激光测量车技术在工程测量中的应用
2015-02-07秦庆伟
秦庆伟
(1.湖南省第一测绘院,湖南 衡阳 421001)
激光测量车技术在工程测量中的应用
秦庆伟1
(1.湖南省第一测绘院,湖南 衡阳 421001)

三维激光扫描技术是目前最先进的测绘新技术之一,能够快速、精确地记录建筑物三维空间信息。介绍了车载三维激光测量系统的构成及测量原理,通过实例阐述了其特点及应用,可为相关测量提供借鉴和参考。
激光扫描;测量车;工程测量
1 三维激光测量车
车载三维激光测量系统精度优于5 cm,每个激光头激光光脉冲能够达到200 000 Hz,解析度达到1 cm。三维激光测量车系统中具有双传感器设计,测量的死角非常小。动态LiDAR测量车Lynx Mobile Mapper整合了1个定位与导航系统和2个ILRIS-3D激光扫描器,能够快速、精确地确定背侧物体。车顶部固定1台惯导、GPS天线和传感器,这种安装方式便于后期的仪器维护。三维激光测量车的特点在于拥有2个GPS天线,能够确定行使方向,测量单元能够控制测量误差,并提供信息更新。
本研究采用湖南省第一测绘院Lynx车载三维激光扫描系统,仪器是Optech。该系统有一个多传感器集成系统,包括同步控制单元以及遥感传感器等。车轮编码器ODO、惯性测量单元和GPS构成定位定姿传感器,获取时间、平台位置以及姿态等信息。遥感传感器采用了全景相机和激光扫描仪两部分。三维激光测量车包括VZ-400激光扫描仪和LMSQ120激光扫描仪,VZ-400激光扫描仪安装在车体的右后方,主要是获取目标点云信息;LMSQ120激光扫描仪主要是获取地表面点云,激光扫描仪的安装使用能够满足全方位场景下信息的获取。
车载系统所有传感器都安装在移动平台上面,由车载计算机系统进行控制。计算机系统建立各个传感器之间的几何关系,并保持各传感器的时间一致,运动和姿态同步。在三维激光测量车以一定速度运动的过程中,各个传感器的位置以及姿态数据信息通过POS系统记录,全景影像通过地面激光雷达和全景相机获取,三维激光测量车实现全方位场景下信息的快速获取。
2 三维激光测量车在工程测量中的应用
2.1 在外业数据采集中的应用
提前做好卫星星历预报以及绘制卫星环视图等工作,选择信号较好的时段采集数据,检查各个仪器的工作状态,进行POS系统的初始化,完成GPS信号的对齐工作,开启全景相机以及扫描仪,并设置各参数。VZ-400扫描仪固定在一个角度上进行扫描,在数据采集的过程中,注意观察GPS卫星信号、点云以及影像数据的采集。为保证数据采集的精度,在采集工作完毕后,需要停止一段时间。
POS数据主要是利用软件进行解算获取车载系统的信息。先将GPS分量与GPS数据进行差分处理,将处理结果与IMU数据进行紧耦合处理,得到高精度的位置以及姿态数据。在多传感器数据融合处理中,三维激光测量车系统对地面高速扫描,记录扫描的时间、角度等,利用Waypoint软件处理POS数据,利用激光扫描仪的外参数进行点云定位定姿处理。
在获取高精度的车载点云和全景影像后,利用软件系统半自动化提取道路特征边线信息,导入CAD,针对路面情况较为复杂的道路,可以在变化处截取纵断面,获取更加详细的信息,并标记高程。
2.2 实例分析
本研究实测的对象是湖南省怀化市境内高速公路及城区道路,使用中为了更好地控制和检查车载激光扫描的精度,需要在道路两侧铺设一些靶标点,在布置中可以选择道路沿线的特征点进行,如公路的急转弯点、建筑物的死角、路灯、交通标识底部等。结合路况的实际情况,靶标点设置在普通砖头和白色喷漆的结合处。激光对白色喷漆具有很强的反射强度,砖头能使激光扫描仪保持良好的工作状态。在一般情况下,以行车方向的左上角作为测量点。通过以上措施,能够保证布设的靶标控制点准确而清晰,提高点云数据的精度。靶标点需要均匀布置在高速公路的两侧,同一侧靶标点间隔小于500 m,两侧靶标点的布置呈现交叉状态。平面坐标的测量采用GPS-RTK方式,测量误差要求小于0.03 m。在靶标点的数据测量中,把控制点作为起算点。
在点云数据的采集与处理中需要注意以下问题。要求采集的数据主要包括公路点云数据、靶标数据以及基站数据。扫描车工作前,基站需要提前1 h开机初始化,并且在工作完毕1 h后,基站才关机。采样频率的设置要与扫描车上车载GPS的频率保持一致,按照要求布设并测量靶标数据。为保证点云数据的均匀性,要求扫描车匀速行使。每天外业采集的数据都要求当天进行初步检查和预处理,不合理的数据及时返工。在本次测量中,由于高速公路的扩建区域比较复杂,考虑到不同时段GPS信号差异等问题,为保证获取最佳数据,采用车载移动激光扫描分别测量双向车道,同一路段点云数据匹配精度要求在1 cm范围内,如图1所示。
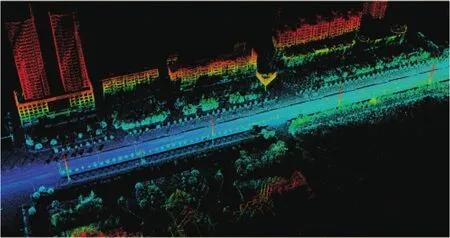
图1 怀化城区部分点云图
扫描仪采集到的数据包括了测量车实时姿态数据、点云数据等,在解算扫描仪姿态数据中利用基站GPS数据差分处理,加入靶标检测点数据提高计算精度,最后再进行测量成果的分类与整理。在点云数据的提取中,由于公路工程测量对精度要求很高,因此车载点云数据需要采取平差和精度优化处理。经过验证,点云平面精度为0.037 m,平差后精度优于0.05/0.02 m,满足要求。再通过人工提取路面特征点,精度达到0.05/0.02 m的技术要求。在高速公路路面点的测量中,采用车载移动激光扫描测量技术测量公路老路,断面数据每隔10 m提取一次。
3 结 语
三维激光测量车能够满足复杂环境的测量,使用广泛。随着科学技术的不断发展,三维激光测量车的装备也会不断更新,为测绘工作带来更多的便利。
[1] 胡云. GPS卫星定位技术及其在工程测量中的应用[J]. 科技创业月刊,2010(7):133-134
[2] 徐宁,聂倩. 利用车载三维激光测量系统进行城市道路竣工测量[J]. 工程勘察,2014(3):70-72
[3] 丁锐,牛少儒. 三维激光扫描技术在工程测量中的应用前景分析[J]. 河南科技,2014(7):18
[4] 黄燕明. GPS-RTK技术在工程测量中的应用研究[J]. 中国新技术新产品,2012(5):1-2
[5] 陈允芳,叶泽田,谢彩香,等.IMU/DGPS 辅助车载 CCD及激光扫描仪三维数据采集与建模[J].测绘科学,2006,31(5):91-92
[6] 卢秀山,李清泉,冯文灏,等.车载式城市信息采集与三维建模系统[J].武汉大学学报:工学版,2003,36(3):76-80
[7] 李德仁.移动测量技术及应用[J].地理空间信息,2006,4(4):1-5
[8] 吴芬芳,李清泉,熊卿.基于车载移动激光扫描数据的目标分类方法[J].测绘科学,2007,32(4):75-77
P258
B
1672-4623(2015)04-0130-02
10.3969/j.issn.1672-4623.2015.04.046
秦庆伟,工程师,主要从事国土资源数据库建设及基础测绘、数字城市建设工作。
2015-01-23。
