基于ADS微带短截线低通滤波器的设计
2015-02-07西华师范大学物理与电子信息学院刘小亚尹彩霞
西华师范大学物理与电子信息学院 刘小亚 尹彩霞
基于ADS微带短截线低通滤波器的设计
西华师范大学物理与电子信息学院 刘小亚 尹彩霞
本文采用微带短截线来实现分布参数的低通滤波器。在文中,介绍了微带短截线的理论基础,利用ADS软件设计出一种通带频率范围为0GHz~6GHz,通带内衰减小于3dB,在8GHz衰减大于20dB,系统特性阻抗为50Ω的微带短截线低通滤波器。并进行了优化设计,得出电路板图以及仿真结果。
低通滤波器;ADS软件;仿真结果
1 引言
目前,在无线通信系统中,如何抑制干扰滤除谐波分量,同时选择合适的信道,运用微带滤波器提取有用的频谱信号是非常重要的。系统设计的整体性能与微带滤波器性能的好坏直接相关,从而对滤波器的设计有较高的要求。然而计算机辅助软件ADS 被广泛运用,能够有效避免设计者花费大量时间进行理论推导和计算,有效缩短设计周期,提高设计效率[1]。
2 微带短截线低通滤波器的理论基础
分布参数低通滤波器可通过集总元件低通滤波器变换实现,低通滤波器采用微带短截线实现,其中科洛达(Kuroda)可以将各滤波器元件分隔开,理查德(Richard)变换将集总元件变换为传输线段。终端短路的一段传输线可等效为电感,当传输线的长度为等效关系为[2]:


3 微带短截线低通滤波器的设计实例
微带短截线低通滤波器的技术指标如下:通带频率范围0GHz~6GHz,通带内衰减小于3dB,在8GHz衰减大于20dB,系统特性阻抗为50Ω,微带线基板的厚度为2mm,基板的相对介电常数为2.7。同时,设计中要求微带线的相对磁导率为1,电导率为4.1E+7,导体层厚度为0.05mm,损耗角正切值为0.0003。
根据微带线的参数,计算出微带线的尺寸如下表所示:
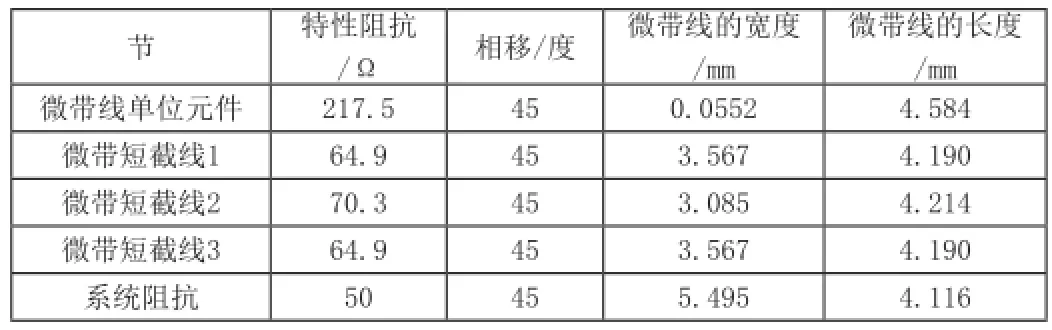
表1 微带短截线的尺寸
根据微带线的尺寸,设计的带有终端负载的微带短截线低通滤波器原理图如图1所示:
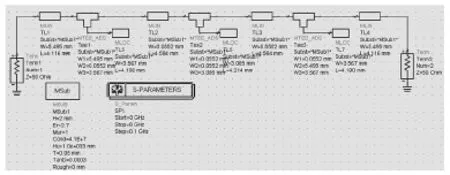
图1 带有终端负载的微带短截线低通滤波器原理图
对原理图进行仿真,得到微带短截线低通滤波器数据显示如图2所示:
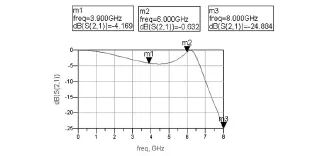
图2 微带短截线低通滤波器数据显示
图2所示的曲线在通带内的衰减大于3dB,同时在8GHz的衰减小于30dB,这样的结果不满足技术指标,需要调整原理图,调谐后的原理图如图3所示:
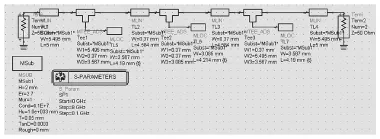
图3 调谐后的原理图
采用调谐来改变滤波器中终端开路传输线段TL5,TL6,TL7的长度,以达到合格的S21曲线。保存调谐后的曲线如图4所示:
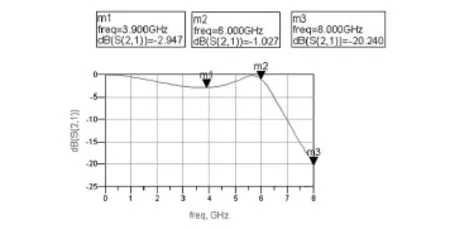
图4 调谐后的曲线
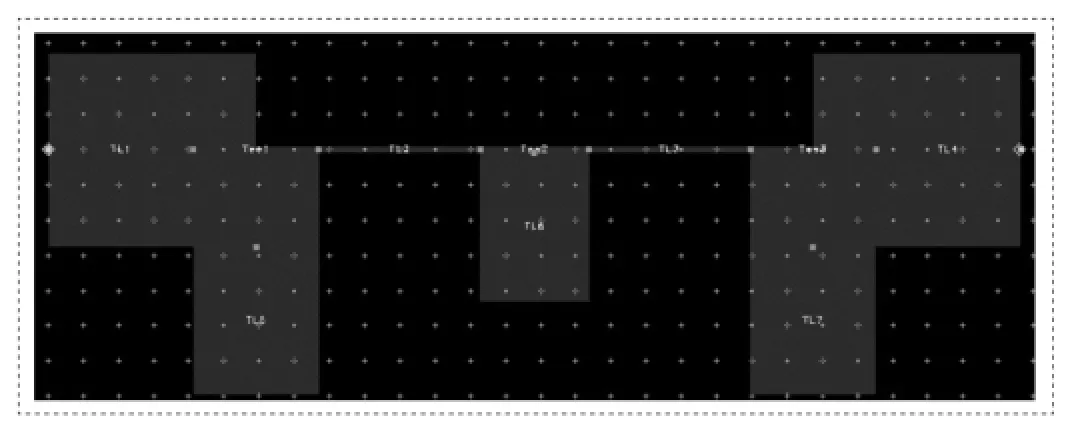
图5 由微带短截线低通滤波器原理图生成的版图
由微带短截线低通滤波器的原理图可以生成与之对应的微带短截线低通滤波器版图,生成版图时,要去掉微带短截线低通滤波器两个端口的Term和“接地”,去掉Term和“接地”的微带短截线低通滤波器生成的版图如图5所示[2]。
4 结论
本文在微带短截线的理论基础上,采用微带短截线来实现分布参数的低通滤波器。在文中,用实例阐述了如何用ADS软件完成微带短截线的设计,根据优化仿真结果知道,此设计已经满足了技术要求。这种电路结构紧凑,方法简单可行,提高了设计效率和质量。
[1]彭玉峰,林思宏,等.一种基于ADS 的微带低通滤波器优化设计[J].微波学报,2012,6.
[2]黄玉兰.基于ADS的微带低通滤波器的实现[J].西安邮电学院学报,2009(05).
[3]刘长军.射频通信电路设计[M].北京:科学出版社,2005: 174-177.
[4]周正,宋宇飞.微带线阶跃阻抗滤波电路的ADS辅助设计[J].中国新通信,2010.1.


零输入响应会按照指数规律快速衰减至零,同时零状态响应对于每个有界的输入都是有界的。更深入的分析可知,此估计值不仅说明有界输入-有界状态响应的特性,还说明了零状态响应的边界与输入边界成比例的特性。那么,对于非线性系统这一特性又将如何呢?对于一般的非线性系统来说,它们当然会具有如上的特性,即便是在无激励系统的原点全局渐近一致稳定这一特殊情况之下也是如此。
5 输入-状态稳定性的定义
让我们把系统(式1)来看成是无激励系统(式2)的扰动,并在此条件下假设无激励系统具有李雅普诺夫函数,由此来计算V对u的导数。由于u的有界性,所以存在这么一种可能,即某些情况下在半径为的球面外有可能是负的,其中取决于。但是上述内容只不过是我们希望出现的结果,而在实际中,例如当函数满足李普希茨条件时就是这样的情况。在半径为的球外的值是负的。

稳定性在电力控制系统中具有重要的地位,人们对它进行了深入的研究并提出了各种稳定性的概念。本文主要研究非线性系统的输入-状态稳定性问题,在非线性系统的稳定性概念的基础上给出非线性系统输入-状态稳定(ISS)的基本定义,为以后对电力系统稳定性深入研究打下坚实基础。
高云(1980—),女,山东临沂人,大学本科,工作于国网山东济南市历城区供电公司调控分中心,从事自动化运维工作。
