多功能运载装置的分析及其实施
2015-02-02吴力科岑确富
吴力科 岑确富

摘 要:文章对多功能运载装置进行了研究,包括履带式三角轮、刹车系统和减速系統;通过三角形的稳定架构组合成了对称结构的车身,两副特制三角形轮通过转动轴承连接起来,再配合减速箱、动力系统和控制电路组成了速度可调的转动系统;结合履带式运载小车的设计思路,将其和三角轮结构结合在一起设计出履带式三角轮,它使装置在上下楼梯更平缓,另在转动轴上特设计了刹车鼓,通过刹车手柄控制刹车鼓组成了装置的刹车系统,可在装置运载重物时变得受控,可伸缩式手柄也使控制者根据不同身高的需要调节把手高度;该种运载装置不仅解决了仪器轻松上楼梯的难题,也可实现运载装置在承载重物时候速度可控,从而实现平稳下楼梯的功能。
关键词:多功能运载装置;履带式三角轮;刹车系统;减速系统
1 多功能运载装置的背景技术
文章分析的这种多功能运载装置,为涉及一种电动上下楼梯的多功能运载装置。
在日常中伴随人类生活、工作的许许多多电器、工具较重,例如冰箱、空调等,在这些笨重的电器需求量这么大的现实情况下,工人搬运成为了一道难题,往往需要三、四个人才能实现搬运,消耗了较多的人力和物力。
在供电局生产工作中,定检、试验等是常见且进行频率较高的工作内容,并且每一类型的工作所要用到的试验仪器也有多种,其中较多的试验仪器体积较大,重量较重,例如继保试验仪体积为365(mm)×400(mm)×195(mm),重量约45kg,而不可忽视的是目前所有变电站的继保室均在二楼或及以上,普通的手推车无法克服上楼梯的难题。若楼梯高且窄,加之仪器的重量,则需要人为费力的搬运。不仅仅降低了工作效率和加重了工作强度,还存在一定的安全隐患,对人身和设备构成威胁。
尽管许多人已经意识到这个问题,并且陆陆续续推出了很多电动的运载产品,但是在保证可操作性强、运载重物平缓上下楼梯等相关技术一直没有较大进展,具体存在的问题如下:在承载重物上下楼梯时,运载装置受自身重力和车身结构的影响,有十分明显的震感;在承载重物下楼梯时,运载装置受物体的重量影响,不能克服三角轮子转动的惯性,致使装置速度不可控,不能较为顺利地实现下楼梯的功能;使用电动系统的运载装置较重,移动较为笨拙;目前为止,市场上没有专门针对广东电网生产班组设计出符合尺寸的电动运载装置。
2 多功能运载装置的要求
这种多功能运载装置包括履带式三角轮、刹车系统和减速系统;它的特征如下,通过三角形的稳定架构组合成了对称结构的车身,两副特制三角形轮通过转动轴承连接起来,再配合减速箱、动力系统和控制电路组成了速度可调的转动系统;设计履带式的三角轮结构使装置在上下楼梯更平缓,另在转动轴上特设计了刹车鼓,通过刹车手柄控制刹车鼓组成了装置的刹车系统,可在装置运载重物时变得受控,可伸缩式手柄也使控制者根据不同身高的需要调节把手高度。
按照上述要求所述的多功能运载装置,其特征分别在于:文章的履带式三角轮将履带的结构和三角转动轮子结构结合起来;同时这种履带采用韧性较好的皮带作为材料;其还将鼓刹设计运用到运载装置上;涉及到的动力系统运用了质量较轻、容量较大的锂电池;其中的把手采用了可伸缩的功能设计。
3 多功能运载装置的分析
文章课题的装置针对现有技术的不足,研制开发出了一种使用方便、上下楼梯较为顺畅的运载装置。此种研制出的装置运用了下面的技术解决方案:
这种多功能运载装置包括履带式三角轮、刹车系统和减速系统;通过三角形的稳定架构组合成了对称结构的车身,两副特制三角形轮通过转动轴承连接起来,再配合减速箱、动力系统和控制电路组成了速度可调的转动系统;结合履带式运载小车的设计思路,将其和三角轮结构结合在一起设计出履带式三角轮,它使装置在上下楼梯更平缓,另在转动轴上特设计了刹车鼓,通过刹车手柄控制刹车鼓组成了装置的刹车系统,可在装置运载重物时变得受控,可伸缩式手柄也使控制者根据不同身高的需要调节把手高度。
由于采用了上述技术方案,文章提供的多功能运载装置,运用履带和三角转动的思想设计出了履带式三角转动轮,大大减轻了运载装置在承载重物上下楼梯时的震感;设计的手动刹车系统可使装置在承载重物下楼梯时,可根据运行速度和受控程度对装置速度进行调节和控制,克服了三角轮子转动的惯性影响,大大减低了运载装置受物体的重量影响,实现装置较为顺利下楼梯的功能;此外,人性化地进行对手柄进行可伸缩设计和挑选容量大、重量轻的锂电池,不仅减轻了装置的重量,并且适合不同身高控制者的使用,让装置易于控制;针对广东电网生产班组设计出符合尺寸的电动运载装置,可在广东电网生产班组推广使用。
4 多功能运载装置的具体实施方式
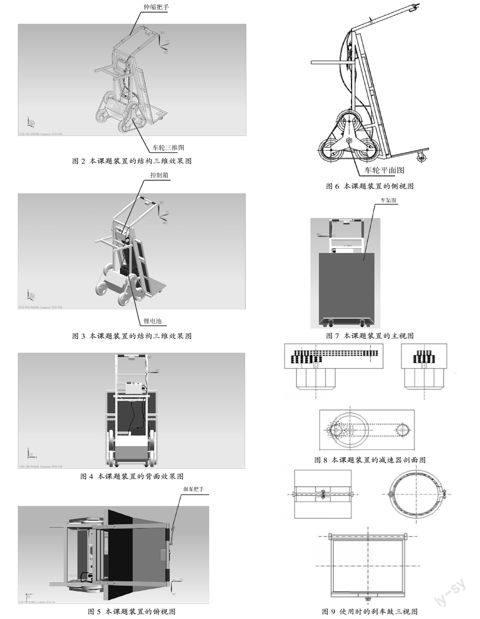
由图2~图9所示,本课题的多功能运载装置主要由车架、履带式三角轮、可伸缩把手、刹车系统、动力系统、减速系统构成,其中通过三角形的稳定架构组合成了对称结构的车架,在车身的顶部设计了根据个人身高调节的可伸缩把手,然后采用履带式技术思路设计出履带式三角形轮,再通过转动轴承将两副履带式三角轮连接起来完成了装置主车体的设计;选用2kg、容量为24V20AH的锂电池和电动机构成了装置的动力系统,配合齿轮减速机构成的减速系统就可以实现运载装置的动力控制;并且在转动轴承特制了刹车鼓,它使用了耐磨、刹车效果好的橡胶材料,刹车手柄安装在伸缩把手上。
整个车架有不锈钢钢材制造而成,经试验承载物体的重量可以达到100kg,人性化地进行对手柄进行可伸缩设计,操控者可根据身高调节手柄,使车架和楼梯平行,更为顺畅实现装置上下楼梯,操控者也更为舒适地对设备进行操控;挑选韧性较好、耐磨的传动皮带作为履带,和围绕轴承转动的三角转动轮构成履带式三角轮,三角轮之间的距离根据标准的楼梯的宽度作了调节,并且轮子圆心的连线保持了等边三角形,在轮子转动的时候保持平稳;减速系统选用了齿轮减速机,该减速机经过精密加工,确保轴平行度和定位轴承要求,形成斜齿轮传动总成的减速机配置了电机,组合成机电一体化,配合控制器和选用的锂电池构成了速度可调的动力系统;其中的刹车系统也属于本课题的一大设计,将圆形空心的刹车鼓装置在轴承上,通过安装在伸缩把手上的刹车手柄控制刹车鼓的松紧程度,从而实现对装置速度的调节,进而令装置在运载重物下楼梯时候不会因为惯性大而失控。
5 结束语
以上所述只是本课题装置较佳的具体实施方式,但是此装置的设计还有不足和缺陷,任何熟悉本技术领域的专业技术人员都能合理地根据本课题的技术方案及其设计构思加以等同替换或改变,希望本课题的设计装置能给同行带来参考与借鉴,以促使该行业的不断快速进步与发展。
参考文献
[1]达朝平,孙万田.PLC在有轨运载装置中的应用[J].青岛化工学院学报(自然科学版),2001(3).
[2]赵永强.轨道式爬楼机械装置的关键技术研究[D].哈尔滨工业大学,2005 .
[3]邹积斌.智能爪式复合行驶装置的实现策略[J].兵工自动化,2010(1).
作者简介:吴力科,男,广东恩平,汕头大学,研究生,通信与信息系统。
岑确富,男,广东恩平,长沙理工大学本科,电力系统及自动化。
