导轨式机器人桁架的强度设计
2015-01-21李江曾宪杰曾宪任
李江 曾宪杰 曾宪任
摘要:本文针对漆包线生产线的实际工程问题,设计导轨式机器人桁架结构,采用有限元分析方法对桁架衡梁强度进行校核,完善了桁架强度设计。对初始衡梁设计进行修正,在衡梁中间文章增加一短、小型号矩形钢,增强了结构的强度,提高了结构的刚度,使得新桁架结构在中间位置的最大扰度为0.4mm,符合设计要求标准(小于0.5mm),保证伸缩臂在衡梁上滑行顺畅。
关键词:衡梁 有限元 强度设计
1 概述
某公司漆包线生产的收线位置目前采用人工收线,生产效率低下。漆包线盘规格多种多样,最重规格200公斤/个。为了提高生产效率,特设计一导轨式机器人,取代人工收线工艺,实现自动更换线盘作业。对导轨式机器人的机械结构件中,最主要的是机器人的桁架强度,桁架强度设计集中体现在桁架的衡梁强度设计。
2 机器人桁架衡梁的设计
根据漆包线作业现场,设计机器人的作业范围,衡梁跨度7m左右。整体初步设计如图1所示。衡梁采用空心矩形钢型材截面尺寸为200×300×10(mm),总長7.36m。结构材料选用结构钢Q345B,强度较高,以保障结构强度。Q345B与Q235A价格相差不大,强度上要高很多,焊接性能也适当。
图1 导轨式机器人初步设计结构
3 衡梁强度校核与修正
衡梁设计好后,需要对衡梁机械结构强度和刚度进行校核。从图1中可以看出,上升臂安装在衡量上,并通过直线导轨导向运动。因此衡梁刚度要求较高,否则直线导轨上滑块运动困难,要求衡梁上最大扰度小于0.5mm,可确保导轨滑块滑行顺畅。
本文采用有限元分析方法对衡梁建模并进行有限元分析,得到衡梁上各节点的位移分布及应力分布。实际设计2跟衡梁并行安置,考虑到运动过程的偏载,对1根衡梁加全载分析,提高结构的安全性。首先对衡梁进行三维建模,图2为衡梁的三维模型。
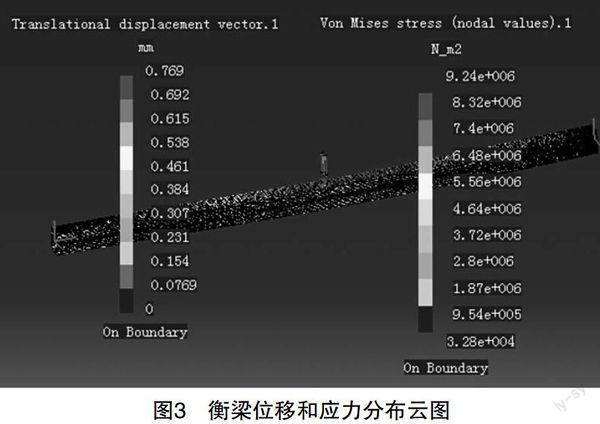
建立衡梁的三维模型后,对衡梁进行网格划分,施加约束及载荷后,进行有限元计算。由于漆包线盘负载约180kg,上升臂约为320kg,得到总负载为500kg。对衡梁模型两端施加约束,中间位置施加总负载,得到衡梁的位移分布及应力分布云图,如图3所示。
图3 衡梁位移和应力分布云图
从图中的应力云图可以看出,衡梁的最大应力为9.24MPa,远小于材料的屈服强度345MPa,衡梁的强度可靠。但衡梁受载后的最大位移为0.769mm,发生在衡量的中间位置,超出了预计的设计要求0.5mm。因此,衡梁结构的刚度欠佳,需要提高衡梁的刚度,减少变形,确保导轨滑块运行顺畅。
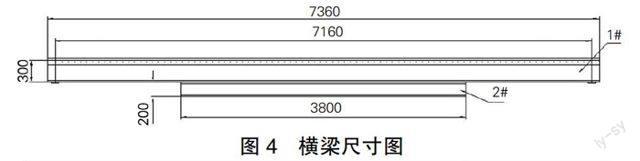
由于最大位移出现在中间位置,因此在衡量中间位置下方增焊一短衡梁,以提高结构的刚度。并对横梁建立有限元模型,再次进行强度计算和校核。图4为修正横梁的几何尺寸图。
图4 横梁尺寸图
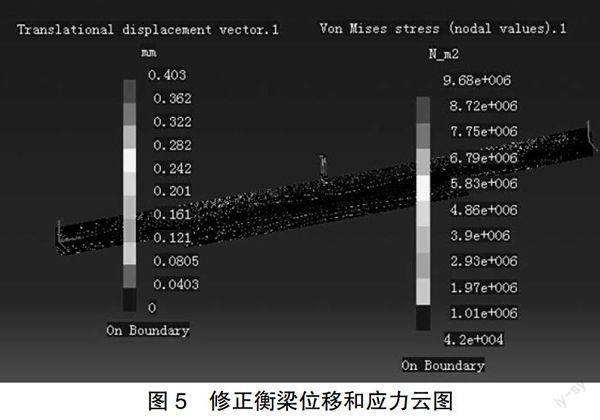
横梁采用两矩形钢焊接而成,1#矩形钢为300*200*10(mm),2#矩形钢为200*150*8(mm)。由于跨度较大,为了减少1#型钢的变形,特在1#型钢中间下方添加2#型钢。材料均为Q345。同样通过加载中间位置,两端设置支撑点,进行了有限元计算。图5为修正后衡梁在同样载荷下的位移和应力云图。从图中可以看出:中间位置最大位移0.4mm<0.5mm,确保直线导轨正常滑行。结构最大应力为9.68MPa,满足材料强度要求。
4 结论
本文对漆包线生产的一工程实际问题,进行了分析研究。为了提高漆包线生产效率,根据生产现场实际设计一导轨式机器人,并对机器人的核心机构件,即桁架衡梁进行了有限元建模和强度计算,对初始设计方案进行了修正。同时对修正后的衡梁进行校核,结果表明强度和刚度可靠,满足设计要求。
参考文献:
[1]陈树勋,杨照刚,汤勇等.后装式压缩垃圾车结构有限元分析[J].机械设计,2007(03).
[2]沈振辉,杨拴强.自动化挖掘机动臂结构有限元分析策略研究[J].价值工程,2013(30).
[3]王林,方欣.结构有限元分析实用方法及技巧[J].建筑技术开发,2008(11).
[4]张元坤,李盛勇.刚度理论在结构设计中的作用和体现[J].建筑结构,2003(02).
[5]姜桥,夏利娟,刘晓鹏等.集装箱船货舱区结构设计和强度评估研究[J].海洋工程,2009(03).
作者简介:
李江(1958-),男,江苏淮安人,总经理,工程师,研究方向:精密机械关键技术及制造企业综合管理研究。
