关于声阵列定位技术的研究
2015-02-15山西中北大学机电工程学院马秀春
山西中北大学机电工程学院 马秀春
1 引言
随着军事隐身技术的蓬勃发展,使得车辆、飞机等作战武器很难被发现。所以,我们需要研究出能够识别并跟踪隐身目标的设备,才能够解决反隐身这个问题。然而,现阶段大多数的光学和雷达探测方法对于陆地上行驶的车辆和超低空飞行的飞机来说并没有很好的效果,有时甚至无法识别目标位置。此外,雷达工作时要发射电磁波,使得探测的隐蔽性不好。考虑到发动机是车辆和飞机必不可少的零部件,并且其在工作中产生的噪音也无法完全被消除,因此我们便想到利用发动机发出的声音信号来对作战目标进行定位和跟踪。因此,有必要研究被动声探测系统。
现阶段,大多数的被动声定位都是通过时延估计来实现的,因此,时延估计算法便是我们所要解决的关键技术。本文研究了定位原理及定位系统,并利用各个传感器接收到信号的时间差计算定位方程,最后通过误差方程对定位精度进行分析,以便将目标控制在相对准确的范围之内。
2 定位原理
通过将传感器布置成一定几何形状的阵列,用来接收目标所发出的声场信息,然后利用各个传声器所测得的信号之间的时延来确定目标的具体方位,这便是被动声定位的定位原理。由于十字形阵列具有分维持性,且阵列冗余度也较小,因此,本文采用平面四元十字阵进行分析,如图1所示。
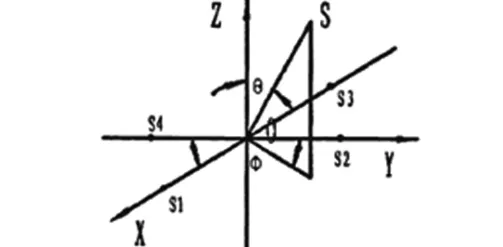
图1 平面四元十字阵阵形图
设目标声源的直角坐标为(x,y,z)、球坐标为(γ,φ,θ),即目标到坐标原点的方位角为φ(0≤φ≤360°),俯仰角为θ(0≤θ≤90°),D为十字阵对角线阵元之间的距离。同时设目标为点声源,则令噪声信号到达第一个传感器S1所花费的时间为t1,而相对于S1而言,声信号到达S2的时延为τ12,以此类推。另外,用R表示目标到坐标原点的距离。那么俯仰角θ,方位角φ 与时延τ12、τ13、τ14及阵元间距D的关系式可推导如下:

将直角坐标转化为球坐标可得出目标方位角和俯仰角信息。声定位过程框图参见图2。
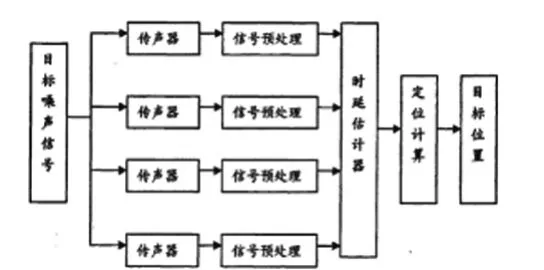
图2 声定位过程框图
3 被动声定位公式
令ri(i=1,2,3,4)表示第i个传声器与目标中心之间的距离,结合式1可得距离:

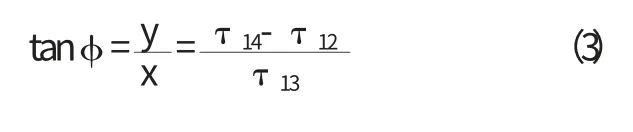
对式1进行变换得到方位角的表达式为:
令m=sinθ,即设sinθ 的估计值为m,经计算得到俯仰角的计算公式为:

4 定位精度分析
4.1 时延估计误差对目标定位精度的影响
主要引起时延估计误差的因素有:(1)因为时延估计算法所产生的时延估计误差;(2)由于测量系统各通道之间的相位差引起的时延估计误差。(3)声信号传播起伏引起的时延估计误差。
4.2 方位角估计精度

由式3经推导计算得到目标方位角估计的均方根误差为:角影响的问题。由此可见,想要提高目标方位角的估计精度,我们可以通过适当地增大阵的尺寸L或者增大目标的俯仰角来实现。同时也证明了该方法有利于地面目标的方位估计。
4.3 俯仰角估计精度
由式4经推导计算得到目标俯仰角估计的均方根误差为:
该式表明,时延估计误差、目标的俯仰角以及声阵尺寸是目标方位角估计精度的主要影响因素,而与目标的方位角无关,克服了四元十字阵定向时受目标方位

该式表明,时延估计、目标俯仰角和阵列尺寸是影响目标俯仰角估计精度的主要因素。同样,想要提高目标俯仰角的估计精度也可以通过增大阵尺寸来实现。这里我们要特别注意的是,目标俯仰角的估计精度是随着俯仰角的增大而下降的。
4.4 距离估计精度
经推导计算得到目标距离估计的相对误差为:

该式表明,目标距离、目标俯仰角、阵列尺寸以及时延估计精度是影响目标距离估计精度的关键因素,而目标的方位角并不会对其精度造成影响。我们依然发现,目标的定距精度是随着阵尺寸的增大而提高的。另外,将阵尺寸和时延估计精度条件固定之后,距离的估计精度会随着目标与声阵距离的增大而有所下降。
5 总结
综上所述,在条件允许的情况下,我们要适当地增大阵的尺寸,同时尽可能地预先估计目标的方位与走向,用以提高声阵列技术对目标的定位精度。
[1]张卫平.声被动位置估计方法研究[D].南京:工程兵工程学院博士论文.2004.
[2]H.Chen,J.Zhao.On locating low altitude moving targets using a planar acoustic sensor array.Applied Acoustics,2003,64(11):1087-1101.
