基于AGIMM的临近空间机动目标跟踪滤波算法
2015-02-18李君龙
秦 雷, 李君龙, 周 荻
(1. 北京电子工程总体研究所, 北京 100854;
2.哈尔滨工业大学控制科学与工程系, 黑龙江 哈尔滨 150001)
基于AGIMM的临近空间机动目标跟踪滤波算法
秦雷1, 李君龙1, 周荻2
(1. 北京电子工程总体研究所, 北京 100854;
2.哈尔滨工业大学控制科学与工程系, 黑龙江 哈尔滨 150001)
摘要:由于临近空间高超声速目标的机动形式复杂,单一模型很难满足高精度跟踪的需要。因此需要使用基于多种模型进行交叉耦合的交互式多模型算法,这种算法特点与临近空间目标高速、高机动特性相适应。提出了一种自适应网格交互多模型跟踪算法用于临近空间高超声速机动目标的跟踪问题。所提方法能够处理自适应时变模型集合,随时调整当前时刻使用的模型数量,相比于固定结构交互式多模型算法极大减少了计算量,计算效率和跟踪精度更高,数值仿真结果验证了所提算法的有效性。
关键词:目标跟踪; 交互式多模型; 自适应网格; 临近空间
0引言
目前,α-β-γ滤波算法、卡尔曼滤波算法、扩展卡尔曼滤波算法是目标跟踪领域应用较多的算法。这些基本滤波算法的受限之处在于目标的运动弹道必须通过单一的数学模型来描述。当只用一种数学模型无法准确描述机动目标运动时,这些基本的滤波算法无法准确估计目标运动状态。为了解决该问题,国内外学者提出了基于卡尔曼跟踪滤波的改进算法,例如输入估计算法(input estimation, IE)[1-3]、变维估计算法(variable dimension input estimation, VDIE)[4-5]、交互式多模型估计算法(interacting multiple model, IMM)[6-10]以及自适应网格交互式多模型估计算法(adaptive grid interacting multiple model, AGIMM)[11-13]。
文献[14]提出的输入估计算法是一种重要的机动目标跟踪检测方法,该方法不依赖于机动特性的先验知识,而是把机动加速度看做未知的确定性输入,利用最小二乘法从新息中估计出机动加速度大小,并用来更新目标的状态。
变维估计算法是由文献[15]提出,该方法不依赖于目标机动的先验假设,把机动看做目标动态特性的内部变化,而不是作为噪声建模。检测手段采用平均新息法,调整方式采用“开关”型转换,在没有机动的情况下,跟踪滤波器采用原来的模型,一旦检测到机动,滤波器就要使用不同的、具有较高维数的状态量测,新的状态分量被附加上,再由非机动检测器检测机动消除并转换到原来的模型[16]。
由于以上2种算法的计算量非常大,而且加速度估计的维数转换和时间延迟引起的跟踪弹道的不连续性,导致实时跟踪高速机动目标时,算法的跟踪效果较差。
IMM算法是多模型算法中最有效的方法之一,它被用来处理模型存在的状态估计问题。由于目前机动目标模型越来越向模块化、并行计算的方向发展,越来越强调计算效率,估值时间较小或者不存在估值时间滞后,因此交互式多模型以其计算效率较高、跟踪误差较小受到广泛关注。目前在使用单一模型跟踪临近空间飞行器时会出现跟踪滤波精度降低问题,尤其当使用协调转弯模型跟踪目标时体现的更为明显,因此使用IMM算法显得尤其重要。
IMM算法精度高,因此越来越多地受到重视。然而,IMM算法中的固定模型集需要大量模型才能涵盖较强机动性的运动,而使用过多的模型将会增加计算量,并且在模型之间转换过程中计算效率会有所降低。
目前,基于IMM算法的改进算法,即AGIMM已经发展成为最有效的跟踪算法之一。
AGIMM算法没有预先定义图集,认为子图集是一组根据当前状态实时生成的3个不确定角速度的模型集,有能力处理自适应时变模型集合,包括每一种条件下用于跟踪目标的各种目标模型,由于该算法与固定结构的IMM滤波算法相比不仅减少了计算量,而且有更高的精度和更好的性能,因此在工程实践中获得了更加广泛的应用。考虑临近空间高超声速飞行器所有转弯运动的角速度在变化范围内的分布未知,角速度w值变化范围为[-wmax,wmax][17]。
本文应用AGIMM算法设计了一种临近空间机动目标跟踪滤波器,其利用较少的目标运动模型即可以实现机动形式复杂的临近空间高超声速飞行器的有效跟踪,该算法与固定结构的IMM滤波算法,例如交互式多模型粒子滤波(interacting multiple model-particle filter, IMM-PF)算法相比,不仅减少了计算量,而且有更高的精度和更好的性能。
1临近空间机动目标跟踪AGIMM滤波器设计
1.1临近空间目标跟踪系统模型
假定目标在三维平面内运动,设定基站和目标的相对位置关系示意图如图1所示。
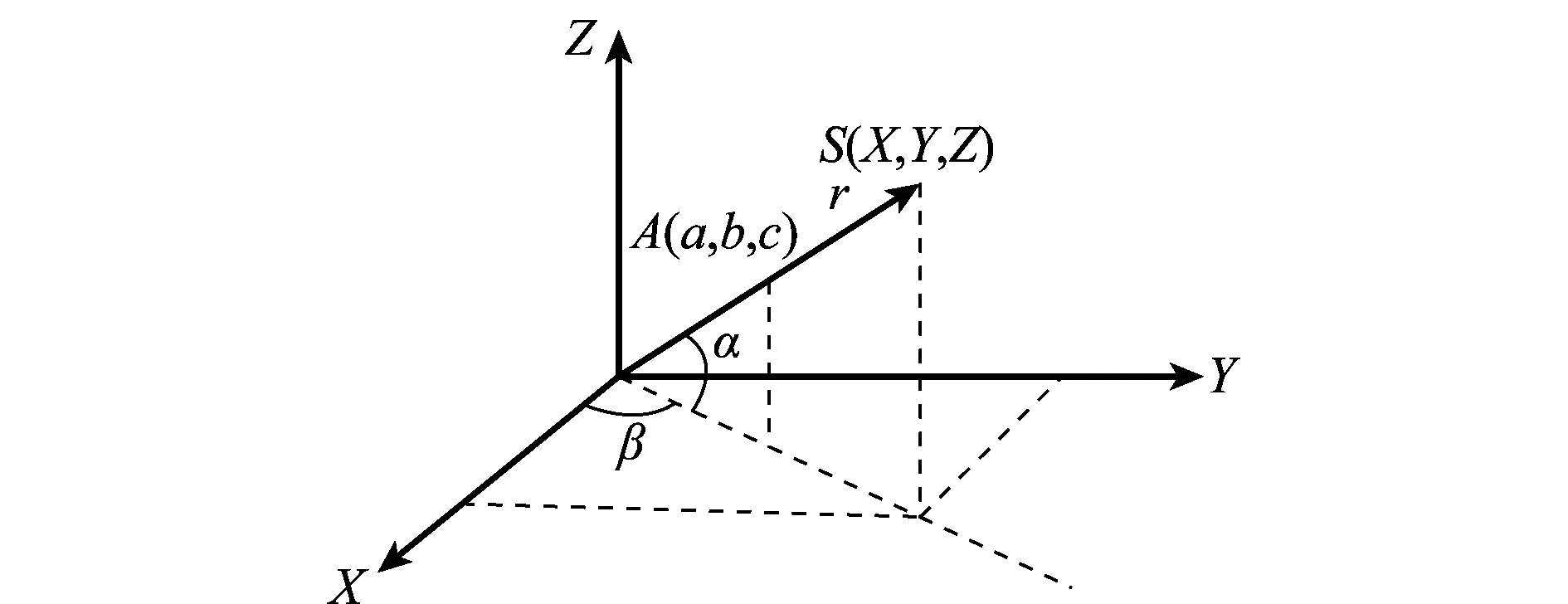
图1 三维目标与基站相对位置示意图
在直角坐标系下,目标位置与方位角、俯仰角、目标与基站距离的关系为

(1)
式中,r为目标与基站的距离;A(a,b,c)为基站的坐标位置;S(X,Y,Z)为目标坐标位置;α为目标俯仰角;β为目标方位角,规定逆时针为正。
目标在侧向平面(x,y)平面内机动飞行而纵向平面内维持等高度飞行。描述临近空间飞行器在侧向平面内的运动采用常值转弯模型[18]。离散化动态方程为
(2)
式中
式中,ω代表转弯速率,描述向左转弯时取ω>0,向右转弯时取ω<0,模型近似常值速度运动时取ω=0。
量测方程为
(3)
式中

(4)
式中,V(k+1)设定为零均值高斯白噪声。量测噪声的协方差矩阵为
(5)
1.2AGIMM滤波算法
AGIMM算法是由3种协调转弯模型组成,协调转弯模型是带有转弯速率的以3种模型概率权和为中心的左向转弯,中心转弯和右向转弯模型为
(6)
式中,μL(k),μC(k)和μR(k)分别代表k时刻左边模型、中心模型、右边模型的模型概率。
假定目标机动转弯速率ω在连续范围内[-ωmax,ωmax]变化,针对时变支撑的有向图Dk的交互式多模型算法,网格值ωL(k),ωC(k),ωR(k)∈[-ωmax,ωmax](k=0,1,…,)模型集合Mk={ωL(k),ωC(k),ωR(k)},状态集合Xk={xLk,xCk,xRk}。设定误差协方差矩阵集合为Pk={pLk,pCk,pRk},模式转换概率矩阵为
(7)
AGIMM算法以粗网格D0={ωL(0)=-ωmax,ωC(0)=0,ωR(0)=ωmax}作为初始化,在每一个循环时间步(k→k+1)网格根据4步适应逻辑进行调整。
步骤 1扩展卡尔曼滤波算法。
离散型非线性扩展卡尔曼滤波方程为
(8)
(9)
(10)
(11)
可以确定出扩展卡尔曼滤波增益Kk为
(12)
步骤 2网格中心和网格距离重新调整
(13)
式中,{μL(k),μC(k),μR(k)}是交互式多模型后验概率。
步骤 3这里主要分为以下3种情况。
(1) 没有跳跃
后验概率为
(14)
(15)
式中,λL(k)=max{ωc(k)-ωL(k),δω},λR(k)=max{ωR(k)-ωC(k),δω},t1=0.1作为探测模式的阈值,δω作为模型分离距离。
(2) 向左跳变
后验概率为μL(k)=max{μL(k),μC(k),μR(k)}。
(16)
(17)
式中,t2=0.9作为探测重要模式的阈值。
(3) 向右跳变
后验概率为μR(k)=max{μL(k),μC(k),μR(k)}。
(18)
(19)
步骤 4状态估计和误差协方差矩阵融合
(20)
(21)
以上即为AGIMM算法的计算步骤,需要说明算法的每一次循环对于ω=ωL,ωC,ωR来说子模型转移矩阵F(ω)必须被重新计算。
2仿真分析
本文以临近空间高超声速巡航导弹X-51A为对象研究其机动飞行轨迹的跟踪问题。X-51A的主要机动运动方式是采取侧向平面内低频大范围规避式机动,本文针对常值攻角和倾斜角的机动模式研究平面内目标跟踪问题。X-51A在纵向平面采取等高飞行方式,无明显机动。
2.1目标运动
设定目标初始位置为x0=600 km,y0=30 km,z0=0 km,初始速度为vx0=1 800 m/s,vy0=0 m/s,vz0=0 m/s。
目标运动主要分为以下3个阶段。
第1阶段t=0~20 s,目标沿着初始速度方向做匀速直线运动,动态方程为xk=FCVxk-1+GwCV,式中
(22)

第2阶段t=21~380 s,目标做匀速转弯运动,动态方程为式(2)。目标匀速转弯时候的角速度为0.098 rad/s。
第3阶段t=381~400 s,目标做匀加速直线运动,目标真实机动加速度设置如下:x方向机动加速度为零,y方向机动加速度为平面内方波信号;0~20 s,y方向加速度为1g, 21~380 s,y方向加速度为0;381~400 sy方向加速度为-1g,z方向机动加速度为零。
假设目标跟踪系统中基站位置为(0,0,0),跟踪时间为400 s。设定采样周期为1 s,量测方位角的标准差为0.008 7 rad,量测俯仰角的标准差为0.008 7 rad,量测距离的标准差为9 m。
2.2算法对比分析
2.2.1AGIMM算法仿真

(23)
根据以上设定的仿真条件,设定z方向目标以H=30 km等高飞行,通过使用扩展卡尔曼滤波算法,得到基于AGIMM算法和IMM-PF算法跟踪的纵向和侧向目标运动轨迹与实际目标运动轨迹对比如图2所示。

图2 目标真实轨迹与2种算法估计后的目标运动轨迹示意图
运用该算法进行仿真验证过程中使用了3种CT运动模型,分别为向左跳变模型,没有跳跃模型,向右跳变模型。采样周期为1 s,根据D0={ωL(0)=-ωmax,ωC(0)=0,ωR(0)=ωmax}初始化条件,设定初始角速度为{ωL(0)=-0.098,ωC(0)=0,ωR(0)=0.098}。根据式(14)和式(15),设定λL(k)=1.87×π/180,λR(k)=1.87×π/180。根据式(14)和式(15),设定t1=0.05 s,t2=0.92 s,过程噪声方差设为
计算目标跟踪位置均方根误差(root mean square error, RMES)值和目标跟踪速度RMSE值,公式分别为
(24)
(25)
为了进行对比,又基于匀速直线运动(constant velocity, CV)模型、CT模型和匀加速运动(constant acceleration, CA)模型设计了IMM-PF跟踪算法。然后,将这2种算法进行比较分析。匀速运动模型模式概率初始值为1,匀速转弯模型模式概率初始值为0,匀加速运动模型模式概率初始值为0。粒子数量是500个,滤波估计的初始状态为X0=[600 000+300;1 800+0.5;30 000+300;0+0.5;0+300;0+0.5]。
2.2.2IMM-PF算法
为了进行对比,这里简单介绍一下IMM-PF算法。其主要步骤包括随机抽取粒子、输入交互、模型匹配粒子滤波、模型概率更新、残差二次采样、输出交互等。
2.2.3仿真结果
根据式(24),得到基于AGIMM算法和IMM-PF算法的目标位置RMSE如图3所示。
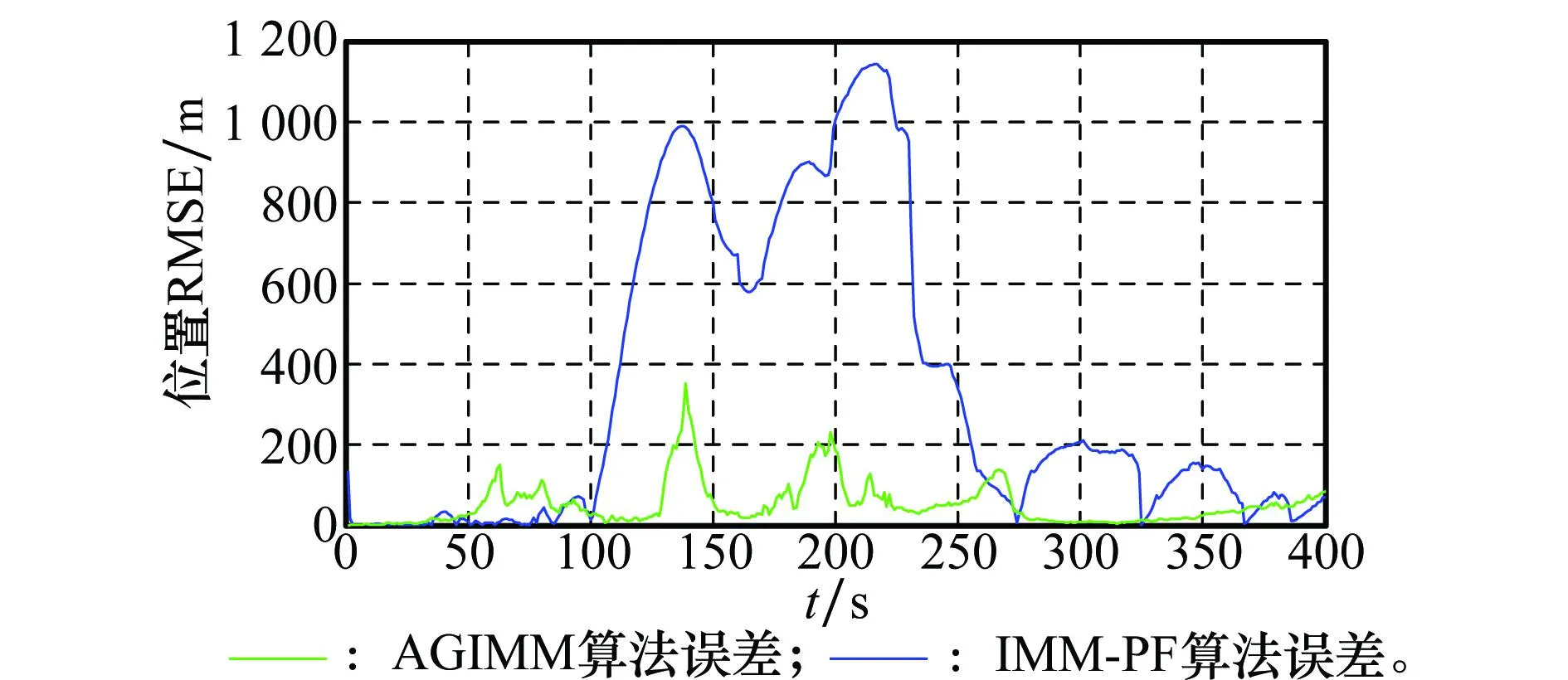
图3 目标位置均方根误差
同样,根据式(25),得到基于AGIMM算法和IMM-PF算法的目标速度RMES如图4所示。

图4 目标速度均方根误差
从上述仿真得来的图3和图4可以看出,AGIMM算法的位置误差、速度误差比IMM-PF算法要小,跟踪机动目标精度更高。因此可以得出AGIMM算法相比IMM-PF算法在跟踪临近空间目标方面更具优势,具有一定的实际意义。
2.2.42种算法实时性与抗干扰性对比分析
在仿真计算过程中,通过100次蒙特卡罗仿真得到AGIMM算法与IMM-PF算法总用时分别为7.234s和10.545s,因此一次蒙特卡罗仿真试验所用时间如表1所示。

表1 2种算法一次用时对比 s
从表1中可以看出,AGIMM算法的一次用时比IMM-PF算法的一次用时要小,说明该算法实时性更强,计算速率更快,具有更高的工程实用价值。
下面针对2种算法的抗干扰性进行分析,分别选取量测方位角、量测俯仰角、量测距离3组量测误差如表2所示。

表2 3组量测误差
经过仿真对比分析,得到AGIMM算法的位置RMSE和速度RMSE差如表3所示。

表3 AGIMM算法的位置RMSE和速度RMSE
得到IMM-PF算法的位置RMSE和速度RMSE如表4所示。

表4 IMM-PF算法的位置RMSE和速度RMSE
从表2~表4可以看出,当使用相同的3组量测误差时候,AGIMM算法的位置RMSE和速度RMSE比IMM-PF算法误差要小,说明AGIMM算法的抗干扰性比IMM-PF算法更强,在恶劣的环境中仍然可以得到较好的滤波估计效果。
3结论
本文针对临近空间机动目标跟踪问题,提出了一种以匀速转弯模型为基础的自适应网格交互式多模型滤波算法,该算法针对临近空间目标较复杂的机动形式有良好的跟踪性能。仿真结果表明其位置、速度估计精度均明显优于基于匀速运动模型,匀加速运动模型和匀速转弯模型3种组合的交互式多模型粒子滤波算法。
参考文献:
[1] Sheng H, Li X M, Qi J W, et al. Input estimation algorithm based on modification of innovation sequence for maneuvering target tracking[J].SystemsEngineeringandElectronics,2009,31(9):2121-2124.(盛琥,李晓明,齐建文,等.基于新息序列修正的输入估计算法[J].系统工程与电子技术,2009,31(9):2121-2124.)
[2] Ali S K,Hamed M S. A modified online input estimation algorithm for inverse modeling of steel quenching[J].NumericalHeatTransfer,2010,57(1):1523-1535.
[3] Zhou X N, Zhang F Y, Liu Y A. Method for maneuvering target tracking based on input estimation[J].JournalofJiangnanUniversity(NaturalScienceEdition),2012,11(6):674-677.(周星南, 张凤宇, 刘以安. 基于输入估计的机动目标跟踪方法[J].江南大学学报,2012,11(6):674-677.)
[4] Yong H P, Seo J H, Lee J G. Tracking using the variable-dimension filter with input estimation[J].IEEETrans.onAerospaceandElectronicSystems, 1995,31(1):399-408.
[5] Chen X R, Chen S F. Variable dimension of Kalman filter for target tracking[J].ChineseJournalofScientificInstrument, 2006,27(9):1163-1166.(陈晓荣,陈淑芬. 变维卡尔曼滤波实现运动目标的跟踪[J].仪器仪表学报,2006,27(9):1163-1166.)
[6] Keche M, Ouamri A, Woolfson M S. Fast adaptive update rate for phased array radar using IMM target tracking algorithm[C]∥Proc.oftheIEEEInternationalSymposiumonSignalProcessingandInformationTechnology, 2006:277-282.
[7] Seah C E, Inseok H. Stability analysis of the interacting multiple model algorithm[C]∥Proc.oftheAmericanControlConference, 2008:2415-2420.
[8] Chen Y, Cheng Z, Wen S L. Modified IMM algorithm for unmatched dynamic models[J].SystemsEngineeringandElectronics,2011,33(12):2593-2597.(陈映,程臻,文树梁. 适用于模型失配时的改进IMM算法[J]. 系统工程与电子技术,2011,33(12):2593-2597.)
[9] Chen H H, Tao J F, Zhou F, et al. Tracking of high-maneuvering target based on EPF-IMM algorithm[J].ElectronicsOptics&Control,2010,17(10):17-19.(陈欢欢,陶建锋,周峰,等. 基于EPF-IMM算法的高机动目标跟踪研究[J].电光与控制,2010,17(10):17-19.)
[10] Lu J, Xu Z Y, Xiong J X, et al. Research on IMM algorithm with maneuvering target’s variable sampling period[J].ModernElectronicsTechnique,2010(15):21-23.(卢菁,徐朝阳,熊建鑫, 等. 机动目标变采样周期滤波的IMM算法研究[J].现代电子技术, 2010(15):21-23.)
[11] Xu J H, Liu Z, Dang L. Distributed adaptive grid interacting multiple model joint probabilistic data association algorithm[J].JournalofWuhanUniversityofTechnology(TransportationScience&Engineering),2013,37(2):292-296.(许江湖,刘忠, 党玲. 分布式自适应网格交互多模型JPDA算法[J].武汉理工大学学报(交通科学与工程版), 2013,37(2):292-296.)
[12] Xu J H, Liu Z, Dang L. A centralized multisensor multitarget tracking algorithm based on variable structure multiple-model[J].ShipScienceandTechnology,2012,34(1):67-72.
[13] Qiao X D, Wang B S. A new approach to grid adaption of AGIMM algorithm[C]∥Proc.ofthe6thInternationalConferenceonInformationFusion, 2003:400-405.
[14] Chan Y T, Hu A G C, Plant J B. A Kalman filter based tracking scheme with input estimation[J].IEEETrans.onAES, 1979, 15(2):237-244.
[15] Birmiwal K, Bar-Shalom Y. Maneuver target tracking a cluttered environment with a variable dimension filter[J].IEEETrans.onAES, 1984, 20(9):635-645.
[16] He Y, Xiu J J, Zhang J W, et al.Radardataprocessingwithapplications[M]. Beijing:Publishing House of Electronics Industry,2013.(何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2013.)
[17] Gao Y J, Xu X H, Yang G Q. Two variable structures of IMM algorithms for flight trajectory prediction[J].JournalofCivilAviationUniversityofChina,2003,21(6):1-5.(高彦杰,徐肖豪,杨国庆. 飞行轨迹预测的两种变结构IMM算法[J].中国民航学院学报,2003,21(6):1-5.)
[18] Bar-Shalom Y, Li X R.Estimationandtracking:principles,techniquesandsoftware[M]. Dedham:Artech House, 1993.
秦雷(1987-),男,博士研究生,主要研究方向为飞行器导航、制导与控制。
E-mail:351879610@qq.com
李君龙(1964-),男,研究员,博士研究生导师,博士,主要研究方向为飞行器导航、制导与控制。
E-mail:xdfyjs@sohu.com
周荻(1969-),男,教授,博士,主要研究方向为飞行器导航、制导与控制。
E-mail:zhoud@hit.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141201.1956.005.html
Tracking filter algorithm for near space target based on AGIMM
QIN Lei1, LI Jun-long1, ZHOU Di2
(1.BeijingInstituteofElectronicSystemEngineering,Beijing100854,China;
2.DepartmentofControlScienceandEngineering,HarbinInstituteofTechnology,Harbin150001,China)
Abstract:Due to the current maneuvering target model is developing towards more and more modular and parallel computing, which puts forward higher requirements for calculation efficiency of the algorithm. For high supersonic maneuvering targets in near space, their maneuvering forms are very complex, since the precision of a single target maneuvering model cannot satisfy the requirements of tracking. So it is necessary to use the interactive multiple model algorithm for cross coupling based on a variety of models. The characteristic of this algorithm is adapted to that of high speed and high maneuver for near space targets. This paper puts forward an algorithm called adaptive grid interacting multiple model algorithm which is used to track high supersonic maneuvering targets in near space, this algorithm guarantees large target tracking accuracy and calculation efficiency, the validity of the algorithm is verified with numerical simulation results.
Keywords:target tracking; interacting multiple model; adaptive grid; near space
作者简介:
中图分类号:TJ 765.1
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.05
收稿日期:2014-07-07;修回日期:2014-10-20;网络优先出版日期:2014-12-01。
