地磁、超声波复合式车辆检测器在智能停车场的应用
2015-01-23张瑞斌李敏
文/张瑞斌 李敏
引言
随着现如今经济的飞速发展,小汽车保有量的持续增加,智能停车场的概念已经在我国各大小城市悄然兴起,车辆检测器作为交通信息采集的一个重要组成部分,越来越受到业内人士的关注。车辆检测器以机动车辆为检测目标,检测车辆的通过或存在状况等数据,为智能交通控制系统提供足够的信息以便进行最优的控制。针对智能停车场的应用,本文介绍了一种利用地磁、超声波融合检测的车辆检测器,该检测器可以简单有效地检测、统计进出停车场的数量,根据总停车位数量可以计算出剩余停车位的数量。
停车场闸口车辆检测的特点
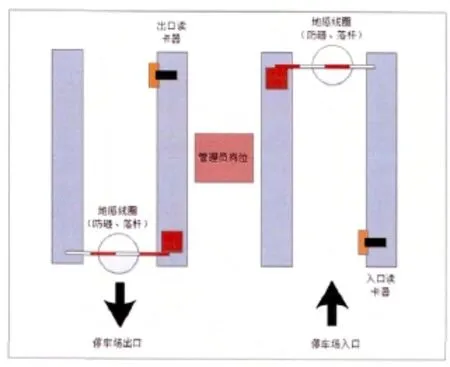
图1 停车场出入口示意图
车辆进出停车场时一般有如下特点:车速慢,并且速不均匀;两车的前后间距小,间距有可能小于50cm;每个车道均有一个闸机。
现已安装使用的停车场闸口一般使用人工控制闸机或者使用地感线圈式车辆检测器控制闸机。人工控制闸机无法及时统计进出停车场车辆的数量及停车场中已停放车辆的数量;地感线圈式车辆检测器在停车场系统中一般只用作闸机的抬杆与落杆,其无法用来统计进出车辆的数量。
车辆检测技术现状
现行的停车场系统中的车辆检测器种类较多,主要有地感线圈式车辆检测器、微波雷达车辆检测器、视频车辆检测器、红外车辆检测器、地磁车辆检测器、超声波车辆检测器等。
地感线圈式车辆检测器是目前交通领域应用最广泛、准确率最高的检测器。该技术基于电磁感应原理,具有成本低、有良好的实用性与广泛的应用性等特点,但安装及维护时需破坏路面,施工难度大。
微波雷达式车辆检测器是利用微波的多普勒效应或反射原理测量车辆的速度、距离的一种检测方式。该检测技术用于高速路检测车流,但对于智能停车场系统中的慢速车流该检测方式无法有效测量。
视频检测器是通过视频摄像机作为前端传感器,通过在摄像机采集视频图像上设置检测区域,当车辆进入虚拟检测区时使图像背景灰度值发生变化,经过处理器处理,判断出车辆的存在,并以此检测车辆的流量和速度等交通参数。该检测方式极易受天气、光线影响,并且检测系统成本较高。
红外车辆检测器分为主动式与被动式两类。被动式车辆检测器只能在其检测范围内的检测出车辆停止情形及车流量。主动式车辆检测器除摄影技术与图像式车辆检测器不同外其余特性基本一致。
由以上可以看出,地感线圈式车辆检测器及视频检测器是较适合应用于智能停车场闸口处用于车辆检测的,但这两种方案均有其各自的缺点:地感线圈式车辆检测器施工、维护困难,对路面破坏大,并且随着人力成本的提高该方案的缺点会进一步放大;视频检测器受天气影响大,整个系统的搭建复杂,系统成本高。基于检测准确性、安装难易程度、维护成本以及智能停车系统应用的特点等方面考虑,我们需要找到一种成本方面有优势又能准确检测智能停车场闸口处的进出车辆的检测器。
地磁与超声复合式检测器系统设计
概述
地磁检测是一种新型的车辆检测技术,一般使用异向性磁阻传感器(anisotropic magneto resistive),以下简称 AMR 传感器,该传感器最适合工作在地球磁场范围内。现有的 AMR 传感器可以很好地感测地磁场范围内的磁场(低于1高斯)。传感器可用来检测一些铁磁性物体如飞机、火车、汽车。其它应用包括磁罗盘、旋转位置传感、电流传感、钻井定向、线位置测量、偏航速率传感器和虚拟实景中的头部轨迹跟踪。
超声波检测器是一种已经广泛应用于汽车倒车雷达的检测技术。超声波车辆检测由超声波发射单元和检测单元组成,利用超声波发射到接收间的时间差可以计算是否车辆通过、车辆距离传感器的距离、车辆的长度、两车前后间距。该方法可以准确检测低速车辆,即完全停止的车辆也可以被检测到,但该方法仍然有一个缺点:无法分辨检测到的物体是否是一辆车。
通过分析地磁检测及超声波检测的优缺点,我们设计一种采用地磁传感器及超声波传感器的车辆检测器,这种检测器可以综合两种传感器的优点而避免单个检测的缺点。地磁传感器可以检测到通过的物体是否是一辆车,超声波传感器可以分辨通过的车辆的距离以及两辆车前后距离,综合这两个传感器的数据可以准确计数通过的车辆。
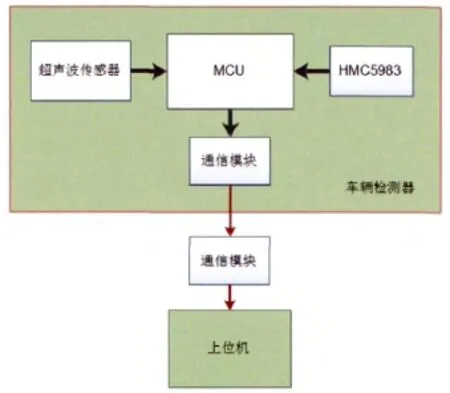
系统组成
地磁与超声复合式车辆检测器主要由MCU、地磁传感器HMC5983、超声波传感器模块、通信模块组成。通信模块可以使用RS-485,GPRS,WIFI,433MHz等通信方案,为了安装、维护方便本方案使用433MHz通信,每个检测器均有一个433MHz通信模块,检测器通过该模块与网关通信,网关再通过RS-232与上位机通信。
系统工作流程:
地磁检测的实现
本方案的使用Honeywell HMC5983测量磁场强度。Honeywell HMC5983是一个带温度补偿的三轴集成电子罗盘,被广泛应用在磁场检测、手机、自动导航和个人导航设备等领域。
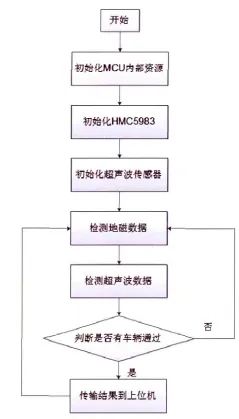
图2 系统流程框图
由于传感器本身的检测误差及温度的变化等因素,即使传感器周围的磁场强度为稳定的传感器检测到的值也会在一定范围内波动,这样需采用滤波算法处理采集到的磁场数据,经过实际模拟采用一阶滤波算法是比较简单有效的,也可以采用卡尔曼滤波算法。
超声波检测的实现
出于成本及应用场景考虑,超声波检测模块采用独立的超声波传感器及驱动、放大、比较电路实现该功能。超声波检测的原理如图3所示。
MCU发出一串频率为4KHz信号驱动超声波传感器发出超声波信号,该信号遇到障碍物后返回,该信号后经过放大、比较后被整形为方波信号,MCU通过定时器计算发出信号到接收信号间的时间差,再使用公式:(m) t/23402/×==vtd即可计算出距离。每次测得的距离经过滤波算法可得到稳定的距离值,这里的滤波算法可以使用递推滤波算法。
对于超声波检测来说,只要有物体使超声波传感器发出的超声波反射回来并且检测到则可计算出距离从而判断传感器前方是否有物体。该方法无法区分传感器前方的物体是人或者是车辆等物体。
超声波的检测范围为0.2m-2m,则超出该检测范围的物体使用该方法无法检测。
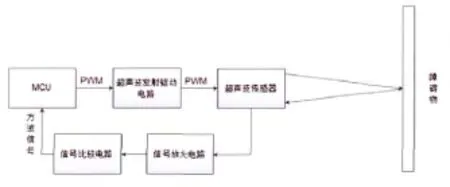
图3 超声波检测原理
检测器的安装要求
该检测器具有安装、调试方便的特点。安装时使超声波的发射方向与车辆的行驶方向垂直,检测器距离地面约60cm,汽车正常行驶时距离检测器的距离大于20cm。按如上方式安装检测有很好的效果。
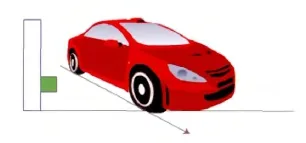
图4 检测器安装示意图
结束语
本文介绍的地磁、超声波复合式车辆检测器能较近好地继承两种传感器的优点,避免单个传感器检测造成的错误判断,在智能停车场系统中应用时相对其他检测器有安装简单、准确性高、价格便宜等特点。