烟草异物剔除系统中实时低照度图像增强算法
2015-02-08张绍堂宁德琼
张绍堂,宁德琼,王 磊
1.曲靖师范学院计算机科学与工程学院,云南省曲靖市麒麟区三江大道 655011
2.红云红河(烟草)集团曲靖卷烟厂,云南省曲靖市大坡寺 655000
卷烟制丝生产线、打叶复烤生产线采用的烟草异物剔除系统,主要用于自动识别并剔除烟叶中混杂的异物(如麻绳、纸片、鸡毛、虫蛹、塑料等),剔除性能良好,异物剔除率达到97%[1],有效提高了烟叶纯净度和产品品质。烟草异物剔除包括图像获取、图像采集及处理、异物识别、颜色分选表建立、异物剔除等步骤[2-3],但该系统在使用一段时间后照度会有不同程度的衰减,使系统获取的图像品质降低,导致异物剔除率下降和烟叶带出率升高。由于低照度图像灰度范围较窄,相邻像素的空间相关性高,灰度变化不明显,进而影响后续的图像识别、理解与判断,因此对低照度图像进行增强处理具有重要意义[4]。在系统维护过程中,采用缩短光源与物料间的距离或更换新光源可以解决低照度所产生的影响,但容易增加系统维护难度和成本。在图像获取和图像采集及处理之间增加图像增强功能目前已有较多研究,例如PCNN[5-6]、Retinex[7-10]、直方图均衡、同态滤波[11-12]等算法。但上述算法的实时性都较差,不适合应用在烟草异物剔除系统中。为此,采用优化的同态滤波算法,通过引入自适应参数对不同照度的图像进行拉伸,有效校正低照度图像的颜色、对比度和亮度,以期进一步提高系统的剔除性能。
1 照度对剔除性能的影响
照度对烟叶图像品质具有直接影响。当光源亮度较好时,平均照度约为15 000 Lx,图像自然,颜色真实,有利于异物的识别;当光源亮度不足时,平均照度约为5 000 Lx,摄像机采集的图像整体偏暗。对光源亮度不足和更换新光源分别进行异物剔除实验,结果见表1。可见,光源衰减后异物剔除率从94.0%下降到86.4%。其中,对颜色与烟叶接近的黄色(黄色皮带、纸箱板、木材)和与背景颜色接近的红色等异物的剔除影响最突出。此外,对黑橡胶、霉变烟叶、麻绳、稻草等异物的剔除影响也较明显。
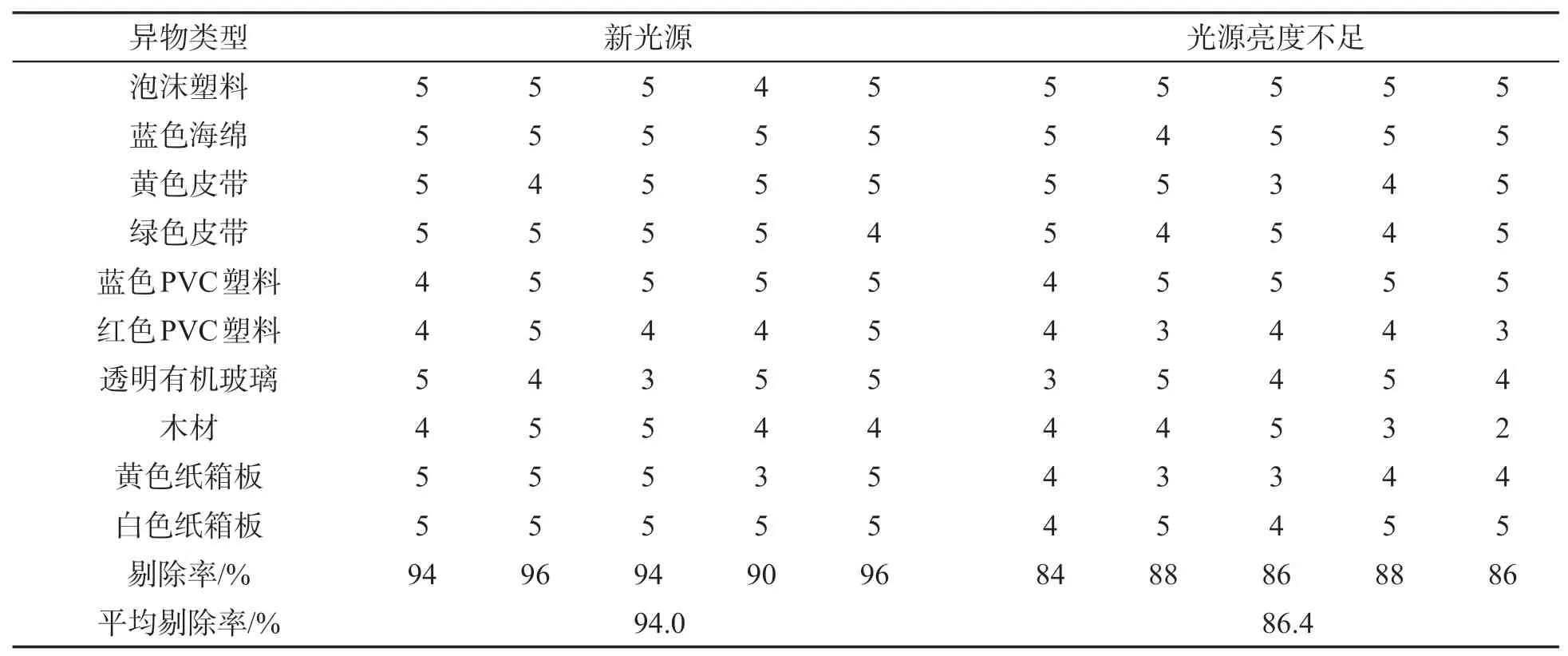
表1 光源亮度降低前后异物剔除数量① (个)
2 低照度烟叶图像增强算法
烟草异物剔除系统实时性要求较高,对烟叶图像增强要兼顾增强效果和处理效率。实验表明[13-14],高斯同态滤波算法增强效果较明显,处理速度也更快。
2.1 高斯同态滤波原理
同态滤波算法是把频率过滤和灰度变换结合起来的一种图像处理方法,以图像照明-反射模型作为频域处理的基础,通过压缩亮度范围和增强对比度来改善图像的品质[15]。从图像的形成和光特性考虑,一幅图像由光源的入射分量i(x,y)和目标物的反射分量r(x,y)组成,其数学模型为:

式中:i(x,y)的性质取决于成像物体的表面特性。
一般来说,光照条件体现在入射分量i(x,y)中,r(x,y)变化缓慢,其频谱主要落在低频区域;而r(x,y)反映图像的细节等特征,其频谱主要落在高频区域。处理照明不足或光照不均的彩色图像时,就要从f(x,y)中将i(x,y)和r(x,y)分开,分别采取压缩低频、提升高频的方法,减弱照度分量、增强反射分量,从而使图像清晰[13]。
同态滤波的具体实现过程是先对待增强图像取对数,然后进行傅立叶变换,在频域中利用同态滤波器进行滤波,最后通过逆傅立叶变换及指数变换得到增强后的图像,见图1。

图1 同态滤波过程框图
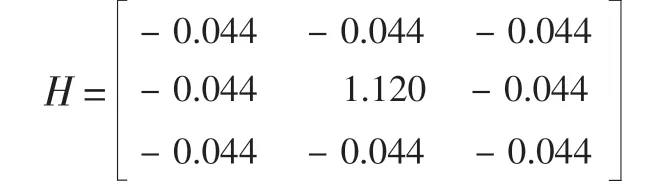
在同态滤波过程中,能否达到理想的滤波效果,取决于同态滤波函数H(u,v)的选择,合适的H(u,v)对同态滤波算法的效果具有关键影响。文献[14]中对同态滤波函数H(u,v)进行优化后得到了高斯同态滤波函数:

式中:m,n为动态算子;当rH>1,0<rL<1时,图像的低频分量减小,高频分量增强,使得动态范围压缩和对比度增强;常数c 用来控制滤波器函数斜面的锐化;D0为截止频率,可以根据需要选取。

式中:M × N为待处理图像大小。
由于高斯同态滤波需经过两次傅里叶变换,占用较大的运算空间,因此对同态滤波算法进行了优化。
2.2 优化的同态滤波算法
将同态滤波放到空间域上进行操作和实现,具体步骤[15-17]如下:
(1)获取源图像的V分量:

式中:R,G,B为系统所采集RGB(Red-Green-Blue)图像的3个分量。
(2)利用对数变换将入射光和反射光分开:

(3)通过空域三维窗实现低通滤波:

利用低通滤波器可实现平滑图像、去除噪声的目的,对光照不均也具有均衡作用。
(4)由于被处理图像经过对数变换,再用幂变换将图像进行恢复:

(5)采用归一化处理降低光照不均造成的干扰:

(6)完成实时低照度图像增强,必须设计一个自适应参数μ。通过自动调整μ 值,可以将不同照度的图像拉伸到同一亮度级别,以满足系统实时性需求。不同照度的图像V分量的平均灰度值不一样,照度较低的图像灰度平均值较小,增强的幅度较大;照度较高的图像灰度平均值较大,增强的幅度较小。因此,灰度平均值与μ 成反比。灰度值一般介于0~255 之间,取128 为平均灰度标准值,通过实验可得出μ的计算公式:

式中:s″(x,y)为V分量增强的最终结果。
(7)将HSV(Hue-Saturation-Value)快速转换至RGB。定义参数矩阵r=s″(x,y)/V× 256,原RGB 空间内图像的R,G,B 3 个分量分别与参数矩阵相乘后,得到3个新分量:

新的R',G',B' 分量重新组成RGB图像就是在HSV 空间内增强后的图像。通过构造参数矩阵r,复杂的浮点数由除运算转换为乘运算,减少了运算量,提高了算法的运算效率[4]。
3 烟叶图像增强实验
3.1 实验设计
采用加拿大DALSA公司CCD可编程彩色线阵相机TR-33 采集图像,有效像素2 048 pixel,像素尺寸14 μm×14 μm,行扫描速率21/11 kHz,具有景深大、视野宽、灵敏度高、清晰度高和低噪声等特点。光源是美国MERCRON 公司型号为FN2376-4 的荧光灯,输出频率60 kHz,长1.2 m,可以满足CCD 彩色线阵相机扫描频率11 kHz 和宽度0.8 m的有效工作范围。
DALSA 线阵CCD 相机在照明系统的辅助下,对在高速皮带上以5 m/s 抛出的烟叶进行扫描,相机所获得的RGB 信号通过专用HONDA 口数据线送入图像采集卡,经数据处理后,再经总线送入并行四通道DSP 处理板,对图像数据进行实时处理。总线采用专用辅助总线,速率达400 MB/s。
一般情况下,光源使用3 个月后照度衰减至75%,6个月后衰减至50%。在荧光灯上添加带有输出信号的光阻PDR-47T,照度在75%~100%范围内。光阻可保证照度为75%的均匀光,当照度低于75%时更换光源。选择一台已安装调试完成的异物剔除系统,在线采集烟叶图像3次(时间间隔2个月),得到不同照度的低照度图像。系统中图像缓存预设为512 pixel×2 048 pixel,综合考虑处理效果,将图像缓存更改为128 pixel×2 048 pixel。用本算法进行图像增强测试,测试环境主参数为Visual C++6.0,CPU 3.4 GHz,内存4 GB。
3.2 结果分析
对在线采集的3 张不同照度图像进行增强处理,效果见图2。可见,本算法能有效校正低照度图像的颜色、对比度和亮度,且都处于同一亮度水平,具有较强的自适应性。照度越低,需要增强的幅度越大,即μ 值越大。从图2 中增强前直方图可以看出,图像像素值向高像素区域拉伸,图像a特别明显,而图像b,c拉伸幅度相对较小,该趋势与自适应参数μ 的变化一致。不同算法对不同尺寸图像增强性能对比结果(表2)表明,本算法与其他增强算法相比运算速度更快,能较好地满足实时彩色图像的增强需求。
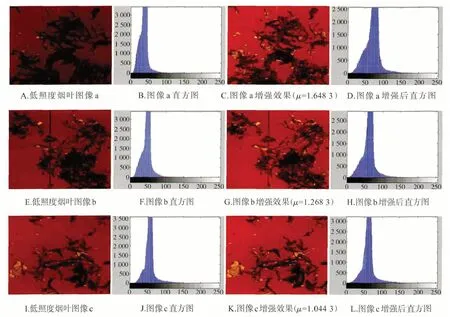
图2 不同照度烟叶图像增强效果及直方图对比

表2 低照度图像增强算法速度对比 (s)
4 结语
低照度对烟草异物剔除系统的性能影响较明显。硬件技术的快速发展和低照度图像增强算法的成熟,使得实时系统中低照度图像增强成为现实。低照度图像的增强不仅能够较好地保持系统的剔除性能,同时还能提高系统的可维护性、易操作性,对进一步提高卷烟品质具有重要意义。该算法还可用于卷烟小包、条包在线检测等视觉系统中,但对基于颜色特征的识别系统其效果更为显著。
[1]张绍堂,董德春,任友俊,等.烟草异物剔除系统中典型异物处理方法[J].烟草科技,2009(5):22-25.
[2]唐向阳,张鹤松,张勇,等.基于机器视觉技术的智能烟草异物剔除系统[J].机电工程技术,2006,35(12):84-85,99.
[3]张绍堂,蒋作,郑智捷.机器视觉技术在烟草异物剔除系统中的应用[J].云南民族大学学报,2007,16(2):161-164.
[4]潘平平,李德华.快速低照度图像增强算法研究与实现[J].微型机与应用,2012,30(5):42-45.
[5]张煜东,王水花,周振宇,等.基于HVS与PCNN的彩色图像增强[J].中国科学:信息科学,2010,40(7):909-924.
[6]陈锐,马义德,郑晓,等.基于PCNN和视觉特性的图像对比度增强[J].微计算机信息,2010,26(4-1):108-112.
[7]程芳瑾,杜晓骏,马丽,等.基于Retinex 的低照度图像增强[J].电视技术,2013,37(15):4-10.
[8]肖进胜,单姗姗,段鹏飞,等.基于不同色彩空间融合的快速图像增强算法[J].自动化学报,2014,40(4):697-705.
[9]江兴方,王戈,沈为民.一种色彩改进型Retinex彩色图像增强方法[J].光电子·激光,2008,19(10):1402-1404.
[10]许欣,陈强,孙怀江,等.快速Retinex 彩色图像增强[J].计算机工程与应用,2010,46(5):4-6.
[11]禹晶,李大鹏,廖庆敏.基于颜色恒常性的低照度图像视见度增强[J].自动化学 报,2011,37(8):923-930.
[12]韩丽娜,熊杰,耿国华,等.利用HSV 空间的双通道同态滤波真彩图像增强[J].计算机工程与应用,2009,45(27):18-20.
[13]郭清宇,彭芳芳.指针式仪表图像高斯同态滤波增强算法研究[J].中原工学院学报,2013,24(5):1-4.
[14]焦竹青,徐保国.HSV变换和同态滤波的彩色图像光照补偿[J].计算机工程与应 用,2010,46(30):142-144.
[15]马龚,张成义.基于Matlab的同态滤波器的优化设计[J].应用光学,2010,31(4):584-587.
[16]刘春香,李洪祚.实时图像增强算法研究[J].中国光学与应用光学,2009,2(5):395-401.
[17]肖俊,宋寿鹏,丁丽娟.空域同态滤波算法研究[J].中国图象图形学报,2008,13(12):2302-2306.