《控制工程基础》课程教学方法的改革
2015-01-21林卿
林 卿
(宿迁学院 机电系,江苏 宿迁 223800)
0 引言
控制工程基础是机械电子工程专业本科生阶段重要的基础课,专业课。由于课程内容较为抽象,且需要一定的数学基础,使得学生对于知识点的理解,记忆较为困难。为了解决这一难题,提出了几点思路。一是利用表格总结归纳,帮助学生记忆;二是利用Matlab,使教学内容更直观;三是充实实验教学内容,把抽象的知识内容直观展示出来,让学生通过动手实践去更好地理解知识点。
1 利用表格总结归纳,帮助学生记忆
教材中[1]对于不同类型反馈控制系统的稳态误差系数分别为:
对于0 型反馈控制系统,可以计算出三种稳态误差系数Kp、Kv和Ka分别为:对于Ⅰ型反馈控制系统,可以计算出上述三种稳态误差系数Kp、Kv和Ka分别为对于Ⅱ型反馈控制系统,可以计算出上述三种稳态误差系数Kp、Kv和Ka分别为:(s)H(s)=∞,单独记忆难度较大,容易混淆,现在整理成表格。

表1 不同系统型别的稳态误差系数Tab.1 The steady-state error coefficients of different systems
从表格中可以看出,在表的对角线上,稳态误差系数为K0,K1,K2;在对角线以上部分,稳态误差系数为0;在对角线以下部分,稳态误差系数为无穷大。经过整理,使得稳态误差系数在不同系统型别情况下便于记忆。
2 利用Matlab,使教学内容更直观
在控制系统PID 校正内容的讲授中,利用Matlab 仿真,使知识点更容易理解。以小车-弹簧-阻尼系统为例。其传递函数,参数M=1,b=10,k=20,F(s)=1。试设计不同的P、PD、PI、PID 校正装置,使输出响应曲线满足: 较短的上升时间和调节时间;较小的超调量;稳态误差为零。设求得的校正装置为: P校正: Kp=300;PD 校正: Kp=300,Kd=10;PI 校正: Kp=30,Ki=70;PID 校正: Kp=350,Ki=300,Kd=50。
2.1 求解未加入校正装置的原开环控制系统的阶跃响应
根据系统的开环传递函数,在Matlab Editer/Debugger 下[2]编辑下述代码:
Clear; num=1; den= [1 10 20] ; step (num,den)
得到系统的开环阶跃响应。
2.2 P 校正装置设计
输入代码:
Kp=300;
num=[Kp];
%特征方程
den=[1 10 20+Kp];
t=0:0.01:2;
%系统的阶跃响应
step (num,den,t)
得到加入P 校正后系统的闭环阶跃响应如图1 所示。

图1 P 校正后系统闭环阶跃响应Fig.1 The closed-loop step response after P control
2.3 PD 校正装置的设计
代码如下:
Kp=300;
Kd=10;
%校正装置
%特征方程
den=[1 10+Kd20+Kp];
t=0:0.01:2;
step (num,den,t)
得到加入PD 校正后的系统闭环阶跃响应如图2 所示。
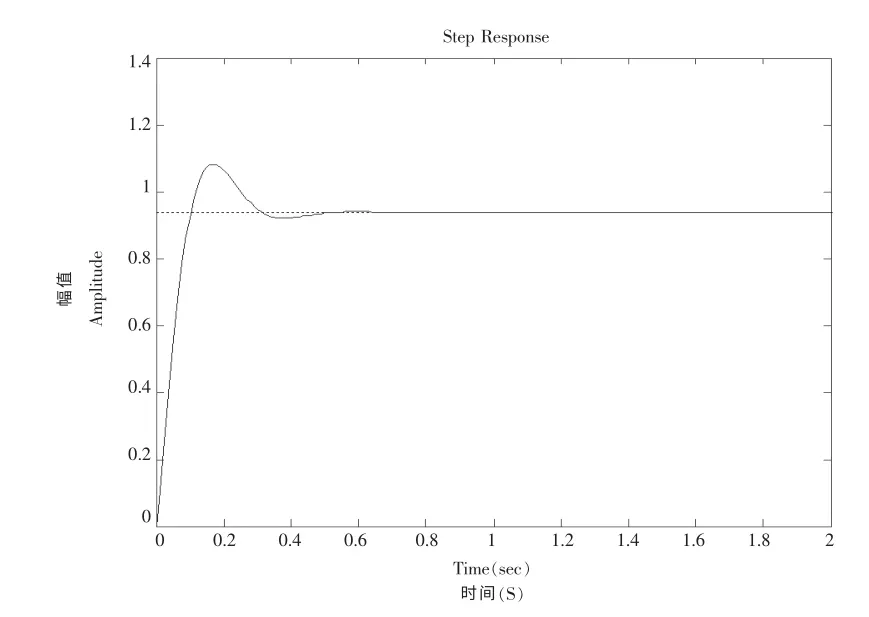
图2 PD 校正后系统闭环阶跃响应Fig.2 The closed-loop step response after PD control
2.4 PI 校正装置设计
输入代码:
Kp=30;
(2) 设置4个处理:0(CK)、100 μmol/ L 褪黑素(MT)、280 μmol/L硝基苯酚(NP)、280 μmol/ L 硝基苯酚 + 100 μmol/L褪黑素(NP + MT)。不同实验组各处理6株水稻幼苗,分别处理5 d后测定水稻幼苗生理指标。褪黑素浓度基于预实验确定,处理前用无水乙醇助溶MT或NP(对照组加等量无水乙醇),然后加蒸馏水配制成实验所需浓度。
Ki=70;
num= [KpKi];
den= [1 10 20+KpKi];
%绘制阶跃响应曲线
t=0:0.01:2;
step (num,den,t)
得到加入PI 校正后的系统闭环阶跃响应如图3 所示。
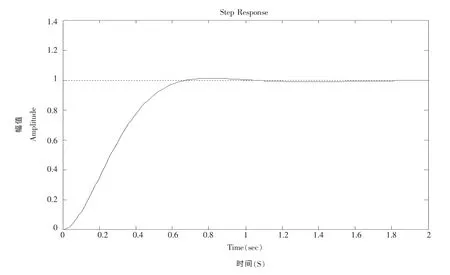
图3 PI 校正后系统闭环阶跃响应Fig.3 The closed-loop step response after PI control
2.5 PID 校正装置的设计
输入代码:
Kp=350;
Ki=300;
Kd=50;
%PID 校正装置
num= [KdKpKi] ;
den= [1 10+Kd20+KpKi] ;
%绘制阶跃响应曲线
t=0:0.01:2;
step (num,den,t)
得到加入PID 校正后的系统闭环阶跃响应如图4 所示。

图4 PID 校正后系统闭环阶跃响应Fig.4 The closed-loop step response after PID control
3 实验教学安排
共开设以下几项实验: 典型环节性能的模拟,典型系统性能的模拟,自动控制系统的稳定性和稳态误差分析,系统频率特性的测试。
通过实验,可以让学生了解自动控制原理实验系统的功能,掌握其操作使用方法;熟悉并定性地验证各种典型环节的阶跃响应曲线;了解参数变化对典型环节动态特性的影响。通过研究一阶系统,二阶系统的运动规律,了解改变系统的结构和参数时,系统在阶跃信号作用下的过渡过程的变化;研究放大系数对闭环系统过渡过程的影响;研究增加零点对闭环二阶系统过渡过程的影响。研究三阶系统的稳定性,验证稳定判据的正确性;了解系统增益变化对系统稳定性的影响;观察系统的结构和稳态误差之间的关系。通过对系统频率特性的测量,验证频率法分析系统的正确性;根据实验数据学会绘制伯德图和乃氏图,并和理论数据进行比较;学习测量系统或环节频率特性的方法。
[1] 王积伟,吴振顺.控制工程基础[M].北京:高等教育出版社,2010.
[2] 张德丰.MATLAB 控制系统设计与仿真[M].北京:电子工业出版社,2009.
