一种海洋环境监测无人船系统及其海洋应用
2015-02-16金久才崔廷伟
金久才,张 杰,邵 峰,2,崔廷伟
(1. 国家海洋局 第一海洋研究所,山东 青岛 266061; 2.中国石油大学(华东) 信息与控制工程学院,山东 青岛 266580)
一种海洋环境监测无人船系统及其海洋应用
金久才1,张 杰1,邵 峰1,2,崔廷伟1
(1. 国家海洋局 第一海洋研究所,山东 青岛 266061; 2.中国石油大学(华东) 信息与控制工程学院,山东 青岛 266580)
无人船是一种新型的无人多功能海洋监测平台,能够以遥控或自动方式完成连续性海洋参数测量。针对湖泊和近海的海洋环境监测,自主研发了一种双体双推进式无人船系统“USBV”。利用该无人船系统,搭载信标差分GPS、单波束测深仪和CTD(温盐深仪),于2014-10—11在连云港当路水库和连岛海域,开展了水深、温度和盐度的自动航行监测。通过分析无人船的自动航行性能和深度、温度与盐度的测量结果,验证了无人船“USBV”用于海洋环境监测的自动性和可行性。
无人船;环境监测;水深测量;温盐测量
随着无人平台的推广以及相关定位、导航与控制技术的快速发展,越来越多的无人海洋自动平台应用于海洋监测领域,如无人机(Unmanned Aerial Vehicle,UAV)、无人水下自主航行器(Autonomous Unmanned Vehicle,AUV)等。而工作于海气界面的无人船也逐渐成为海洋监测平台研究和应用的一个热点[1]。无人船(Unmanned Surface Vehicle,USV)是一种新型的搭载平台,依托小型船舶,装载定位、导航与控制设备,可搭载多种海洋监测传感器,以遥控或自主的工作方式,在走航过程中进行连续性海洋监测。无人船工作于水面,大部分表面原位和剖面测量传感器均可搭载,例如CTD、叶绿素、溶解氧、流速仪、单/多波束测深仪、ADCP等,可应用于浅水湖泊、近岸、岛礁周边等复杂区域甚至大洋的多要素同步测量。
近十年来,已有超过10个国家的40多个海洋研究单位开发了几十款不同用途的无人船,并开展了多种海洋应用,例如海洋测绘、声学通信中继、海洋环境监测等[2]。美国密歇根大学Brown等[3]开发了无人船“BathyBoat”,应用于湖泊水深、环境测量。英国普利茅斯大学开发了无人船“Springer”,搭载了水质监测传感器,应用于海洋环境监测[4]。麻省理工大学开发的水声通讯中继无人船“SCOUT”,完成了多个USV和AUV间通信试验[5]。另外,最近还出现了一些新颖的无人船应用,例如用于防波堤检测的无人船“DELFIM”[6]、环境建模测量与救助无人船“ROAZ”[7]和长航时波浪驱动无人船“WaveGlider”[8]等。由于国内无人船应用刚刚起步,目前相关海洋环境监测应用还比较少。
本文利用自主研发的无人船系统“USBV”(Unmanned Surface Bathymetry Vehicle)[9],搭载单波束测深仪、CTD、信标差分GPS、三维电子罗盘、陀螺式姿态仪等传感器,以水深、温度、盐度测量为例,开展了无人船系统的海洋环境监测应用实验。
1 无人船系统“USBV”
自主研发的无人船系统“USBV”是由岸基控制单元和无人船单元两部分组成,二者之间采用数传电台建立测量数据回传和控制命令下达链接,参见无人船网站(http:∥www.usbv-fio.com)。岸基控制单元以笔记本电脑为控制核心,基于LabView开发了岸基控制软件,构建了回传数据显示、存储和自动控制命令下达的终端,并外接有用于实时遥控的遥控杆(图1)。在岸基控制软件中,实时显示的数据有船体参数(位置、速度、航向、横滚和俯仰)、水深和水上与水下视频,自动控制设置包括期望的速度、航向、位点、路径等。
无人船单元采用双体双推进船体结构,以嵌入式单板机为主控核心,集成有GPS、电子罗盘、姿态仪、测深仪、水上与水下摄像机、数传电台等(图2)。主控系统和电源分别密封于两个不锈钢舱内,外接传感器的数据线、电源线和天线是通过舱体上的水密插头连接。使用Matlab编写的船载程序,功能包括读取传感器数据(GPS、电子罗盘、测深仪等)、接收岸基控制单元发送的控制命令、导航以及向推进器控制器发送底层控制指令。其中,中海达公司的HD360单波束测深仪采用在线方式集成于无人船底部,而加拿大RBR公司concerto CTD采用自容方式装载于无人船尾部。
无人船“USBV”重约130 kg,长2.8 m,宽1.5 m,续航能力可达20 km(经济航速下8 h),船速在0~1.5 m/s范围内可调,通信距离超过40 km。驱动电源使用24 V和12 V锂电池组,分别为推进系统和主控及传感器系统供电。推进系统包括两个水下推进器及控制器,采用双推进器组合及转速差控制方式,实现前进、后退和转向操控。目前具备了无人船航向、位置、路径等的自动控制能力,能够按照岸基控制单元发送的期望航向、位置和航线完成相关海洋参数的自动测量。

图1 岸基控制单元

图2 无人船“USBV”
2 无人船水深、温度、盐度测量实验及分析
2.1 测线自动跟踪
2014-10-11期间,在连云港海州区当路水库和连岛海域开展了6 d无人船自动控制环境监测实验。当路水库呈直角三角形,直角边长约为300 m×400 m。实验期间,USBV搭载测深仪和CTD,进行了多次期望航向、位点和路径自动航行测量任务。图3给出了典型四边形测线的自动跟踪实时岸基控制软件截图,其中左下角显示无人船的自动航行轨迹,右上角显示无人船水深测量结果,中部显示无线视频。另外,还成功完成了弓字形、五角星等轨迹的自动追踪航行。在所有的自动跟踪航行中,通过岸基控制单元发送期望位点或测线,无人船均自动完成测量任务。

图3 四边形测线自动跟踪测量(岸基软件截图)
2.2 水深测量及误差分析
在无人船的自动走航过程中,测深仪每秒钟测量记录一次水深值。在水深数据处理中,首先使用测深尺现场比测,纠正了测深仪的吃水偏差。对于船体姿态带来的误差,使用三维电子罗盘同步测量的横滚和俯仰数据,进行了三角函数几何纠正。无人船采用双体双推进方式,水库实验时船体姿态较稳定,三维电子罗盘的横滚和俯仰角标准差均小于0.5°。
在5 d的水库实验中,无人船总有效测量时间约为17 h,无人船运动速度平均为1 m/s,频率1 Hz的测点数约有64 000个,完成了对水库主体部分的交叉覆盖,交叉处水深值的自检验结果较好。在剔除明显错误水深数据的基础上,采用反距离权重插值方法,获得了当路水库水深插值结果(图4)。从插值水深图中可以看出该水库中部偏左存在两处水深极大值处,约11.09 m,总体分布趋势是随离岸的距离增大水深增加,平均水深为7.29 m。
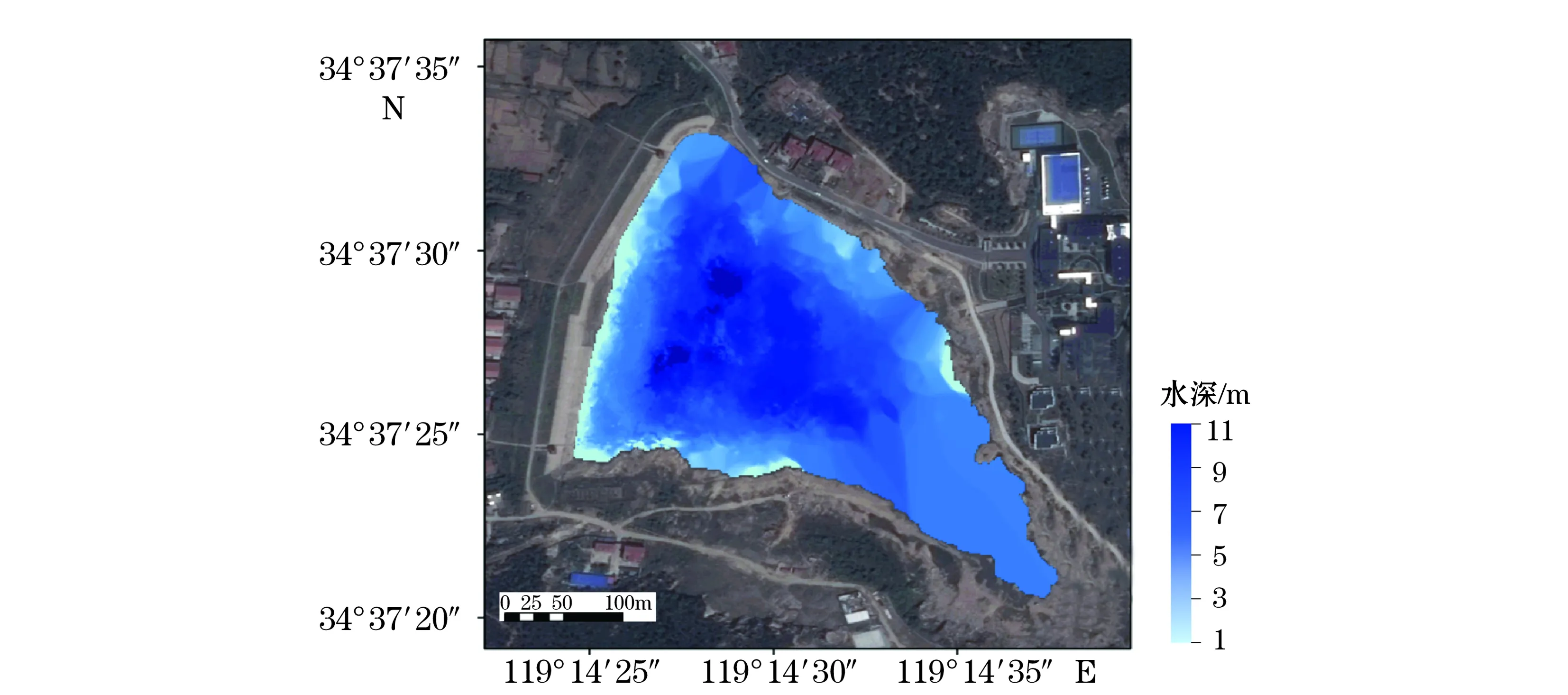
图4 当路水库水深插值图

图5 无人船航迹深度测量(连岛,2014)
在2014-11-03连岛海域的海试中,搭载测深仪和CTD,开展了水深、温度、盐度无人船观测,航迹水深测量结果见图5,整体水深小于10 m。对于无人船的海上水深测量,其横滚和俯仰姿态测量误差将会严重影响水深测量精度。在实验期间,无人船搭载了honeywell 3000三维电子罗盘,其测量精度为0.5°,俯仰和横滚变化均保持在±10°范围内。无人船横滚和俯仰测量误差带来的单波束测深误差可以表示为
δD=D(1-cos(θ+δθ)/cosθ
(1)
式中,D表示水深;θ和δθ分别表示姿态角(横滚角和俯仰角)及其误差。如果要求测深精度为0.2%D,那么在无人船达到最大姿态角10°时,其要求的姿态测量误差为0.6°,所以该型电子罗盘可满足海上水深测量要求。但若要求更高的水深测量精度或在海上风浪较大的情况下测量,则需要进一步提高无人船的姿态测量精度。
2.3 温度、盐度测量
在无人船海试中,CTD探头放置在无人船水线下约0.25 m处,测量频率设置为每3 s采样1次,温度和盐度连续测量结果如图6所示。在1.5 h的航行过程中,温度和盐度测量值变化不大,平均值分别为17.282 ℃和27.620,标准差分别为0.042 ℃和0.028。由于试验在离岸约250 m,所以温度和盐度空间变化不大,盐度值相对较低。
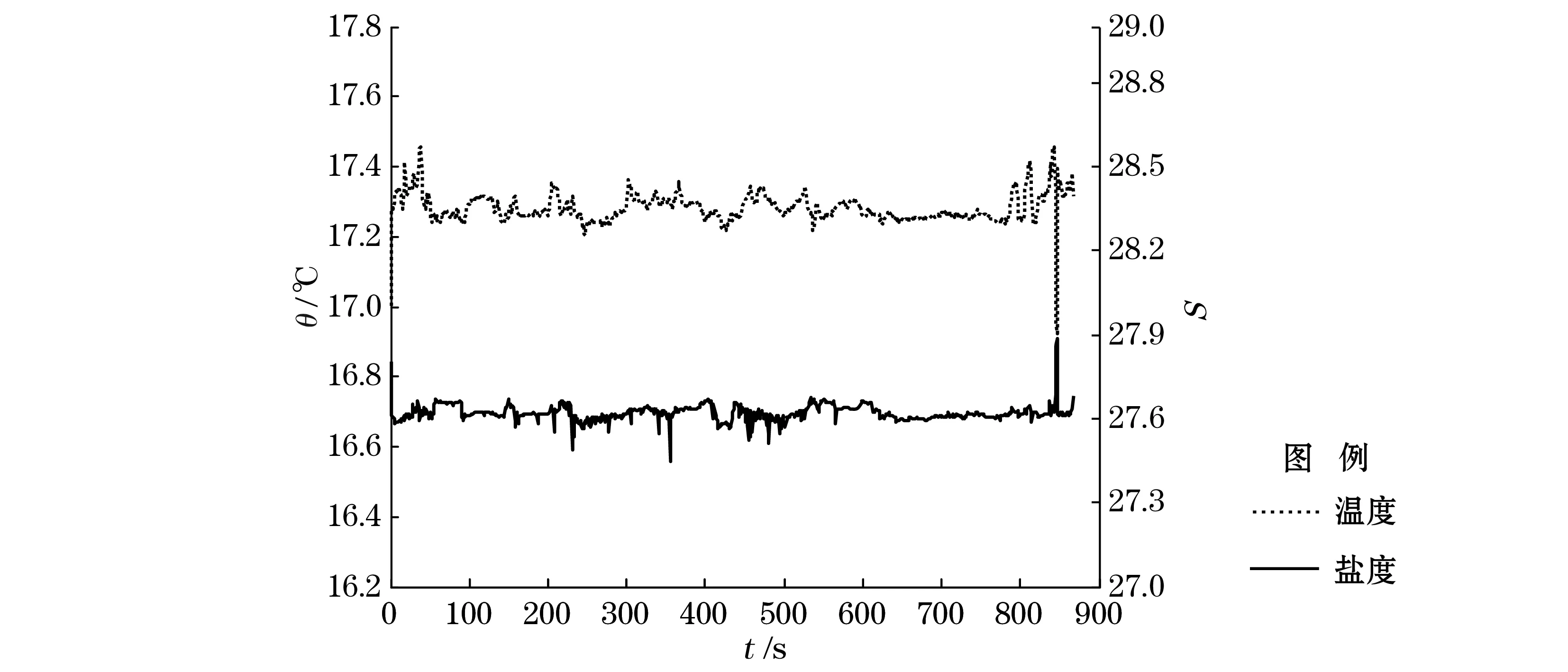
图6 无人船温度、盐度连续测量
3 结 论
在连云港当路水库和连岛海域,进行了约18.5 h的无人船航行实验,总航程约为67 km,验证了该无人船系统的可靠性。实验也验证了无人船的路径跟踪功能,有效地保证了无人船按预定测线自动航行,从而提高了测量效率。通过分析无人船姿态和深度数据,表明搭载有三维电子罗盘和单波束测深仪的无人船系统可以满足近海水深测量精度的要求。水深、温度、盐度的同步测量也表明了该无人船测量系统的可行性和实用性。
致谢:连云港市海域使用保护动态管理中心赵新生、许海蓬、陈松茂在实验中给予了支持和帮助。
[1] VEERS J, BERTRAM V. Development of the USV multi-mission surface vehicle III[C]∥5th Int. Conf. Computer and IT Application in the Maritime Industries. Leiden, Holland: COMPIT, 2006: 345-355.
[2] MANLEY J E. Unmanned surface vehicles, 15 years of development[C]∥Proceedings of MTS/IEEE Quebec Conference and Exhibition,2008: 1-4.
[3] BROWN H, JENKINS L, MEADOWS G, et al. BathyBoat: An autonomous surface vessel for stand-alone survey and underwater vehicle network surpervision[J].Marine Techaology Society Journal, 2010,44(4):20-29.
[4] NAEEM W, XU T, SUTTON R, et al. The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring[J].Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2008, 222(2): 67-79.
[5] CURCIO J, LEONARD J, PATRIKALAKIS A. SCOUT-a low cost autonomous surface platform for research in cooperative autonomy[C]∥Proceedings of MTS/IEEE, OCEANS. Washington: IEEE, 2005, (1): 725-729.
[6] VASCONCELOS F, SILVESTRE C, OLIVEIRA P. INS/GPS aided by frequency contents of vector observations with application to autonomous surface crafts[J].IEEE Journal of Oceanic Engineering, 2011, 36(2): 347-363.
[7] FERREIRA H, ALMEIDA C, MARTINS A, et al. Environmental modeling with precision navigation using ROAZ autonomous surface vehicle[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems. Portugal: IEEE, 2012: 1-6.
[8] DANIEL T, MANLEY J, TRENAMAN N. The wave glider: enabling a new approach to persistent ocean observation and research[J].Ocean Dynamics, 2011, 61(10):1509-1520.
[9] 金久才,张杰,马毅,等.一种无人船水深测量系统及试验[J].海洋测绘, 2013, 33(2): 53-56.
An Unmanned Surface Vehicle for Ocean Environment Monitoring and its Oceanic Application
JIN Jiu-cai1, ZHANG Jie1, SHAO Feng1,2,CUI Ting-wei1
(1.TheFirstInstituteofOceanography,StateOceanicAdministration, Qingdao 266061, China; 2.CollegeofInformationandControlEngineering,ChinaUniversityofPetroleum, Qingdao 266580, China)
USV (Unmanned Surface Vehicle) is a new kind of multifunctional platform for oceanic monitoring and can measure ocean parameters continuously by remote or autonomous control. The USBV (Unmanned Surface Bathymetry Vehicle) is built for environment monitoring in the lake and offshore area, which is designed as a twin hull vehicle and propelled by two thrusters. By using the USBV which carried a beacon differential GPS, a single beam echo sounder and a CTD, autonomous measurements of water depth, temperature and salinity were carried out in the Danglu reservoir and the sea area around Lian Island of Lianyungang City from October to November in 2014. Through these measurements, the feasibility and automaticity for the USBV to be applied in ocean environment monitoring are verified.
Unmanned Surface Vehicle; environment monitoring; bathymetry; measurements of temperature and salinity
1002-3682(2015)03-0087-06
2015-03-25
国家自然科学基金项目——无人船平台动态接入海床基观测网及数据回收研究(61401111);海洋公益性行业科研专项——核辐射无人船观测系统研制及海水137Cs快速检测方法研究(201505005-2);中央级公益性科研院所基本科研业务费专项——无人船平台动态接入海床基观测网及数据回收研究(2015P08)
金久才(1983-),男,助理研究员,博士,主要从事无人船研发与应用方面研究. E-mail:jinjiucai@fio.org.cn(李 燕 编辑)
P715.4
A
