终端级联式三电平逆变器降频调制方法研究
2015-01-22房明明
房 明 明
(威海职业学院信息工程系,山东 威海 264210)
0 引言
广大研究学者一直致力于多电平PWM(pulse width-modulated)逆变器的拓扑结构及其调制方法的研究[1-4]。三电平逆变器由于其成熟的拓扑结构及调制方法而倍受欢迎并逐渐应用于工业领域。学者Stemmler和Guggenbach的杰出贡献之一是提出了一种三电平逆变器可以由两台两电平逆变器经过开绕组异步电机级联得到[5],此处的开绕组异步电机是将异步电机定子绕组中性点打开,每个绕组的两个终端分别连接于两台两电平逆变器的输出端,文中称这种拓扑结构的逆变器为终端级联式三电平逆变器。
与传统的二极管钳位型(NPC)三电平逆变器相比,终端级联式三电平逆变器由于具有更多的冗余空间电压矢量、不需要钳位二极管以及不存在中点电位平衡问题等优点而被广泛研究[6-11]。采用独立直流母线结构[6-7]的终端级联式三电平逆变器虽然不存在零序环流问题,但是两台逆变器采用独立母线结构势必会增加系统的经济成本及复杂程度、降低系统可靠性和不利于系统实现四象限运行。采用公共直流母线结构(一个直流源供电)的拓扑[8-9]因其主电路结构简单以及设备成本低而更有研究价值,但是系统中的零序环流问题需要考虑。对此,文献[10-11]中采用产生零序电压为零的电压空间矢量组合参与参考电压矢量的合成,该方法虽然能够实现零序电压的完全消除,但是会降低直流电压和冗余矢量的利用率,增加系统输出的谐波含量。
本文针对共母线结构的终端级联式三电平逆变器,采用一种零序电压平均消除的调制方法,以抑制零序环流。通过理论推导出实现每个开关周期中零序电压平均消除的一个时间偏移量,该时间偏移量决定了小矢量在每个开关周期中的位置。通过交替钳位控制两台逆变器以实现开关器件的实际开关频率减半,从而降低器件的开通与关断损耗。最后对该方法进行了仿真和实验验证。
1 终端级联式三电平逆变器
终端级联式三电平逆变器的拓扑结构如图1所示,采用共母线结构。该逆变器进行调制时,两台两电平逆变器的空间矢量组合共有64(8×8)种,占据19个不同空间位置,即共有19个不同空间位置的空间矢量,如图2(a)所示,每台两电平逆变器都独立产生8个空间矢量,如图2(b)所示。图2中的数字1-8表示逆变器1的开关状态,数字1'-8'表示逆变器2的开关状态,符号“+”表示对应的逆变器上桥臂开关器件开通,“-”表示对应的逆变器上桥臂开关器件关断,同一桥臂的上下两开关器件的通断控制相反。两逆变器的开关状态见表1。
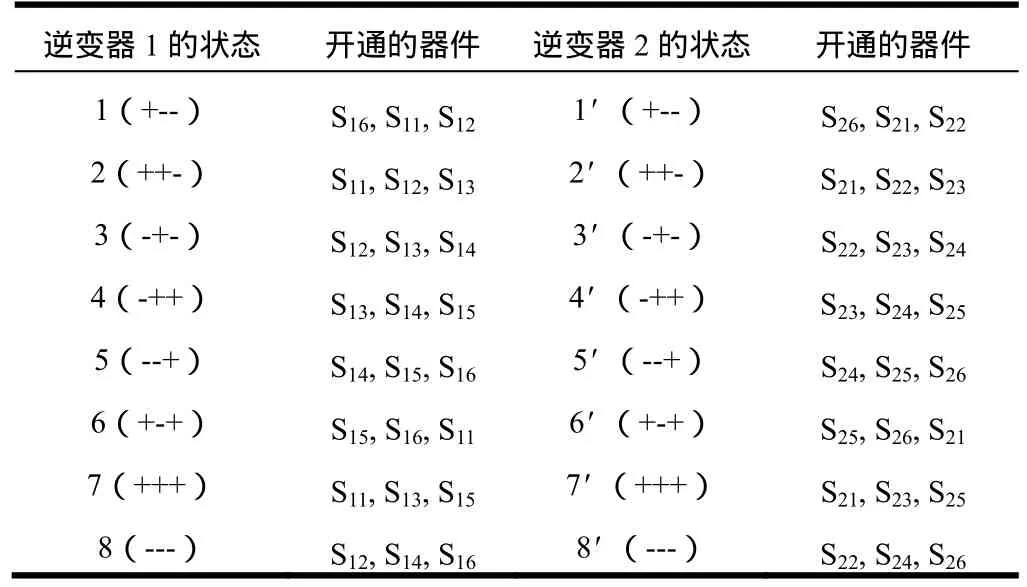
表1 两逆变器的开关状态
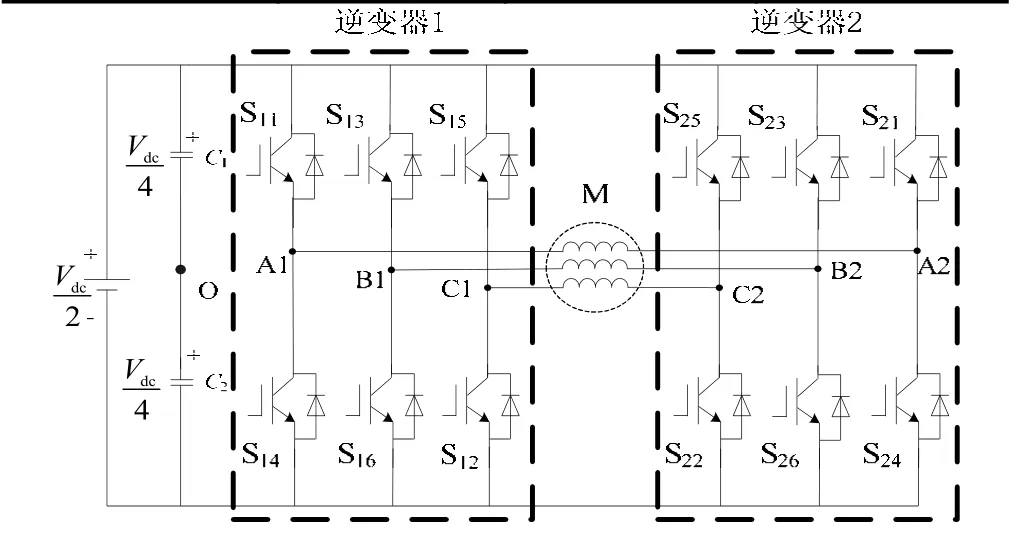
图1 终端级联式三电平逆变器拓扑示意图
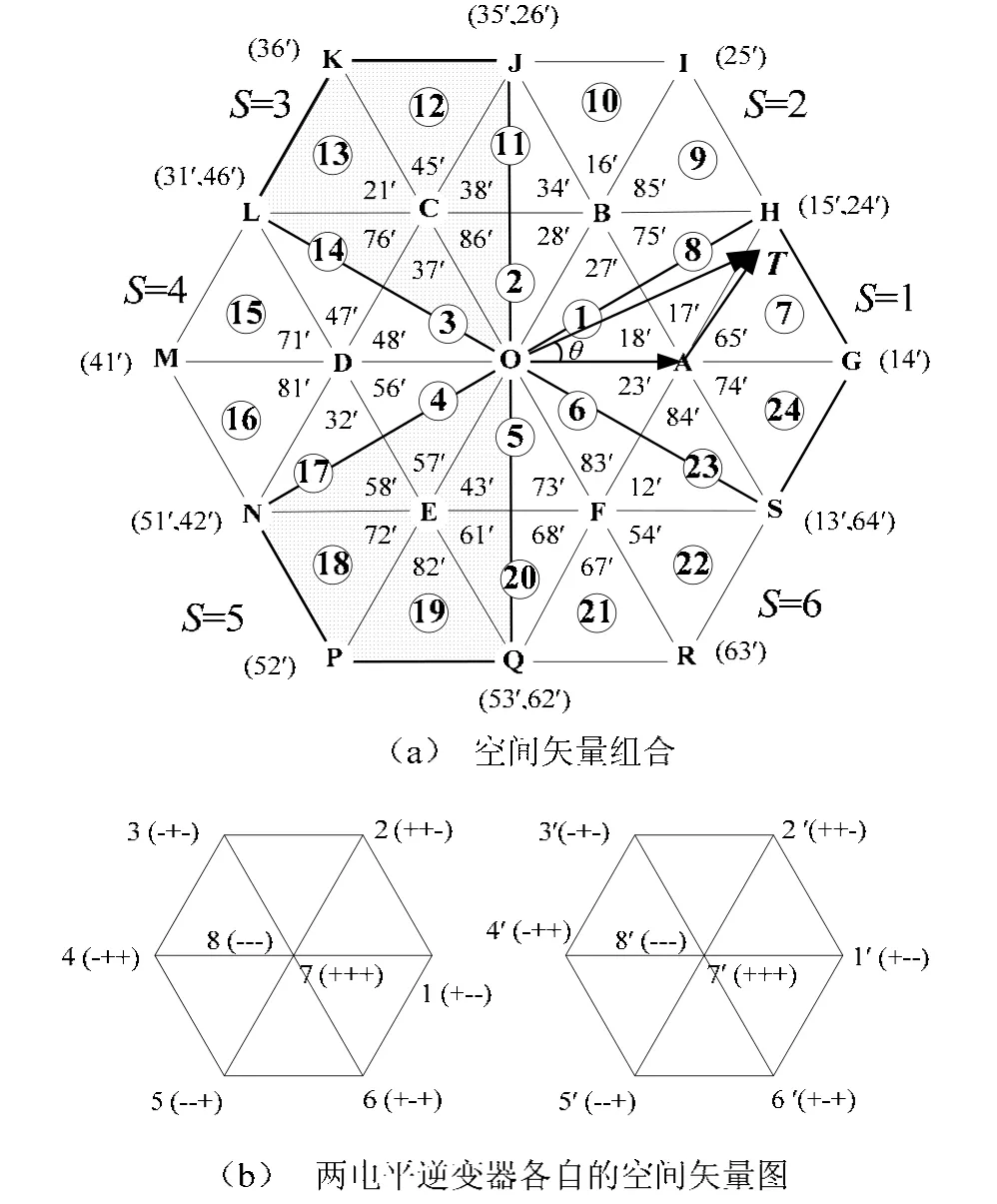
图2 空间矢量图
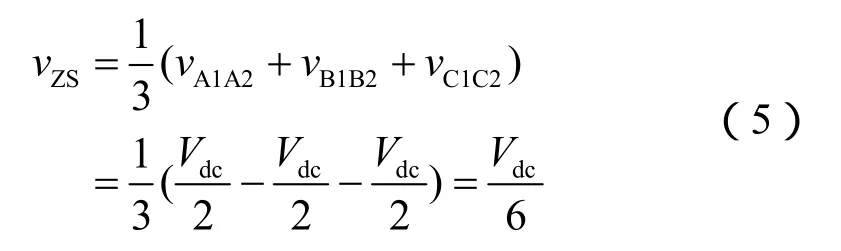
令逆变器1的三相桥臂端电压分别表示为vA1O、vB1O和vC1O,符号vA2O、vB2O和vC2O分别表示逆变器2的三相输出端电压。当两台逆变器采用如图1所示的公共直流母线结构时,系统中零序电压可表示为

例如,当空间矢量G(14')参与参考电压矢量的合成时,此时逆变器输出的零序电压计算如下

同理有

和

所以
同理可得图2(a)所示各个空间电压矢量组合各自产生的零序电压。由于两台逆变器之间的阻抗值较小,所以非零值的零序电压会在两台逆变器之间产生较大的零序环流,影响电机的正常运行。因此需要采 取措施对零序电压进行抑制。

表2 不同扇区内两台逆变器的工作模式
2 零序电压平均消除控制
文中所谓零序电压平均消除是指每个开关周期内逆变器产生的零序电压平均值为零。由于小矢量在整个调制区域内始终参与参考电压矢量的合成,而且同一小矢量始终存在所产生零序电压符号相反的一对冗余小矢量,因此可以通过改变这对冗余小矢量的作用时间来达到零序电压的平均消除。
当参考电压矢量的顶点位于如图2(a)所示的小三角形扇区中时,参与参考电压矢量合成的三个基本矢量为A、G、H,令其作用时间分别为T1、T2、T3,按照上节所述的降频调制方法,根据表3,此时逆变器1钳位输出1(+--),因此小矢量A采用17'和18'这对冗余小矢量参与调制,矢量G、H采用的矢量组合分别为 14'和 15'。令冗余小矢量 17'和 18'的作用时间分别为(1-x)T1和xT1,则一个开关周期内矢量(17'-14'-15'-18')对应的作用时间为(1-x)T1-T2-T3-xT1,根据表3,相应产生的零序电压分别为(-Vdc/3)、(-Vdc/6)、0和(Vdc/6),所以一个开关周期内终端级联式三电平逆变器输出的平均零序电压为

虽然采用传统三电平调制算法也能获得合成矢量的作用时间,但是传统三电平调制算法需要扇区判断和查表,会增加程序运行时间,程序的编写与调试相对复杂。对此,文中采用一种简化调制算法,可以通过三相参考电压即可快速获得开关器件的触发脉冲。
易知,上述开关周期内矢量组合(17'-14'-15'-18')对应的作用时间等价于矢量(7'-4'-5'-8')对应的作用时间。而矢量(7'-4'-5'-8')参与矢量TA的合成,因此只需获得矢量TA的各合成矢量作用时间即可。根据文献[12]中的矢量解耦方法,将参考电压矢量T对应的三相瞬时相电压与乘以了投影系数的直流电压(Vdc/3或Vdc/6)进行加减运算即可获得矢量AT对应的三相瞬时相电压,将该值取反即得矢量TA对应的三相瞬时相电压。令矢量TA对应的三相瞬时相电压为

根据文献[13]提出的统一快速算法,逆变器输出相电压幅值大小与该相上桥臂的假想开通时间成正比,当参考电压矢量的顶点位于如图2(a)所示区域中时,矢量TA由逆变器2输出,有如下关系存在
式中,Txs(x=a,b,c)表示开关器件的假想开通时间,由于该值可能为负值,所以称之为假想时间。因此,为得到开关器件的实际开通时间,需要在假想时间的基础上加上一个时间偏移量Toffset,如式(9)所示:

根据文献[14]可得,时间偏移量Toffset决定着冗余小矢量的作用时间分配,即决定式(6)所示x值。当时间偏移量Toffset取值为Ts/3时,式(6)所示的平均零序电压为零。
同理,当参考电压矢量顶点位于其他区域时,仍然可得使终端级联式三电平逆变器平均消除零序电压的时间偏移量取值为Ts/3。
综上可知,与传统三电平调制算法相比,上述调制方法避开了复杂的扇区判断与查表这一过程,根据三相参考电压瞬时值即可快速获得开关器件的触发脉冲。只需改变时间偏移量的取值即可达到平均消除零序电压的目的,简单快速,大大减少了程序运行时间。
3 降频调制方法
开关器件在开通与关断时刻具有一定的开通与关断损耗,因此可以通过降低器件的单位时间内实际开通与关断次数,即开关频率,来降低开关损耗。针对终端级联式三电平逆变器的特点,可以通过交替钳位控制[14]来使器件的开关频率减半,从而降低器件的开关损耗。
调制过程中,参考电压矢量的顶点运行轨迹是一个准圆形轨迹。当参考电压矢量T的顶点位于如图 2(a)所示的扇区1(S=1)中时,根据矢量解耦原理,参考电压矢量T可以解耦为小矢量A和矢量AT,它们可以由逆变器1和逆变器2分别输出。当参考电压矢量T的顶点位置发生变化时,随之改变的是矢量AT,而小矢量A的大小和方向仍然不变。因此,当参考电压矢量T位于扇区1中时,逆变器1的输出状态始终不变,可以保持各器件没有开关切换动作。
同理,当参考电压矢量T的顶点位于其他扇区(S=2,3,4,5,6)中时,参与参考电压矢量合成的小矢量分别为B、C、D、E和F。当参考电压矢量位于阴影区域(S=1,3,5)中时,逆变器1输出小矢量,否则逆变器2输出小矢量。以逆变器1输出小矢量A为例,此时逆变器1的输出状态被钳制为1(+--),逆变器2输出矢量TA,而并不是矢量AT,因为最终的合成矢量是由两台逆变器的输出矢量相减而得。两台逆变器在整个调制区域内的输出状态见表2。可以看出,整个调制过程中,始终有一台逆变器处于钳位输出状态,没有开关切换动作,因此可使器件的实际开关频率降低一半。
4 仿真与实验结果
为验证文中采用的降频调制算法的正确性与有效性,对该调制算法进行了仿真与实验验证。实验过程中,直流母线电压为 300V,控制电路采用 TI公司的TMS320F28335 DSP为主控制器,开关频率为5 kHz,采用矢量控制方式,异步电机参数如表3所示。在MATLAB中对该算法进行了仿真,仿真参数与实验参数一致。MATLAB中仿真模型的截图如图3所示,两台逆变器共用一个 300V的直流源,转速给定为1420r/min,所测定子电流和转速作为矢量控制中的反馈量。由于MATLAB模型库中没有绕组打开的开绕组电机模型,因此需要根据异步电机的数学模型和表3所示的电机参数重新搭建一个开绕组电机仿真模型。对应的实验平台照片如图4所示,其中模拟负载由磁粉制动器实现。该算法的实现流程图如图5所示。
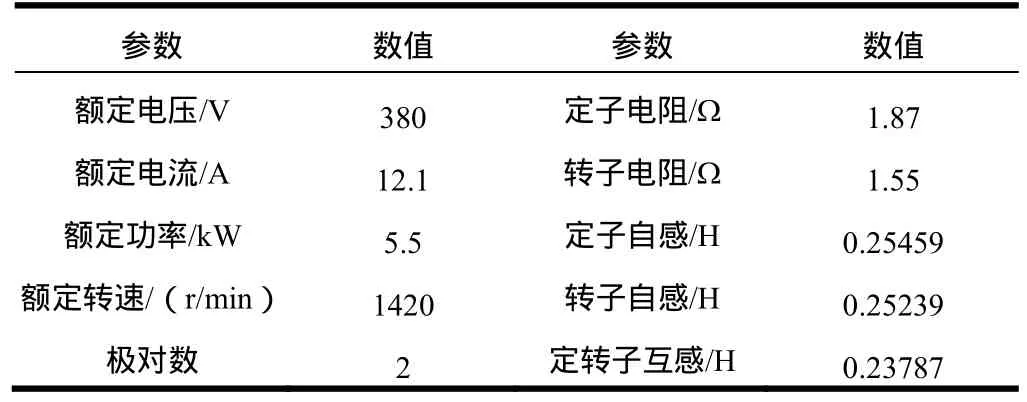
表3 异步电机参数
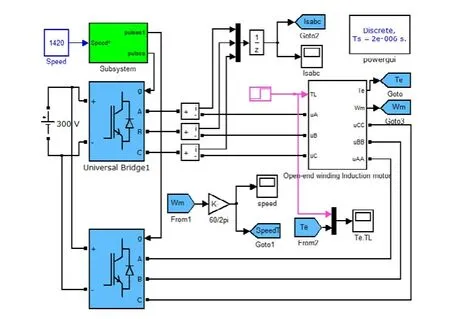
图3 仿真模型
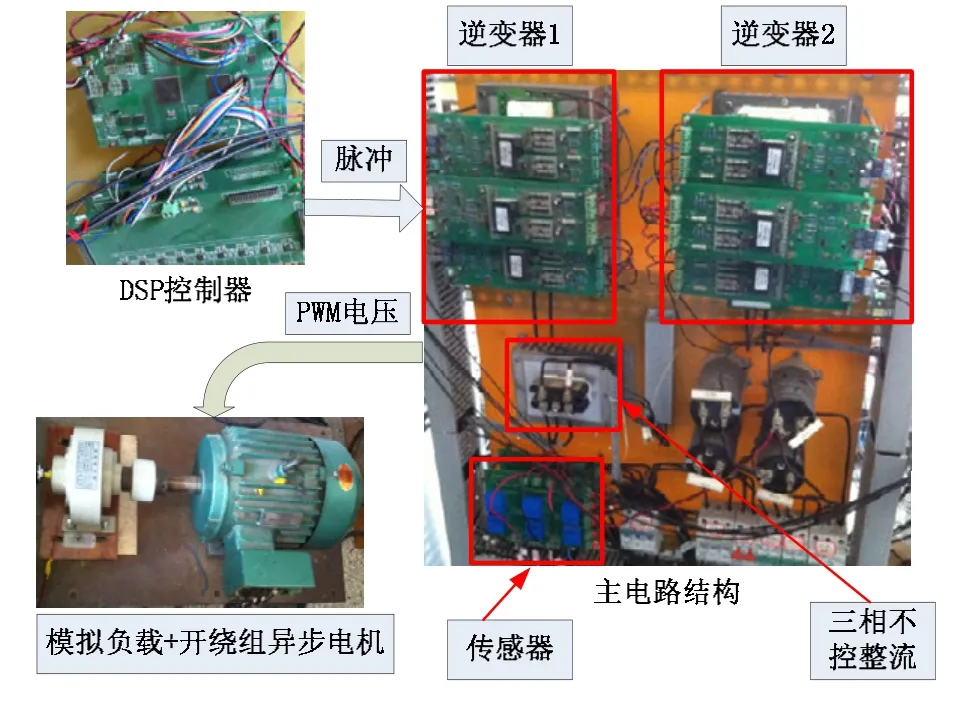
图4 实验平台

图5 算法流程图
图 6所示仿真结果为异步电机以额定转速运行时获得,负载转矩设置为零,所以异步电机为空载运行。图6(a)所示为异步电机a相绕组上电压波形,易知,该相电压电平数为3,由理论推导易得,终端级联式三电平逆变器输出相电压有Vdc/2、0和-Vdc/2这几个数值,实验波形与之吻合。图6(b)为a相电流波形,可以发现电流波形正弦度较好,谐波含量较少,可以保证电机正常运行;图6(c)为a相电流的频谱分析图,从图中可以看出,零序分量(3次谐波含量)较低,说明系统中零序环流得到了较好的抑制。图6(d)为逆变器1的端电压(vA1O)波形,可以发现,在每个基波周期内(0.02s),端电压大小有一半的时间是保持不变的,说明在该半个基波周期内开关器件S11和S14没有开通与关断的动作,因此有效降低了器件的实际开关频率,从而减少了相应的开关损耗。对于其他开关器件,同理可得相同结论。图 7为相应的实验结果,易得实验结果与仿真结果基本一致,从而进一步验证了文中算法的正确性与有效性。
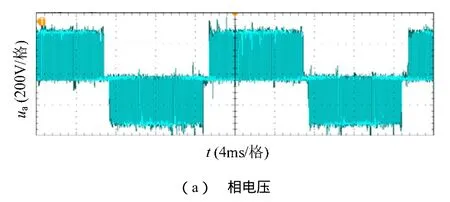

图7 实验结果
5 结论
针对终端级联式三电平逆变器所具有的特点,采用了一种降低开关频率兼顾平均消除零序电压的调制方法,结论如下:
(1)该调制算法无需查表和复杂的扇区判断等步骤,利用三相瞬时相电压直接获得各开关器件的开关时刻,能够有效减少程序运行时间,节省硬件资源。整个调制区域内始终有一台逆变器处于钳位状态,因此所有开关器件的实际开关频率降低了一半,从而有效降低了开关损耗。
(2)对于采用共母线结构的终端级联式三电平逆变器进行 PWM 调制时,系统中出现的零序电压会产生很大的零序环流,影响电机正常运行。文中采用的方法对零序电压进行抑制后,虽然保证了电机的正常运行,但是直流电压利用率有所降低,这是今后需要进一步研究的问题。
[1]Nabae A, Takahashi I, and Akagi H. A new neutral-point-clamped PWM inverter[J]. IEEE Transaction on Industry Applications, 1981, 17(5):518-523.
[2]Lai J S, Peng F Z. Multilevel converters-a new breed of power converters[J]. IEEE Transactions on Industry Applications, 1996, 32(3): 509-517.
[3]Nikola C, Dushan B. A Fast Space-Vector Modulation Algorithm for Multilevel Three-Phase Converters[J]. IEEE Transactions on Industry Applications, 2001, 37(2): 637-641.
[4]姜卫东, 王群京, 陈权, 等. 一种新的N电平电压源逆变器的空间矢量调制算法[J]. 中国电机工程学报, 2008, 28(33): 12-18.
[5]Stemmler H and Guggenbach P. Configurations of high-power voltage source inverter drives[C]. EPE Conference, 1993, 5: 7–14
[6]Mohapatra K K, Gopakumar K, Somasekhar V T, et al. A harmonic elimination and suppression scheme for an open-end winding induction motor drive[J].IEEE Transactions on Industrial Electronics, 2003,50(6): 1187-1198.
[7]Sekhar K R and Srinivas S. Discontinuous Decoupled PWMs for reduced current ripple in a dual two-level inverter fed open-end winding induction motor drive[J]. IEEE Transactions on Power Electronics. 2013, 28(5): 2493-2502.
[8]Somasekhar V T, Srinivas S, and Gopakumar K. A space vector based PWM switching scheme for the reduction of common-mode voltages for a dual inverter fed open-end winding induction motor drive[C]. Conf. Proc. IEEE-PESC, 2005, 816-821.
[9]Somasekhar V T, Srinivas S, and Kumar K K. Effect of zero-vector placement in a dual-inverter fed open-end winding induction-motor drive with a decoupled space-vector PWM strategy[J]. IEEE Transactions on Industrial Electronics, 2008, 55(6):2497-2505.
[10]Baiju M R, Mohapatra K K, Kanchan R S, et al. A dual two-level inverter scheme with common mode voltage elimination for an induction motor drive[J].IEEE Transactions on Power Electronics, 2004,19(3): 794-805.
[11]Oleschuk V, Bose B K, and Stankovic A M.Phase-shift-based synchronous modulation of dual-inverters for an open-end winding induction motor drive with elimination of zero sequence currents[C]. Conf. Proc. IEEE-PEDS, 2005,325-330.
[12]Jae Hyeong Seo, Chang Ho Choi, and Dong-Seok Hyun. A new simplified space-vector PWM method for three-level inverters[J]. IEEE Transactions on Power Electronics, 2001, 16(4): 545-550.
[13]Chung D-W, Kim J-S, and Sul S-K. Unified voltage modulation technique for real-time three-phase power conversion[J]. IEEE Transactions on Industry Applications, 1998, 34(2): 374-380.
[14]Somasekhar V T, Srinivas S and Kumar K K. Effect of zero-vector placement in a dual-inverter fed open-end winding induction motor drive with alternate sub-hexagonal center PWM switching scheme [J].IEEE Transactions on Power Electronics,2008, 23(3): 1584-1591.
