塔吊群智能防碰撞系统研究
2015-01-28陈忠孝
陈忠孝,张 盼,秦 刚,王 沛
(西安工业大学 陕西 西安 710021)
21世纪以来,各类建筑、桥梁工程的广泛发展,塔式起重机作业的智能化已成为建筑施工中不可或缺的重要组成部分。塔式起重机的应用给现代化建设提供了很多方便,智能化与自动化在塔吊上面的应用也得以推广。
塔吊群智能防撞系统是一种用于建筑或者桥梁工程,防止塔吊与塔吊、塔吊与其他障碍物体之间的碰撞,也能防止塔吊吊物侵入禁行区域的集成电子系统。对所有碰撞的可能和入侵非安全区域提供实时预警、远程地面监控、无线网络传输等多种媒介表现形式的智能测控系统装置,是现代城市建设建筑重型起重机的一种安全防护监控设备。
1 智能防碰撞系统实施方案
塔吊防碰撞运算的目标是为了能够使输出模块控制塔吊上各种电机的运行与停止。从而使塔吊吊臂、吊钩和小车的能够及时动作或者及时停止,防止塔吊司机的由于误操作造成塔吊碰撞事故。防碰撞智能系统不断采集实时数据,然后不断进行防碰撞运算,从而得出防碰撞结果,对输出模块的电机进行控制。在一群塔吊共同作业的工地上,区域中的每台塔吊都安装此监控系统。首先,事先将塔吊的一些固定参数下载到每个监控系统中储存,比如塔吊的塔身高度,两个塔吊之间的距离,吊臂的长度和平衡臂的长度等等。多台塔吊的无线通讯数据包括了自身塔高,吊钩的高度,小车的幅度和吊臂的旋转角度,这些参数都是防碰撞运算所必须的参数。然而这些参数需要通过安装在每台塔吊上的传感器测量得到[1-2]。 比如现场两两塔吊之间要实现防碰撞,需要知道相对位置关系以及两塔吊之间的几何尺寸信息,同时,还需要知道塔吊的实时动态信息,比如吊重物的高度,塔臂旋转角度,小车变幅的距离等。
安装在每台塔吊传动机构上的编码器模块将本台塔吊的塔臂回转角度,小车变幅距离,吊钩吊起重物的高度等信息经过数据采集单元的信号调理电路、数字量化过程、光电隔离器,最后输入主控制器。其他塔吊的实时状态数据通过本台塔吊安装的无线通信模块接收,并由相应接口输入至主控制器。结合事先通过主控制器输入设定的固定参数,对塔吊群中的相关塔吊的运行状态进行启停警示判定。判断的结果通过光电隔离器、继电器控制转化为相应电机的相应动作,比如电机的正转反转以及启动停止等。这样可以完成对塔吊群共同作业的安全保护工作。同时对塔吊群的实时状态信息以及终端控制器的执行动作在显示屏上进行显示,对于临界碰撞风险及时进行声光报警。塔吊群的实时状态信息通过无线通信模块输入到总控制室的计算机中,地面工作人员也可以对塔吊群运行状况进行地面监测[3-4]。单台塔吊的监控装置硬件框图如图1所示。

图1 塔吊智能防碰撞系统硬件框图Fig.1 Intelligent crane anti-collision system hardware block diagram
2 防碰撞的实现
塔吊如果有碰撞的可能,一般发生在塔吊与塔吊之间或者塔吊与障碍物之间。而塔吊与塔吊之间或者塔吊与障碍物之间的碰撞之间智能防撞系统运算的复杂程度,运算结果的准确度和防碰撞的全面性如何,关键取决于对塔吊碰撞情况的分析是否全面以及采用何种计算方法[5]。因此,每个塔吊监控装置必须实时监控自己的状态,主控制器必须采集回来实时的数据。同时,同一个塔吊群中的所有塔吊必须进行实时通讯,获取所有与自己相关的塔吊的运行状态,然后,将自身的运行状态信息与相关塔吊进行防碰撞运算,当本台塔吊与其他相邻相关塔吊有碰撞可能时,控制系统将报警或者控制本台塔吊电机的相关运动[6]。
2.1 塔吊之间的相互碰撞
接下来进行具体防碰撞分析,首先两台塔吊的位置有3种:本塔吊位置高于另一塔吊;本塔吊位置低于另一塔吊;本塔吊与相关塔吊处于同一高度。
1)当两台塔吊处于高度不同的位置时,有3种碰撞可能:①处于高位塔吊的吊绳与低位塔吊的吊臂发生碰撞;②处于高位塔吊的吊绳与低位塔吊的平衡臂发生碰撞;③处于高位塔吊的塔身与低位塔吊的吊臂发生碰撞。前两种情况可视为一种情况。下来对这几种情况进行详细分析:
(a)高位塔吊的吊绳与低位塔吊的吊臂(前臂)发生碰撞
如图2所示,其中TD1所处的位置高于TD2所处位置,S1,BF1,H1分别为TD1的转角,变幅幅度,以及吊钩高度,S2为TD2的旋转角度,D21分别为TD2的前臂长,H21,H22分别为TD2的塔臂高度,顶尖高度。
如图所示,塔吊TD1的吊绳与塔吊TD2的前臂发生碰撞必须符合以下条件:
(Ⅰ)两台塔吊的同时转到上图所示阴影区域。
(Ⅱ)TD1的吊绳高度必须小于TD2塔臂高度。
(Ⅲ)TD1的小车变幅距离与TD2的前臂长的和小于两塔吊塔身之间的距离。
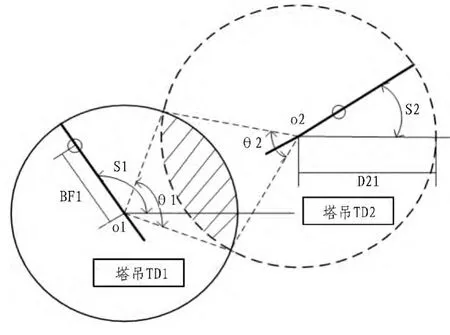
图2 高位塔吊的吊绳与低位塔吊的前臂发生碰撞Fig.2 High crane slings and lower forearm collision
(Ⅳ)TD1吊绳到TD2前臂的距离比设置的安全距离小,下图给出了防碰撞计算流程图:

图3 防碰撞流程图Fig.3 Anti-collision flowchart
(b)高位塔吊的吊绳与低位塔吊的平衡臂(后臂)发生碰撞与情况a类似,此处不再说明。
(c)高位塔吊的塔身与低位塔吊的吊臂(前臂)发生碰撞
当处于低位的塔吊TD2的前臂长大于两塔吊塔身之间的距离,并且处于低位的塔吊的前臂转到靠近处于高位的塔吊的塔身则会发生碰撞,即TD2的转角S2在θ角附近,则TD2的吊臂可能与TD1的塔身相碰撞。如图4所示。
2)两塔吊处于高度相同的位置时
若两塔吊处于高度相同的位置,可能发生的情况只有两台塔吊前臂与前臂的碰撞或者后臂与前臂的碰撞两种。如图5所示,TD1与TD2满足以下条件会发生碰撞:①两塔吊同时转图中阴影区;②TD1的前臂顶端到TD2的前臂顶端的距离小于安全距离,或者TD2的前臂顶端到TD1的前臂的距离小于安全距离。防碰撞计算方法与前述类似,在此不再详细说明。

图4 高位塔吊的塔身与低位塔吊的吊臂(前臂)发生碰撞Fig.4 High crane column and lower forearm collision

图5 两塔吊处于高度相同的位置Fig.5 Two cranes at the same height position
2.2 塔吊与障碍物的碰撞
塔吊与障碍物之间的碰撞主要存在于吊钩或者吊臂与障碍物的碰撞之间。
当塔吊的高度小于障碍物时高度时,存在吊臂与障碍物碰撞的可能性,需判断塔吊的位置,这时将障碍物视作多边形,如图6所示,障碍物ABCDE,塔吊吊臂只要不在∠OBD所在扇形范围内,则不会存在塔吊与障碍物碰撞的可能。
当塔吊的高度比障碍物的高度高时,存在吊钩与障碍物碰撞的可能,需判断吊钩与障碍物的高度。如果吊钩比障碍物高,则禁止吊钩在ABCDE区域内下降,如果吊钩比障碍物低,则禁止吊钩下放,进入ABCDE区域内。
3 数据采集模块
在塔吊的3台主要的电机传动系统中,通过电机带动齿轮使塔吊的吊臂转动,小车前进后退、吊钩提升下放等功能。为了采集吊臂回转的角度、小车位移、吊钩高度等参数,必须要能实时检测到齿轮的旋转方向以及齿轮转速与小车位移、回转角度的关系。在塔吊智能防碰撞系统中必须实时监测塔吊运行状态,塔吊在运行过程中的电机是高速运转的,因此,数据采集的速度必须要非常快,这样才能做到实时性。

图6 塔吊与障碍物的碰撞Fig.6 Crane collidewith an obstacle
对于所需数据的采集,目前常用的传感器是光电编码器。光电编码器又分为增量式光电编码器和绝对式光电编码器。
增量式光电编码器有一个中心有轴的光电码盘,其上有环形通,暗的刻线,还有一个光电发射器和一个光电接收器分布在光电码盘的两侧,当光电码盘每旋转单位的角度时,光电接收器就会收到一个脉冲信号,如果以一个参考点计数脉冲,便可得到旋转的角度[7]。
绝对式光电编码器也有一个上面有着环形通、暗刻线的光电码盘,但其上面的刻线以2线、4线、16线…n线排列,称为n位绝对式光电编码器,通过读取每道刻线可获得2的零次方到2的n-1次方的唯一的二进制编码。这种编码器由于每个位置的编码都是唯一的二进制编码。这种编码器由于每个位置的编码都是唯一的,所有无需断电前记忆角度位置,重新上电后直接读取当前的角度即可,且中间一直不用计数,计数结果只跟停止位置有关。如图7为增量式光电编码器输出波形:
增量式编码器是一种测量电机转速和转向的常用传感器器件,它的特点是分辨率高、响应速度快并且输出信号稳定。增量式编码器发出的2路脉冲是正交的,也就是2路脉冲为相位差为90度的方波。系统通过判断2路脉冲的相位关系,就可以获得电机的旋转方向。
本系统设计中采样频率为500 Hz,每2ms产生1个定时中断。由于系统的时钟节拍已经设置为1ms采集1次,为了不使频繁的定时器中断影响系统任
务的正常运行,因此设置相当于2个时钟节拍的定时中断。因为使用此采样率,所有系统所使用的编码器线速必须小于 125 Hz。
整个的数据采集过程由定时器中断服务子程序和数据采集系统共同完成。
4 系统的软件设计

图7 增量式编码器输出波形Fig.7 Incremental encoder outputwaveform
为了缩短开发周期,降低开发难度,本系统软件采用C语言编写。系统采用了实时动态位置计算技术,本系统软件功能分为两大部分,预设参数部分和工作状态部分。图8给出了系统软件总体功能模块图[8]。
本系统的软件抗干扰技术主要内容包括两个方面:一方面是是采取软件方法抑制叠加在模拟输入信号中的噪声影响,比如数字滤波技术;另一方面,当由于干扰使得整个控制系统运行发生混乱,程序跑飞或者进入死循环时,采取强制措施,使程序正常运行,比如“看门狗”技术。看门狗技术也称程序运行监视程序,它可以由硬件实现,也可以用软件实现,还可以用软硬结合的方式实现,本系统采用软件实现。程序运行监视程序不应该太大,否则,会使系统过于复杂,这样就会会降低系统的可靠性。

图8 系统软件功能模块图Fig.8 System software function block diagram
塔吊群防碰撞系统对实时性要求较高,根据单台塔吊智能控制系统的功能和时序关系以及实时性要求,本文采用并行处理思想,将系统工作状态下的软件分为两个主要流程:1)通讯流程;2)数据采集与处理流程。其中,通讯流程主要负责本塔吊与其他塔吊信息的交互;数据采集与处理流程主要负责采样数据、防碰撞计算以及控制输出等。
本软件设计采用模块化编程的思想,每个功能模块完成相对独立的功能,模块与模块之间定义标准统一的接口规范,保证了各个模块独立开发,独立维护。用户也可以根据自己的需求选择其中某些功能模块,也有利于软件的后续开发。
5 结束语
本系统建立了一套塔吊群防碰撞控制系统,对工地特定区域内的多台塔吊进行防碰撞报警以及保护,满足了复杂环境下塔群的防碰撞要求,帮助塔吊操作员避免那些由于操作失误造成的严重甚至致命的事故,为建筑工地提供更为安全的施工环境。
[1]贾永峰.塔式起重机多源信息监控系统研究 [D].西安:西安建筑科技大学,2005.
[2]吕钧星,吴荣光,吕俊辉.塔吊防互撞系统[J].三峡大学学报自然科学版,2004,24(2):118-120.LV Jun-xing,WU Rong-guang,LV Jun-hui.Crane anti-collision system[J].Three Gorges University Natural Science,2004,24(2):118-120.
[3]门长根.塔机常见事故的分析与预防[J].建筑安全,2002(8):18-19.MEN Chang-gen.Analysis and prevention of common tower crane accident[J].Construction Safety,2002(8):18-19.
[4]谢建民.亡羊补牢—塔吊重大事故预防 [J].安全与健康(上),2002(7):19-21.XIE Jian-min.Remedy-tower crane major accident prevention[J].Safety and Health (top),2002(7):19-21.
[5]高志军,颜国正,丁国清.多 Agent协作环境下的任务分配[J].系统工程与电子技术,2005,27(1):134-136.GAO Zhi-jun,YAN Guo-zheng,DING Guo-aing.Multi-agent collaborative environment task allocation[J].Systems Engineering and Electronics Technology Surgery,2005,27 (1):134-136.
[6]黄敏.基于多Agent的电力远动信息实时传输的研究[D].北京:华北电力大学,2005.
[7]陈宗海,詹昌辉.基于感知、行为0的智能模拟技术的现状及展望[J].机器人,2001,23(2):187-193.CHEN Zong-hai,ZHAN Chang-hui.Based on the current situation perception,behavior intelligent simulation technology and prospect0[J].Robots,2001,23(2):187-193.
[8]三一重工股份有限公司.塔式起重机运行监控装置中国,02283215[P].2003-12-17.
