徕卡TS30全站仪测量精度测试与分析
2015-02-06覃泽颖唐诗华
覃泽颖,黄 鹰,李 保,唐诗华
(1.桂林好测信息科技有限公司,广西 桂林 541004;2.桂林理工大学 测绘地理信息学院,广西 桂林 541004)
徕卡TS30全站仪测量精度测试与分析
覃泽颖1,黄 鹰1,李 保1,唐诗华2
(1.桂林好测信息科技有限公司,广西 桂林 541004;2.桂林理工大学 测绘地理信息学院,广西 桂林 541004)

简述了徕卡测量机器人TS30及其ATR功能,研究了在短距离情况下ATR角度的观测精度、测距精度与距离的关系。结果表明,ATR测角精度随距离的增加而下降,而测距精度比较稳定。
测量机器人;TS30;ATR;测距;精度
TS30全站仪是徕卡公司第4代高精度智能型全站仪,其测距标称精度为0.6 mm+1×10-6(有棱镜模式)、2 mm+2×10-6(无棱镜模式);测角精度0.5";ATR照准精度200 m优于1 mm、1 000 m优于2 mm。自动目标识别(ATR)系统是智能型全站仪所具备的一种自动目标识别系统,在望远镜同轴上安装ATR装置并发射红外光,被反射棱镜返回,CCD相机根据反射回的信号判断棱镜是否在视场内。如果视场内无棱镜,则在马达的驱动下进行螺旋式搜索。一旦搜索到目标,CCD阵列就会将光信号转换为影像,通过图像处理算法计算出图像中心,也就是棱镜中心[1]。全站仪在马达驱动下转向棱镜,并自动精确定位棱镜中心的位置[2]。
1 TS30 ATR精度测试
ATR精度测试可以使用多种方式,如通过测量的点位中误差来衡量ATR精度[1],或通过测量控制网,利用角度闭合差来分析ATR精度[3,4]。本文使用棱镜移动量为参照,根据仪器测角的分辨率来分析ATR精度。
实验方案:在距离仪器一定距离(大约4 m、30 m、90 m、150 m)安置精密移动平台,该平台在测微尺控制下能够使棱镜横向、纵向移动,精度达0.01 mm。平台的纵轴对着全站仪方向,将棱镜置于平台上,在横向作微小移动,每次移动1个固定值,如0.1 mm。通过这个移动量和仪器到棱镜的距离,算出棱镜偏移的角度,设该角度为真值。比较每次测量的角度与真值,分析ATR的精度。每移动一次使用盘左盘右测量3个测回,3个测回的测量过程由软件控制。实验分别对大棱镜(棱镜常数为0)和小棱镜(棱镜常数为17.5 mm)进行测试。
式中,α为角度中误差("),为测站至棱镜距离(m);mA为ATR的定位精度(mm);βi为每次测量的角度(");θ为角度真值(");Md为棱镜每次的移动量(mm)。
在约4 m的距离下测量角度,测量数据见表1。

表1 4 m距离大棱镜测量数据
距离为4 m左右时,得出的角度中误差为0.734″,可得3个测回的ATR定位精度为0.01 mm,则1个测回的ATR定位精度为
同理,在30 m、90 m、150 m距离做同样的测试,由于数据量大,在此不列出。在30 m距离时每次移动量仍为0.1 mm,但随着距离增大,为保证ATR能够识别棱镜的微小移动,每次移动量应增大,所以在90 m和150 m距离下,每次移动量分别为0.2 mm、0.5 mm。数据统计结果如表2,ATR精度与距离关系见图1。

表2 不同距离下ATR精度(大棱镜)
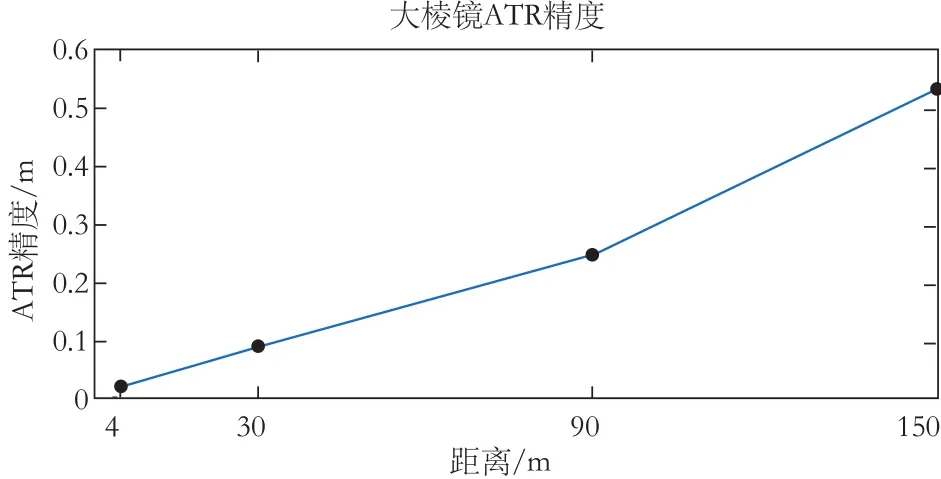
图1 TS30大棱镜ATR精度与观测距离关系图
由于数据量大,小棱镜测量数据在此不列出,测量小棱镜的ATR精度统计如表3,ATR精度与距离的关系如图2。
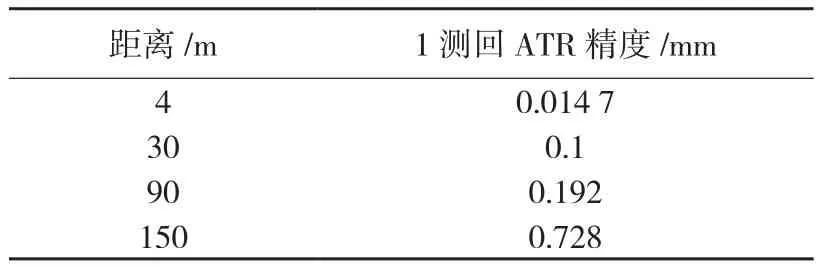
表3 不同距离下ATR精度(小棱镜)
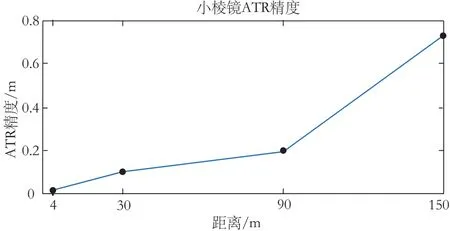
图2 TS30小棱镜ATR精度与观测距离关系图
2 TS30测距精度测试
实验方案:分别对大棱镜和小棱镜进行测试,测量距离与ATR实验相同。移动平台的纵轴对着全站仪方向,将棱镜置于平台上,在纵向作微小移动,每次移动0.1 mm。通过相邻2次测量距离的差值来统计测距精度。使用盘左盘右测量3个测回。
在此只列出大棱镜90 m测量的数据,如表4。
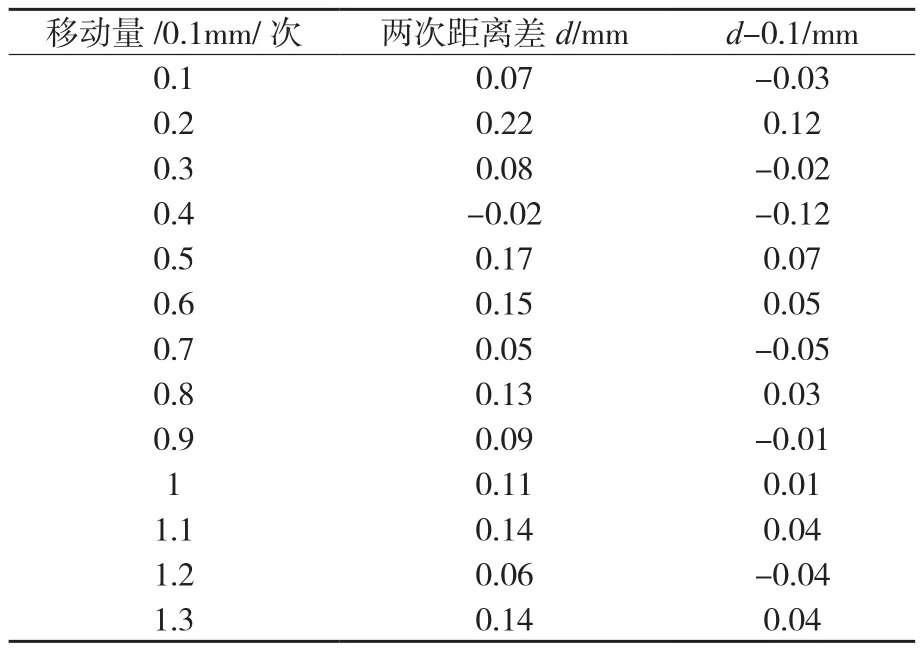
表4 大棱镜纵向移动测量数据
从表4可以看出,相邻2次距离的差值基本能够反映出棱镜的移动量,说明测距的灵敏度很高。
根据实验数据统计大棱镜与小棱镜测距中误差与距离的关系,如表5。

表5 不同距离下的测距精度
实验数据表明,在短距离情况下,TS30测距精度较高,受距离影响不大,测距精度比较稳定。
3 结 语
TS30的ATR精度随距离的增加而下降,一般观测条件下,在150 m范围内可以获得较高的精度,在观测中除了避免ATR 功能受距离的不利影响外,不良气象条件的影响也不可忽视。TS30长距离的测量精度有待进一步研究。
[1] 朱顺平,薛英. ATR 的工作原理、校准及检测[J].北京测绘,2005(3):26-29
[2] 梁远博.基于测量机器人ATR功能观测精度的实验研究[J].长春理工大学学报,2009,4(12):168-184
[3] 孙景领,黄腾,邓标.TCA2003全站仪自动识别系统ATR的实测三维精度分析[J].测绘工程,2007,16(3):48-51
[4] 黄腾,陈光保,张书丰.自动识别系统ATR的测角精度研究[J].水电自动化与大坝监测,2004,28(3):37-40
[5] 张正禄,沈飞飞,孔宁,等.徕卡新型全站仪TS30的测评和开发研究[J].测绘信息与工程,2011,36(1):52-53
[6] 梅文胜,张正禄,郭际明,等.测量机器人变形监测系统软件研究[J].武汉大学学报:信息科学版,2002,27( 2):165-171
[7] 郭际明,梅文胜,张正禄,等.测量机器人系统构成与精度研究[J].武汉测绘科技大学学报,2000,25(5):421-425
P241
B
1672-4623(2015)02-0145-02
10.3969/j.issn.1672-4623.2015.02.051
覃泽颖,主要研究方向为精密工程测量。
2014-03-27。
项目来源:国家自然科学基金资助项目(41071294)。
