基于声矢量传感器阵列的空速估计算法
2015-02-18陶建武钱立林梁国伟
虞 飞, 陶建武, 钱立林, 梁国伟
(1.海军航空工程学院控制工程系, 山东 烟台 264001;
2.空军航空大学飞行器控制系, 吉林 长春 130022)
基于声矢量传感器阵列的空速估计算法
虞飞1,2, 陶建武2, 钱立林2, 梁国伟2
(1.海军航空工程学院控制工程系, 山东 烟台 264001;
2.空军航空大学飞行器控制系, 吉林 长春 130022)
摘要:研究了一种新型的空速测量方法。通过引入大气声学中的有效声速概念,建立了稳定气流作用下声矢量传感器阵列的近场输出模型,模型的阵列流形矢量中包含了待估计的空速信息。在此基础上提出了一种基于多重信号分类(multiple signal classification, MUSIC)的空速估计(airspeed estimation,ASE)算法,该算法可用于对空速的高精度估计。为了降低计算复杂度,进一步提出了一种快速的空速估计(fast airspeed estimation, FASE)算法,该算法虽然在ASE的精度上不如MUSIC-ASE算法,但无需谱搜索,具有更强的实时性。最后,对算法的估计性能进行分析,推导了ASE的克拉美-罗界表达式。仿真实验验证了算法的有效性。
关键词:声矢量传感器阵列; 多重信号分类; 克拉美-罗界; 空速估计; 阵列信号处理; 嵌入式大气数据传感
0引言
现代化飞行器具备在大马赫数、大迎角条件下飞行的能力,而传统的基于空速管的大气数据测量系统不能满足这种高速、高机动性飞行器的设计要求。为此,美国宇航局下属的Dryden飞行研究中心研究了一种新型的大气数据测量系统,即嵌入式大气数据传感(flush air data sensing, FADS)系统[1-3],它克服了传统的大气数据测量系统在精度和可靠性上的不足,其压力感受装置一般嵌入式安装在飞行器前端,因而具有一定的隐身性能。但在实际应用中,FADS系统存在一些难题。FADS系统计算飞行器空速是基于经验基础上建立的非线性的动压测量模型,且所需要的动压数据必须采用迭代算法来求解,算法会产生收敛性问题且稳定性得不到保证。此外,计算过程中涉及到的校正参数是根据风洞试验来标定的,这将消耗大量的时间和财力。
声矢量传感器是由3个相互垂直放置的质点振速传感器和一个可选择的压力传感器复合而成的新型传感器,它可以同步测量流场中同一点处的声波质点振速矢量和声压[4-6]。文献[7]采用声矢量传感器构成了一种新型的FADS系统应用于飞行器上,可以利用声矢量传感器的测量值(声压和质点振速矢量)直接计算空速,从而简化了系统空气动力学模型,省去了校正参数的风洞标定,加速了FADS系统的实用化。其缺点在于仅采用单个声矢量传感器来测量空速,使得系统在抗干扰能力和测量精度上难以满足实际要求。文献[8]提出了一种基于声矢量传感器阵列的鲁棒H∞空气速度估计算法,该算法是通过多个传感器测量结果之间的数学迭代来提高空速测量的精度,但运算量较大,而且未利用接收数据的统计特性。文献[9]虽然使用了声矢量传感器阵列的统计特性,但只是简单地将各矢量阵元的接收数据排成一个列矢量,没有考虑各阵元之间的内在联系,使得阵列信号处理中的很多代表性算法难以运用其中。为此,本文改进了文献[9]中的声传感器阵列输出模型,从而能很方便地将阵列信号处理中的参数估计算法[10]推广到空速测量中。首先,考虑声波在连续、均匀稳定气流中的传播原理[11],建立了稳定气流作用下声矢量传感器阵列的近场输出模型,该模型考虑了声矢量传感器各阵元之间的空间相位差信息,其阵列流形矢量中包含了待估计的空速信息。然后根据子空间正交原理,提出了一种基于多重信号分类(multiple signal classification,MUSIC)的空速估计(airspeed estimation, ASE)算法。考虑到MUSIC-ASE算法需要在整个亚音速域进行一维谱搜索,运算量很大,本文进一步提出了一种快速的空速估计算法(fast airspeed estimation, FASE),该算法虽然在空速估计的精度上不如MUSIC-ASE算法,但无需谱搜索,缩短了估计时间,具有更强的实时性。因此,MUSIC-ASE算法适合于对空速精度要求很高的场合,而FASE算法则适合于对实时性要求更高的场合。最后推导了空速估计的克拉美-罗界(Cramér-Rao bound, CRB)表达式,为从理论上评价算法的估计性能提供了依据。
1阵列输出模型
本文考虑的声矢量传感器由3个质点速度传感器组合而成,在空间同一点处正交放置,同时接收空间中3个正交方向的声波质点振速分量。假设测量装置为一圆柱型管路,管路内径为D,声源和声矢量传感器阵列安装于内管壁,管路剖面示意图如图1(a)所示。

图1 测量原理示意图
显然,声源位于声矢量传感器阵列的近场区域,则声源发射到各个阵元的声波波阵面为球面波。由文献[5]可知,单个声矢量传感器的近场阵列流型为

(1)
式中,θ∈(-π/2,π/2](从z轴测量)和φ∈[0,2π)分别表示入射波的俯仰角和方位角。
考虑由L个声矢量传感器构成的均匀线性阵列,阵元间距为d,如图1(b)所示,阵元沿着y轴正方向排列,并对各阵元依次编号为1,2,…,L。为简化模型,设理想气流以恒定速度v顺着管路从-y方向吹来。为了分析气流运动对声波传播的影响,本文引入“有效声速”[11]的概念,通过分析有效声速来考虑气流流动的影响。其具体方法是:以具有有效声速的不运动大气来替换运动大气。当空气向某一方面流动时,相当于在静止声场中叠加了在空气流动方向上的均匀来流。假设气流速度为v,则在来流方向上,声波传播的绝对速度为c+‖v‖,换句话说,来流方向上的有效声速为c+‖v‖,则本文中r方向上的有效声速为cr=c+vr,其中,c表示静止介质中的声速,vr表示气流速度v在r方向上的投影分量。于是,第l个阵元处的声波质点振速为[8]
(2)

(3)
令τl=rl/crl表示声源发射的声波信号到达第l个声矢量传感器的传播时间,其与气流M数有关,将其代入式(2)可得
(4)
以第1个声矢量传感器为参考阵元,则将各个阵元处的声波质点振速表达式写成向量形式为
(5)

考虑声矢量传感器阵列上的噪声影响,则整个声矢量传感器阵列的输出信号可以表示为
(6)

2ASE算法
2.1基于MUSIC的空速估计算法
根据式(6)可得阵列输出数据的协方差矩阵为
(7)

(8)
式中,λs和us∈C3L×1分别为Rx的最大特征值及其对应的特征向量,且us张成的子空间是Rx的信号子空间,对应着单个声源发射的声波信号;Λn是Rx的其余3L-1个特征值构成的对角阵;Un∈C3L×(3L-1)是与Λn对应的特征向量构成的矩阵,其张成的空间是Rx的噪声子空间。由子空间正交原理可得
(9)
实际应用中协方差矩阵Rx一般是通过有限快拍的采样数据估计得到的,即
(10)

(11)

(12)
式中,“abs[·]”表示求复数的模值。MUSIC谱峰对应的M即为空速估计值,表述为
(13)
值得注意的是,本文中要求M<1,即所估计的气流速度应小于声速c(亚音速情形)。
2.2一种快速的空速估计算法
考虑到MUSIC-ASE算法需要在整个亚音速域进行一维谱搜索,运算量较大,本文将提出FASE算法,该算法无需谱搜索,具有更强的实时性,而且最终可以得到空速估计的闭合表达式。
由子空间原理可得,阵列流形矢量aM与信号子空间us所张成的3L×1维空间同为信号子空间,其中,‖hrl‖2=1,l=1,2,…,L,且
(14)
则通过us可以得出阵列流形矢量aM的估计值为
(15)
式中,“∠(·)”表示取复数的相角,“us(i)”表示取向量us的第i个元素,“us(i∶j)”表示取向量的第i到第j个元素所构成的新向量,“‖·‖”表示向量的2-范数。又由式(14)可得,对于l=2,3,…,L,有
(16)
根据向量范数的齐次性有
(17)
式中,“|·|”表示取复数的模值。将式(17)代入式(16)可得
(18)
将τl=rl/crl和式(3)代入式(18)并整理,可得
(19)
式(19)是一个关于M数的一元四次方程,且其各项系数由高次到低次分别为


[(sinθlsinφl)2sinθ1sinφ1+sinθlsinφl(sinθ1sinφ1)2]

(sinθlsinφl)2+4sinθ1sinφ1sinθlsinφl]+





对上述L-1个M数估计值取平均可得M数估计的最终表达式为
(20)
2.3算法性能分析
2.3.1CRB推导
下面推导空速估计的CRB表达式。CRB给出了对空速的无偏估计的最优性能界,因而可用于评估本文所提算法的性能。

(21)
式中,R和μ分别表示3LN×1维观测矢量χ的协方差矩阵和均值矢量;“det{·}”表示求矩阵的行列式。
对于复高斯随机观测信号模型,关于参数矢量η的Fisher信息矩阵的第(i,j)个元素[14]可表示为
(22)

(23)
在实际应用中,一般只关注空速参数M,其他参数为多余参数,假定空速参数M与其他参数不是互耦的,则有
(24)
故相对于空速参数M的CRB为
(25)
2.3.2算法计算复杂度分析


J(9L2-1)
(26)


(27)
在实际应用中,通常有J≫L,则比较式(26)和式(27)可以很容易看出FASE算法的计算复杂度比MUSIC-ASE算法低得多。
无论是摄像还是摄影领域,全画幅传感器带来的浅景深效果都是重要的表现手段,对于拍摄人像、静物以及很多需要使用景深来突出主题的拍摄题材非常重要。不过,反过来说,在另外一些题材,比如微距、风光等拍摄场景中,我们反而需要更大的景深力求还原整个场景,此时专业的摄影师、摄像师反而也会利用小幅面机身能够“增大”景深的特性来进行拍摄。在专业摄影师、摄像师中有个口头禅“弱光能力与景深不可兼得”说的也就是幅面与景深的关系。
3仿真实验

实验 1空速估计的谱峰
设声矢量传感器阵列对稳定气流中的声波信号进行了N=500次采样,图2给出了空速估计的MUSIC谱峰图。从仿真结果可以看出,本文提出的MUSIC-ASE算法在真实的空速处形成了谱峰,而且没有出现“伪峰”,从而可以成功地估计出气流M数。
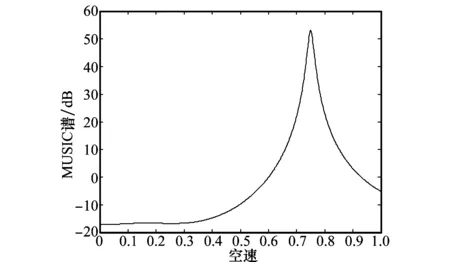
图2 空速估计的谱峰图
实验 2算法的统计性能分析
(1) 信噪比对估计的影响


图3 ASE的RMSE随信噪比的变化曲线
(2) 快拍数对估计的影响

图4 ASE的RMSE随快拍数的变化曲线
(3) 传感器个数对估计的影响

图5 ASE的RMSE随传感器个数的变化曲线
(4) 算法在整个亚音速阶段的估计性能

图6 ASE的RMSE随空速的变化曲线
4结论
本文建立了稳定气流作用下声矢量传感器阵列的近场输出模型,在此基础上提出了MUSIC-ASE算法和FASE算法,实现了对空速的准确快速估计,最后为评价所提算法的估计性能,推导了空速估计的CRB表达式,并分析了所提两种估计算法的计算复杂度。综合理论分析和仿真实验可以看出,相对于FASE算法和DA算法而言,MUSIC-ASE算法具有接近于CRB的最高估计精度。虽然FASE算法在估计精度上不如MUSIC-ASE算法,但无需一维谱搜索,计算量明显低于MUSIC-ASE算法,因而非常适合于对实时性要求更高的测量场合。
另外,考虑到亚音速和超音速时气流流动特性的本质差异,本文所提空速估计算法并不能直接用于超音速情形。因为在超音速时,声源S的声场区域仅局限在以声源S为顶点,气流速度方向为轴线的后向锥体内,并且在该锥体内声波不同波阵面之间会发生重叠的现象,使锥体内的声矢量传感器同时接收到多个信号,而位于锥体外侧的声矢量传感器无法接收到声源S发射的声波信号。因此,在测量超音速空速时,应对亚音速时的质点振速测量模型进行适当改进,再应用此算法来估计超音速下的空速。由于篇幅有限,在此就不具体展开讨论,将在随后的论文中详细论述。
参考文献:
[1] Whitmore S A, Cobleigh B R, Haering E A. Design and calibration of the X-33 flush airdata sensing (FADS) system[R]. Dryden Flight Research Center Edwards, California:NASA/TM-1998-206540, 1998.
[2] Baumann E, Pahle J W, Davis M C. X-43A flush airdata sensing system flight-test results[J].JournalofSpacecraftandRockets, 2010, 47(1): 48-61.
[3] Ellsworth J C. An analytical explanation for the X-43A flush air data sensing system pressure mismatch between flight and theory[R]. Chicago Illinois: AIAA 2010-4964, 2010.
[4] Nehorai A, Paldi E. Acoustic vector-sensor array processing[J].IEEETrans.onSignalProcessing, 1994, 42(9):2481-2491.
[5] Wu Y I, Wong K T, Lau S K. The acoustic vector-sensor’s near-field array-manifold[J].IEEETrans.onSignalProces-sing, 2010, 58(7):3946-3951.
[6] Wu Y I, Wong K T. Acoustic near-field source-localization by two passive anchor-nodes[J].IEEETrans.onAerospaceandElectronicSystems,2012, 48(1):159-169.
[7] Wang L X, Tao J W. A new measuring airdata algorithm[J].ActaMetrologicaSinica,2011,32(1):31-35.(王立新,陶建武.一种新型的大气数据测量方法[J].计量学报,2011,32(1):31-35.)
[8] Chen C, Tao J W. RobustH∞estimation of airspeed based on acoustic vector sensor array[J].ActaAeronauticaetAstronauticaSinica,2013, 34(2): 361-370. (陈诚,陶建武. 基于声矢量传感器阵列的鲁棒H∞空气速度估计算法[J]. 航空学报,2013,34(2):361-370.)
[9] Chen C, Tao J W, Zeng B. Estimation of airspeed based on acoustic vector sensor array[C]∥Proc.ofthe11thInternationalConferenceonSignalProcessing, 2012: 307-310.
[10] Liang J L, Zeng X J, Ji B J, et al. A computational efficient algorithm for joint range-DOA-frequency estimation of near-field sources[J].DigitalSignalProcessing,2009,19(7):596-611.
[11] Yang X R, Chen Y.Atmosphericacoustics[M]. 2nd ed. Beijing: Science Press,2007:182-186.(杨训仁,陈宇.大气声学[M].2版.北京:科学出版社,2007:182-186.)
[12] Stoica P, Nehorai A. Performance study of conditional and unconditional direction of arrival estimation[J].IEEETrans.onAcoustics,Speech,andSignalProcessing,1990,38(10):1783-1795.
[13] Korso M N E, Renaux A, Boyer R, et al. Deterministic performance bounds on the mean square error for near field source localization[J].IEEETrans.onSignalProcessing,2013,61(4):871-877.
[14] Korso M N E, Boyer R, Renaux A, et al. Conditional and unconditional Cramer-Rao bounds for near-field source localization[J].IEEETrans.onSignalProcessing,2010,58(5):2901-2907.
[15] Rangarao K V, Venkatanarasimhan S. Gold-MUSIC: a variation on MUSIC to accurately determine peaks of the spectrum[J].IEEETrans.onAntennasandPropagation,2013,61(4):2263-2268.
虞飞(1987-),男,博士研究生,主要研究方向为传感器与智能测量系统、传感器阵列信号处理。
E-mail:yufei19871128@163.com
陶建武(1959-),男,教授,博士,主要研究方向为矢量传感器阵列信号处理及其应用。
E-mail:jianwu.tao@gmail.com
钱立林(1989-),男,硕士研究生,主要研究方向为大气数据测量。
E-mail:qianlilin1989@163.com
梁国伟(1989-),男,硕士研究生,主要研究方向为多无人作战飞机协同控制技术。
E-mail:liangguowei123@163.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141128.0858.003.html
Airspeed estimation based on acoustic vector sensor array
YU Fei1,2, TAO Jian-wu2, QIAN Li-lin2, LIANG Guo-wei2
(1.DepartmentofControlEngineering,NavalAeronauticalandAstronauticalUniversity,Yantai264001,China;
2.DepartmentofAircraftControlEngineering,AviationUniversityofAirForce,Changchun130022,China)
Abstract:A novel airspeed measuring method is proposed. According to the concept of effective sound velocity in the field of atmospheric acoustics, the near-field output model of acoustic vector sensor array is constructed in a stable air flow. Then a multiple signal classification algorithm for airspeed estimation (MUSIC-ASE) is presented, which can be used to estimate the airspeed with a high degree of accuracy. To reduce the computational complexity, a fast airspeed estimation (FASE) algorithm is addressed. Though the estimation accuracy is not so high as the MUSIC-ASE algorithm, the FASE method enable to avoid spectral peak search, and must be more stronger than the MUSIC-ASE algorithm in real-time. Finally, the performance of the proposed algorithms is analyzed, and a compact expression for the Cramér-Rao bound on the estimation error of the airspeed is derived. Computer simulations are implemented to verify the efficacy of the proposed algorithms.
Keywords:acoustic vector sensor array; multiple signal classification (MUSIC); Cramér-Rao bound (CRB); airspeed estimation (ASE); array signal processing; flush air data sensing
作者简介:
中图分类号:V 211.3
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.13
基金项目:国家自然科学基金(61172126,61203355);吉林省自然科学基金(20140101073JC)资助课题
收稿日期:2014-03-28;修回日期:2014-09-18;网络优先出版日期:2014-11-28。
