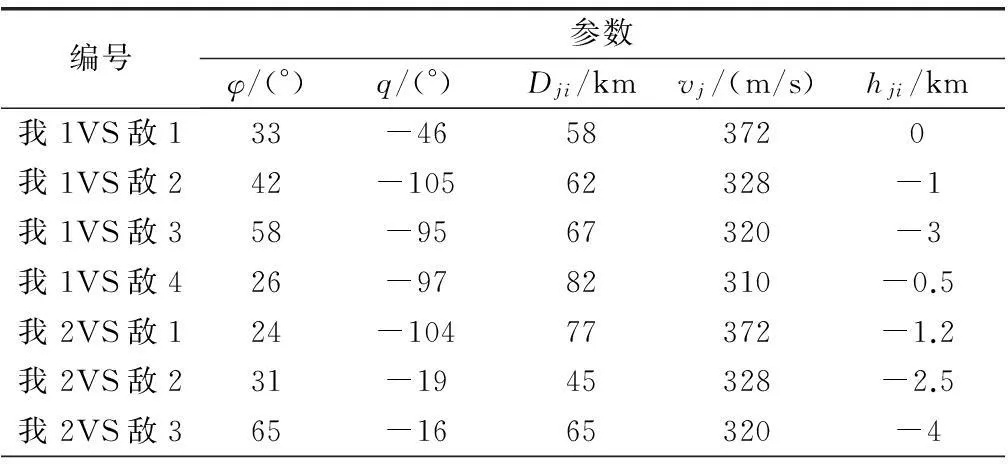
空战双方态势关系如图1所示。图中:Dji为双机的目标线,即敌方战机Tj与我方战机Ui的连线;hji为敌我战机的高度差;vi为我方战机速度矢量;vj为敌方战机速度矢量;φ为我方战机Ui的方位角;θ为敌方战机Tj的方位角;q为我方战机Tj的进入角。上述角度的方向一致规定为相对目标线右偏为正,左偏为负,则有0≤|φ|≤π,0≤|θ|≤π。
图1 空战双方态势关系
由于超视距空战对机载武器、雷达设备具有更高的要求,因此在超视距空战威胁估计中,除了考虑飞机性能、空战双方瞬时态势外,还应研究机载导弹攻击区、不可逃逸区以及机载雷达的搜索区等决定中远距空空导弹及机载雷达的性能的参数。

(1) 距离威胁函数
文献[6]认为距离对威胁的影响主要反映在雷达发现概率和导弹杀伤概率上,即在机载雷达有效探测距离内雷达的发现概率随距离的增大而降低,从而导致距离威胁降低;对于导弹杀伤概率[7],导弹杀伤概率在攻击区中间(不可逃逸区)内较大,而在攻击区最近和最远界附近较小且变化较快。因此,将敌我之间的距离Dji分为雷达最大探测距离DRmax、导弹最大最小攻击距离DMAmax、DMAmin导弹最大最小不可逃逸区距离DMEmax、DMEmin。
构造距离威胁函数
(1)
(2) 角度威胁函数
方位角威胁函数:
(2)
式中,φRmax为敌机雷达最大搜索方位角;φMAmax为敌机空空导弹最大离轴发射角;φMEmax为不可逃逸区圆锥角。
进入角威胁函数:
(3)
由此得角度威胁函数为
(4)
式(4)中,0≤a1,a2≤1为权重系数,用于衡量方位角和进入角的重要程度,本文取a1=a2=1。
(3) 速度威胁函数
(5)
(4) 高度威胁函数
(6)
(5) 空战能力威胁函数
飞机的空战能力用于空战有关的7个主要因素来衡量,空战能力指数[8]如下:
(7)
式中,B为机动性参数;A1为火力参数;A2为探测能力参数;ε1为操纵性能系数;ε2为生存力系数;ε3为航程系数;ε4为电子对抗系数。C的值可通过查表得到,在综合考虑敌我双方空战能力的基础上构造空战能力威胁函数有
(8)
综合考虑敌机空战能力和空战态势威胁指数求解综合威胁指数,由直接线性加权法得到
(9)
式中,Tji表示敌方第j架无人机对我方第i架无人机的综合威胁指数;ωi(i=1,2,…,5)表示各个威胁指数的权值,反映了各个威胁指数在综合威胁指数中的重要程度,其值的大小直接关系到每个威胁指数对总威胁指数的贡献。因此,确定各威胁指数的权值是进行威胁估计的必要前提。
2改进萤火虫优化算法
2.1萤火虫优化算法
萤火虫优化(glowwormswarmoptimization,GSO)算法是通过模拟自然界中萤火虫成虫发光这一群体行为提出的一种新型的基于群体搜索的随机优化算法[9]。其仿生原理[10]是:将搜索空间中的点模拟为萤火虫个体,每只萤火虫个体携带各自的荧光素,荧光素值的大小能够衡量个体位置的优劣,即所求解的优劣;同时每个个体都拥有自己的感知范围,也称为决策范围。个体只能在一定的感知范围内寻找优秀个体(荧光素值大的个体),进而向其移动。通过重复选择移动,最终实现在搜索空间内的寻优。
GSO算法主要包括初始化萤火虫、萤光素更新、移动概率更新、位置更新和决策域范围更新5个阶段,具体描述如下。
(1) 在搜索空间(即问题求解空间)内随机分布n只萤火虫,每只萤火虫个体代表问题求解空间中的一个解。每只萤火虫i(i=1,2,…,N)在其所在位置xi(t)的荧光素值为li(t),对应的目标函数值为f(xi(t))。
(2) 由于荧光素值的更新与求解目标函数f(xi(t))的值相关,故根据式(10)将目标函数值转化为荧光素值
(10)
式中,ρ∈[0,1]为荧光素挥发系数;γ∈[0,1]为荧光素更新率。
(3) 每个萤火虫个体在自己的决策范围内寻找到比自己荧光素值大的所有个体组成其邻域集合,根据式(11)计算萤火虫个体i向个体j的移动概率pij,有
(11)
式中,Ni(t)为t时刻萤火虫i的邻域集合,j∈Ni(t)。
(12)
式中,‖x‖表示x的范数。
(4) 萤火虫个体根据邻域中所有个体的荧光素值大小选择移动方向,由式(13)对萤火虫的位置进行更新:
(13)
式中,s为移动步长。

(14)

2.2改进的萤火虫优化算法
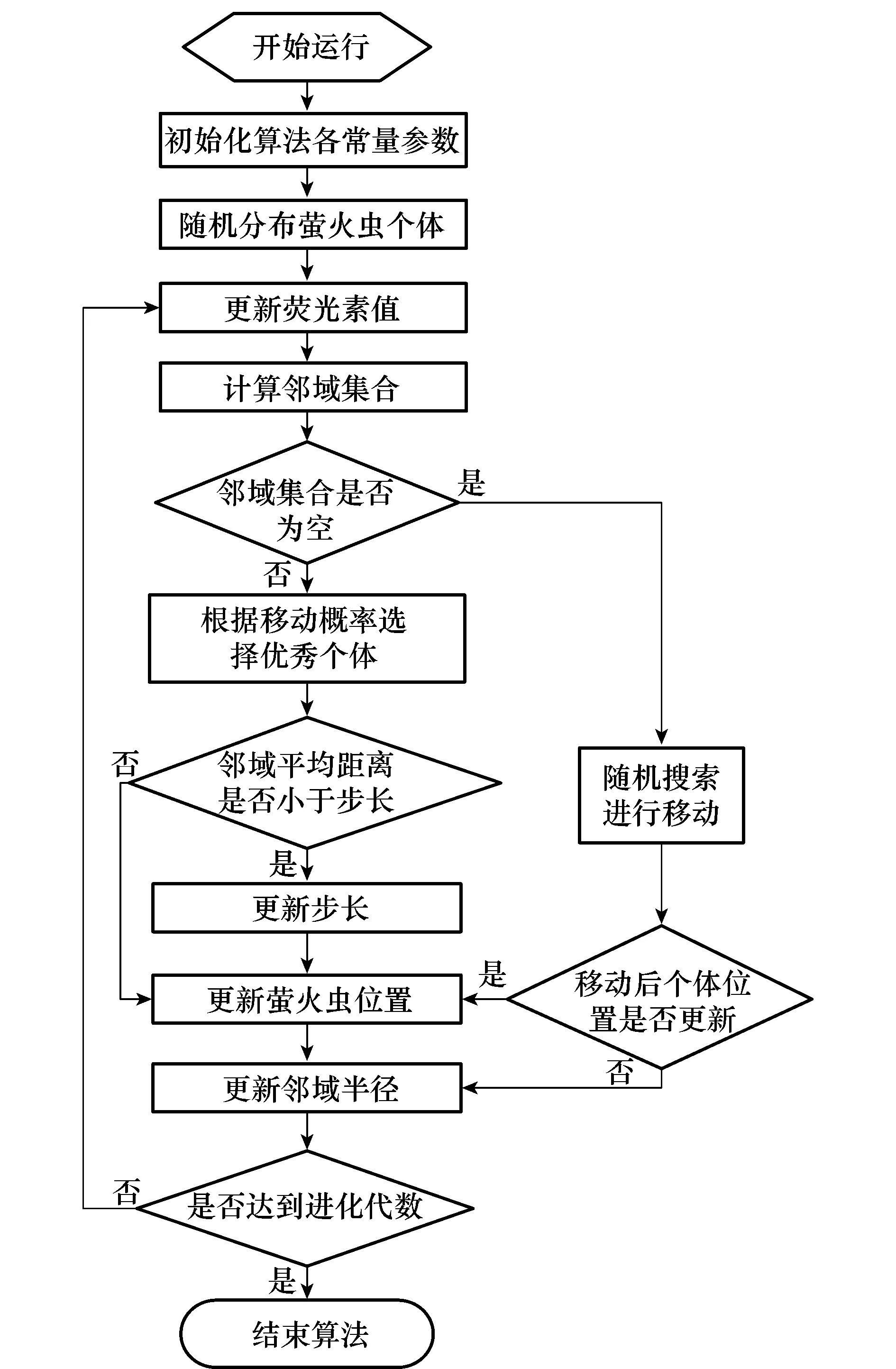
GSO算法具有较强的全局寻优能力和局部搜索能力,并且实现简单,但仍存在收敛速度慢,求解精度低等缺点,针对上述缺点,对基本GSO算法进行改进。
基本的GSO算法中,若萤火虫个体的邻域集合为空,个体会停止移动,从而减慢收敛速度;若邻域集合不为空时,萤火虫个体在决策范围内寻优的过程中,随着迭代次数不断增加,又会出现个体与峰值间的距离逐渐缩小直至小于固定移动步长s的情况,从而引起峰值附近的震荡,导致算法收敛速度减缓、求解精度降低,针对上述分析,提出以下改进措施。
首先,在个体邻域为空时,以萤火虫个体为中心按式(15)移动,若更新后的位置优于移动前的位置,则保留更新后的位置,否则不更新。
(15)
其次,个体邻域非空时,随着迭代次数的增加,按式(16)计算个体与邻域集合内其他个体间的距离,若平均距离小于固定移动步长,则增加步长更新机制缩小步长,按式(17)更新步长;否则不更新。
(16)
(17)
式中,n(0 通过上述改进,能够提高算法的局部搜索能力,收敛速度和求解精度。改进萤火虫算法(improvedGSO,IGSO)的执行流程如图2所示。 3基于IGSO算法的BP神经网络优化 前向反馈(backpropagation,BP)神经网络[11]的性能决定于网络的参数,即网络权值和阈值,因此合理选择初始权值和阈值十分重要。若选择不当会造成训练过程收敛速度慢,网络的最佳逼近性能降低。萤火虫优化算法是一种新型的基于群智能的进化计算技术,具有算法简单、易于实现、参数少、收敛速度快等优点。将IGSO算法用于神经网络训练学习,得到最优的权值和阈值,从而构造BP神经网络,提高神经网络训练算法收敛速度、泛化性能以及数据预测准确性。IGSO算法优化BP神经网络的过程如图3所示。 图2 IGSO算法流程 图3 IGSO算法对BP神经网络的优化过程 利用IGSO进行BP参数优化的具体优化步骤如下。 (1) 初始化。初始化BP神经网络结构及其初始权值和阈值;利用IGSO算法对初始值进行编码,使得IGSO算法中的每个萤火虫个体都包含BP神经网络的输出层与输入层、输入层与隐含层的权值以及隐含层阈值和输出层阈值。 (2) 将BP网络的训练误差作为萤火虫个体的适应度值,根据式(18)计算适应度值。 (18) 式中,n为BP网络输出层节点数;k为系数;yi,Oi分别为第i个节点的实际输出值和期望输出值。 (3) 执行IGSO算法部分优化BP网络,得到最优的网络权值和阈值。 (4) 将所得权值和阈值带入BP神经网络,选取合适的训练数据进行网络训练。 (5) 计算训练误差,直至误差满足条件结束训练,得到优化后的BP神经网络。 4基于IGSO-BP的动态威胁评估 在多无人机协同空战目标威胁评估的指标体系中,随着空战态势的变化,各威胁要素对威胁评估产生的作用、影响不是一成不变的。因此,需要不断调整各指标的权值大小使其更合理地反应各指标的重要程度。目前,采用层次分析法[12]确定各因素的权值是最广泛的威胁评估方法。这种方法确定的权值通常需要专家根据经验给出,并且是固定不变的,具有很大的主观性与盲目性,它忽略了实际战场环境中的各因素变化产生的影响,往往无法反映真实情况。因此,需要一种与现代空战动态变化特点相适应的权值确定策略。 4.1基于结构熵的训练参数优化 为了弱化层次分析法确定权值的主观性和不确定性,得到更合理的各威胁指数权值即神经网络的训练输出数据,本文引入了一种将主观赋值法与客观赋值法相结合的“结构熵权法”[13],它将德菲尔专家调查法和模糊决策分析方法相结合,采取主观评估法由相关专家根据主观经验对指标的重要性进行评估,运用客观的结构熵权法对主观评估值的不确定性定量分析,计算熵值并“盲度”分析,从而得出各指标的权值。 采用 “结构熵权法”[14]优化神经网络训练参数的具体步骤如下。 步骤 1通过咨询、收集专家意见,形成“典型排序”。 通过向该领域专家、学者进行请教与咨询,参考相关文献与资料,评价各威胁指数的重要程度,如表1所示,最终形成“排序意见”。设共有k个专家参加咨询调查,各威胁指数构成一个指标集,记为T={T1,T2,T3,T4,T5}={Tc,Ta,Tr,Tv,Th},每个专家对各威胁指数做出评价,获得各类威胁指数评估权值矩阵记为A(A=aij)k×5。式中,i=1,2,…,k;j=1,2,…,5;aij表示第i个专家对第j个威胁指数Tj的评价。 表1 专家意见评估表 步骤 2根据信息熵函数F(x)=-λq(x)ln(q(x)),对上述专家意见进行定性转化,即计算各专家指标的隶属度。 (19) 两边同除q(x),令 则 (20) x(x=1,2,…,j,这里j=5)为专家对各指标评估后得出的定性排序数,m为转化参量数,取m=j+2,即m=7,D(x)为x对应的隶属函数值,构造隶属度矩阵D: 式中,dij(1≤i≤k,1≤j≤5)表示专家i对第j个指标评估的隶属度值。 步骤 3对由专家意见形成的排序进行盲度分析,优化由不确定性导致的偏差。 首先计算k个专家对指标Tj的“一致看法”,称为平均认识度,记为dj,令 定义专家对因素Tj由认知产生的不确定性,称为“认识盲度”,记作Qj(Qj>0),令 (21) 对于每一个指标Tj,定义k个专家关于指标Tj的总体认识度记作μj(μj>0),有 (22) 步骤 4对μj进行归一化处理 (23) 4.2IGSO-BP在威胁估计中的应用 采用IGSO算法优化BP神经网络得到最优的权值和阈值后,选择合理的训练参数,通过结构熵权法优化神经网络的输出训练参数,通过网络学习训练实现动态权值的求取,进而进行目标威胁度计算。 基于IGSO-BP神经网络超视距空战动态威胁评估的步骤如下。 步骤 1确定输入训练参数及其变化范围。 输入参数为敌我无人机间的距离、高度差、速度比、敌无人机机载导弹的攻击距离和我方无人机的方位角。通常以飞行员的视距作为界限[15]来分,一般以敌我战机间的距离为10km为标准,将使用空空导弹进行的空战划分为两类:10km内的视距内的空战即近距作战和10km以外的超视距空战,该模式下又分为中距空战和远距空战。不同的空战模式下,各个威胁因素的地位、影响力是不同的。在中距空战下,战机间的角度、高度差异最为重要;在远距空战下,武器的性能会起到很大的影响作用。本文重点研究超视距空战下的动态威胁评估问题,故设敌我无人机间的距离变化范围为10~150km;高度差变化范围为-5~5km;速度比值为大于0的正值;敌机携带导弹攻击距离主要取决于导弹的性能[12],导弹攻击范围为8~80km;我机指向角φ的变化范围为0°~180°。 步骤 2确定输出训练参数种类与数值大小。 BP网络输出训练参数分别为空战能力威胁、角度威胁、距离威胁、速度威胁以及高度威胁的权值共5个参数,即 (24) 式中,ω为威胁评估权向量;ω1为无人机作战能力指数权值;ω2为角度威胁指数权值;ω3为距离威胁指数权值;ω4为速度威胁指数权值;ω5为高度威胁指数权值。 步骤 3采用IGSO算法优化BP神经网络的结构和参数设置,得到最优的权值和阈值。 步骤 4将训练数据带入经IGSO算法优化的BP神经网络进行训练,BP神经网络通过不断调整权值和阈值使得训练误差达到最小时完成训练;将不同的测试数据通过训练好的神经网络即可实时动态地给出对应的权值。 步骤 5通过直接线性加权的威胁度计算式(9)计算目标的威胁度,进行威胁排序。 5实验仿真 5.1基于结构熵权法的IGSO-BP网络训练参数优化验证 5.1.1基于结构熵权法的训练参数优化验证 分别以多无人机协同超视距空战模式下的中距空战、远距空战为例,通过向该领域的10位专家、学者进行请教与咨询,评价各威胁指数的重要程度,得到专家意见,如表2和表3所示。 表2 中距空战模式下的专家意见评估表 表3 远距空战模式下的专家意见评估表 综合考虑多位专家的评估可以减小单一专家评估的主观性、片面性,针对不同的空战模式,分别采用专家赋值的层次分析法和主客观融合的结构熵权法所求得各威胁指数权值进行对比,结果如表4所示。 表4 不同空战模式下层次分析法和结构熵法权值对比 从表4可以得出以下结论。 (1) 中距空战模式下,双方战机距离为15 km时,2种方法权值的排序分别为(从大到小)(3 2 5 4 1)和(2 5 3 4 1);双方战机距离为62 km时,2种方法各权值的排序分别为(从大到小)(3 4 1 5 2)和(3 2 5 4 1)。 (2) 远距空战模式下,双方战机距离为110 km时,2种方法各权值的排序分别为(从大到小)(4 1 3 5 2)和(3 1 4 5 2);双方战机距离为139 km时,2种方法各权值的排序分别为(从大到小)(3 4 1 5 2)和(3 1 4 5 2)。 通过查阅大量文献、咨询相关领域权威专家可知:中距空战中的角度威胁和高度威胁对目标威胁度有很大影响作用;而远距空战中的距离威胁起主要作用,且空战能力比速度威胁对威胁评估的影响略大。对比2种方法排序结果发现:采用结构熵法优化权值后的权值排序结果与该结论吻合。因此,基于结构熵权法的权值优化分析了评估中的专家“盲度”,对可能产生潜在的偏差数据统计处理,故将该方法所得权值作为训练参数更为客观、合理。 5.1.2基于IGSO-BP算法的动态权值计算 在距离10~150 km内选取24组神经网络训练样本,设定不同种类和不同飞行条件下敌机的各态势数据作为输入训练参数,并按上述结构熵权法进行多组评估,将优化后的各威胁指数权值作为BP神经网络的输出训练参数。 得到神经网络训练参数后,设计基于IGSO-BP的动态权值生成器,BP神经网络部分分别有5个输入输出参数,网络结构为5-8-5,故输入层和输出层节点数均为5,隐含层节点数为10,网络需要优化的参数为80个权值,13个阈值,故IGSO算法中萤火虫个体编码长度为80+13=93。IGSO部分设荧光素初值l0=5,β=0.08,nt=5, s=0.05,γ=0.6,ρ=0.4,rs=5,迭代过程按公式进行计算;种群规模为30,迭代次数为140。在MatlaB2009a软件下编程得到超视距空战下的权值变化曲线如图4所示。 图4 超视距下各威胁指数权值分布图 由图4可见,敌无人机作战能力威胁指数权值、距离威胁指数权值和速度威胁指数权值随着敌我空战距离的增大而增大,其对目标威胁度整体产生的作用和影响力越来越大;角度威胁指数权值和高度威胁指数权值随着敌我空战距离的增大逐渐减小。然而,在实际空战中,近距作战模式下角度威胁和高度威胁对威胁估计影响较大,随着敌我空战距离的逐渐增大,远距作战模式下角度威胁和高度威胁产生的作用远没有距离威胁和战机能力威胁的作用大,这与由图4所得结论是一致的。因此,采用IGSO-BP算法生成的动态权值是合理和有效的。 5.1.3IGSO-BP算法的收敛性分析 将25组训练数据预测误差的绝对值和作为萤火虫个体的适应度值,分析对比GSO算法和IGSO算法优化BP神经网络的平均适应度值和进化代数之间的关系,结果如图5所示。 图5 IGSO和GSO算法进化过程 分析图5可知,改进的萤火虫优化算法在进化到70代时就收敛到最佳适应度值0.162,算法基本趋于稳定;而标准萤火虫算法在90代左右趋于稳定,适应度值为0.31。通过对比可以看到:IGSO算法的收敛速度明显高于GSO算法,能够较快找到BP网络的最优权值和阈值,寻优能力较强。 综上所述,本文通过引入BP 神经网络,并采用IGSO算法对BP神经网络进行优化,将动态权值引入空战威胁评估中,弥补了静态权值在空战决策中存在的不足,使得超视距下的多无人机协同空战威胁评估更加合理、准确。 5.2多无人机协同空战中的威胁评估仿真分析 假设我方无人机编队由 4架同类型UCAV组成,空战能力为17.9,机载雷达最大探测距离为140 km,导弹最大射程为100 km,我机速度均为360 m/s。敌方编队由4架不同型UCAV组成,敌方4种类型的UCAV,空战能力分别为9.8、18、16.8、13.5,机载雷达最大探测距离为120 km,导弹最大射程为80 km。双方战机空战态势如表5所示。 表5 敌我三维空战态势 续表5 将敌我无人机的三维空战态势数据及战机参数进行综合处理后作为测试输入样本,其对应的基于结构熵优化的各威胁指数权值作为测试输出样本,通过IGSO-BP算法得到威胁指数权值,如表6所示。 表6 威胁指数权值 根据威胁估计模型计算得到敌无人机各威胁指数并带入式(9)线性加权得到综合威胁度如表7所示。 表7 综合威胁度 将利用结构熵权法得到的训练参数分别通过PSO -RBF[16]和BP网络训练,采用训练好的PSO -RBF和BP网络求出16组测试数据的动态权值,带入威胁估计模型得到目标威胁度,并与IGSO -BP算法所得威胁度进行对比,实验结果如图6所示。 图6 IGSO-BP、BP和PSO-BP计算目标威胁度误差绝对值 分析图6发现,GSO -BP算法所得目标威胁值比BP算法、PSO -RBF算法更接近理想威胁值,误差最大仅为0.004 3,明显低于其他2种算法。因此,IGSO -BP算法能够有效地解决空战目标威胁评估问题。 6结束语 本文以超视距空战为背景,研究多无人机协同攻防威胁评估方法。能够针对现代超视距空战的特点,在构建威胁评估模型的基础上,引入结构熵权法弱化了模型中威胁指数权值求解的主观性,并设计IGSO-BP算法动态求解各威胁权值,实现了复杂空战环境下的目标威胁估计。通过算例仿真验证了该方法能够快速准确地解决威胁排序问题,从而为目标和火力的分配提供有效支持。 参考文献: [1] Brynielsson J, Arnborg S. Bayesian games for threat prediction and situation analysis[C]∥Proc.ofthe7thInternationalConferenceonInformationFusion, 2004:1125-1132. [2] Bourybrisset A C. Ontological engineering for threat evaluation and weapon assignment:a goal-driven approach[C]∥Proc.oftheIEEE10thInternationalConferenceonInformationFusion, 2007:1245-1252. [3] Liu Y F, Chen S D, Zhao Z Y, et al. Threat assessment of manned/unmanned combat aerial vehicle formation air-to-ground attack based on FBNs[J].SystemsEngineeringandElectronics, 2012, 34(8):1635-1639.(刘跃峰, 陈哨东, 赵振宇, 等. 基于FBNs的有人机/UCAV编队对地攻击威胁评估[J].系统工程与电子技术, 2012, 34(8):1635-1639.) [4] Yao Y T, Zhao J, Wang Y, et al. MADM of threat assessment with attempt of target[J].AdvancesinTechnologyandManagement, 2012, 165(7):171-179. [5] Nguyen X T. Threat assessment in tactical airborne environments[C]∥Proc.ofthe5thInternationalConferenceonInformationFusion, 2002:1300-1307. [6] Gao Y, Xiang J W. New threat assessment non-parameter model in beyond-visual-range air combat[J].JournalofSystemSimulation, 2006, 18(9):2570-2573.(高永, 向锦武. 一种新的超视距空战威胁估计非参量法模型[J].系统仿真学报,2006, 18(9):2570-2573.) [7] Xie B R, Yang J Y, Yin J, et al. Analysis of the influencing factors upon kill probability for single missile[J].FireControl&CommandControl,2004,29(4):60-64.(谢邦荣,杨剑影,尹健,等.导弹单发杀伤概率影响因素分析[J].火力与指挥控制,2004,29(4):60-64.) [8] Zhu B L, Zhu R C, Xiong X F.Combataircrafteffectivenessevaluation[M]. Beijing:Aviation Industry Press:1993:287-289.(朱宝鎏, 朱荣昌, 熊笑非. 作战飞机效能评估[M]北京:航空工业出版社, 1993:287-289.) [9] Krishnanand K N, Ghose D. Glowworm swarm optimization:a new method for optimizing multi-modal functions[J].InternationalJournalofComputationalIntelligenceStudies,2009,1(1):93-119. [10] Krishnanand K N, Ghose D. Glowworm swarm optimization for simultaneous capture of multiple local optimal of multimodal functions[J].SwarmIntelligence, 2009, 3(2):87-124. [11] Husken M. Structure optimization of neural networks for evolutionary design optimization[J].SoftComputingAFusionofFoundations,MethodologiesandApplication, 2005, 9(1):21-28. [12] Gu X D, Tong Z X, Chai S J, et al. Target threat assessment based on TOPSIS combined by IAHP and the maximal deviation[J].JournalofAirForceEngineeringUniversity(NationalScienceEdition),2011,12(2):27-31.(谷向东,童中翔,柴世杰,等.基于IAHP和离差最大化TOPSIS法目标威胁评估[J].空军工程大学学报(自然科学版),2011,12(2):27-31.) [13] Kojadinovic I, Marichal J L. Entropy of bi-capacities[J].EuropeanJournalofOperationalResearch, 2007, 178(l):164-184. [14] Cheng Q Y. Structure entropy weight method to confirm the weight of evaluating index[J].SystemsEngineering-Theory&Pratice, 2010, 30(7):1225-1228.(程启月.评测指标权重确定的结构熵权法[J].系统工程理论与实践, 2010, 30(7):1225-1228.) [15] Luo D L, Yang Z, Duan H B, et al. Heuristic particle swarm optimization algorithm for air combat decision-making on CMTA[J].TransactionsonNanjingUniversityofAeronautics&Astronautics,2006,23(1):20-26. [16] Chen J Y, Qin Z, Jia J. A PSO-based subtractive clustering technique for designing RBF neural networks[C]∥Proc.oftheIEEECongressonEvolutionaryComputation, 2008:2047-2052. E-mail:cjy0706@163.com 姚佩阳(1960-),男,教授,博士研究生导师,主要研究方向为指挥自动化理论与技术。 E-mail:ypy_664@163.com 王勃(1990-),男,硕士研究生,主要研究方向为无人机编队协同指挥与控制。 E-mail:wangbo2043@163.com 税冬东(1978-),男,博士研究生,主要研究方向为任务规划。 E-mail:wjsdd@sina.com 网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141105.1633.013.html Dynamic threat assessment based on structure entropy and IGSO-BP algorithm CHEN Jie-yu, YAO Pei-yang, WANG Bo, SHUI Dong-dong (SchoolofInformationandNavigation,AirForceEngineeringUniversity,Xi’an710077,China) Abstract:Since the traditional threat assessment can not adjust the weights dynamically according to the changing of threat factors during beyond-visual-range air combat, the back propagation (BP) neural network is introduced. Considering the subjective factors and objective factors, the structure entropy weight method is used to confirm the weights of each threat index and the weights are supplied to BP neural network training. The dynamic weights calculating method is proposed based on the improved glowworm swarm optimization (IGSO)algorithm and the BP neural network. In IGSO-BP, IGSO is employed to simultaneously optimize the initial weights and thresholds of the BP neural network. The optimized BP network can calculate the weights in different situations better. On the circumstance of assessing the threat degree during multi-unmanned combat air vehicle (UCAV) cooperation combat, simulation results based on the structure entropy weight method and the IGSO-BP algorithm indicate that, the method can assess the weights of threat indexes effectively and can possess better reliability and veracity than conventional methods. Keywords:back propagation (BP) neural network; glowworm swarm optimization algorithm; structure entropy weight method; dynamic weights; threat assessment 通信作者陈洁钰(1989-),,女,硕士研究生,主要研究方向为多无人机协同作战指挥决策与控制、战场态势评估。 作者简介: 中图分类号:TB 391.9 文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.16 基金项目:国家自然科学基金(61273048)资助课题 收稿日期:2014-01-17;修回日期:2014-10-18;网络优先出版日期:2014-11-05。