基于同步举升控制的汽车防水淹救助系统设计初探
2015-01-21李营
李 营
(广州铁路职业技术学院,广东 广州 510430)
0 引言
近年来,强降雨过后造成水淹汽车现象日益增多,为广大车主和保险行业带来了巨大的经济损失。而在众多水淹汽车中,有相当比例的汽车在完全浸水前已预测到水淹危险,却无法对汽车实施及时、有效的救助。目前,国内外关于水淹汽车救助的相关研究和报道都十分少见,市场上更没有成型的防水淹救助系统可以有效防止水淹车的发生。目前,国内外关于防水淹汽车救助的相关研究和报道都十分少见,市场上更没有成型的防水淹救助系统可以有效防止水淹车的发生。因此,能否开发出有效的汽车防水淹自救系统并推向市场,可对抵御自然灾害做出积极贡献[1,2]。
1 汽车防水淹救助的研究现状
国外关于汽车防水淹救助的研究较少,虽然美国、澳大利亚等国家每年都会有水淹车灾害发生,但相对应的研究多集中在水淹后的应对措施、维修等方面,但对于防水淹救助处理等方面的研究并不多见。国内关于汽车防水淹救助方面的研究同样少见,王文军等在《汽车涉水行驶及其施救方法》 一文探讨了汽车已进水后的处理与自救程序;刘勇在《驾驶园》杂志介绍了一种汽车排气管防水装置,通过加入弯管提高排气管道出口高度,一定程度上提高了汽车安全涉水深度,但不能有效避免水淹车问题[3]。
现实生活中,大多数车主在汽车逐渐浸入水中的过程中无奈的选择了放弃救助,也有部分人采取了相应自救措施,主要包括以下几种: ①迅速驶离积水位置,此措施仅对具备驶离条件的车辆可行;②雨前把车开到高位,此措施仅对有地理条件且汽车尚未深度浸水时可用;③将车添加防水设计,仅能一定程度起到防水作用,在汽车深度浸水时失效;④将车原地提高,部分车主雨前通过千斤顶把车四个轮子逐一抬起并垫入加高块,起到很好的防水淹效果,但如果没有专用的举升装置,其操作较为复杂,增加高度有限,且在紧急抢况下很难迅速实施。
2 汽车举升结构的主要类型
国外20 世纪初期因汽车维修业的发展逐渐产生了汽车举升机,随着科技发展,举升机类型也逐渐拓展,目前常用的举升机包括机械式、液压式和气压式三种类型[4],三种举升结构的性能比较如表1 所示。其中机械传动举升机多用于工厂及工业设备的举升装置,气压传动举升机一般常见于自动化生产线中负载较小且需要快捷动作的场合,液压传动举升机由于其性能优势成为目前主流的汽车举升机产品类型[5]。
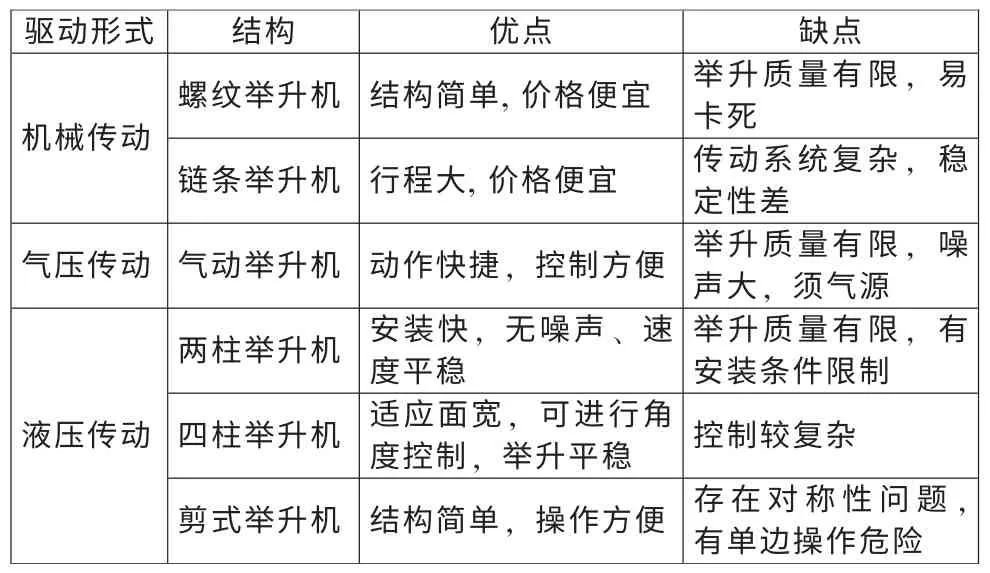
表1 举升机构的性能比较表Tab.1 Properties comparison of auto lifting mechanism
一般的汽车举升机主要针对于汽车维修中使用,需安装,体积大,重量大,难以在防水淹救助系统中推广。随着近年来汽车工业的高速发展,对汽车举升技术的研究逐渐从举升机构的创新拓展到结构优化设计、举升控制技术研究、举升运动学分析、举升稳定性研究等方面,同步控制技术也在举升控制领域得到了广泛应用,该技术早期多用于建筑领域,我国50年代才开始应用于桥梁的施工,如西南交通大学于惠楠对整体同步顶升梁板更换桥梁支座提出了解决方案等[6,7],但同步举升技术尚未在汽车举升领域得到广泛应用。
3 基于同步举升控制技术的汽车防水淹系统设计
本文借助汽车原地升高思路提出一种举升 (顶升)式汽车防水淹自救系统,可通过举升结构优化设计,确保支撑的稳定性和便携性;通过选择位移、倾角及压力三个传感器对车身提升过程的稳定性进行实时监测,并采用智能控制的方法,对系统进行优化设计校正,使其满足稳定性要求。自救系统包含水淹预警监测子系统、举升控制子系统、举升动力子系统、举升执行机构、防水装置等部分,系统框图如图1 所示。
(1)举升与支撑系统结构设计。考虑到便携式和承重,按照普通小型汽车设计举升的最大重量为2500kg,举升的高度为800mm;考虑可利用汽车自身电源等原因,设计总电控功率控制最小可达150W 以内。鉴于汽车水淹现场可能是地形不够规则的路面和停车场,需选取可进行举升角度控制的多点同步举升方法,通过配合自适应控制系统来实现举升后的车体的水平问题,因此选取分体式四柱举升作为汽车防水淹的举升机构,并从便携性和稳定性进行举升结构优化设计。
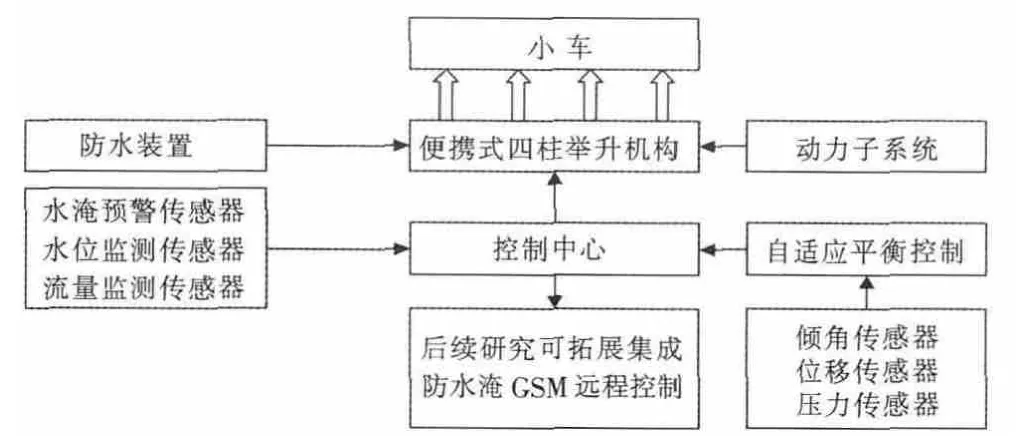
图1 汽车防水淹救助系统框图Fig.1 The block diagram of waterproof relief system of automobile
(2)举升控制子系统设计。为了实现较高的控制精度,选择闭环的控制方式实现四柱同步举升,时刻保持车体水平度在一定范围以内。基于模糊控制响应速度快、减弱超调、防止振荡等优点,本设计采用基于模糊自适应控制技术,选取三个参数建立三维模糊控制器,并选取恰当的控制步长以实现车身的平稳举升。在调平系统中,选用最高不动的 “追逐式” 调平方法。选择的控制参数如下:①位移:根据控制液压缸的位移实现同步举升动作。因位移控制技术及传感器发展较为成熟,同步控制较易实现,并具有系统简单,可靠性高等特点,可作为系统的主要控制参数;②倾角:为了车身稳定要求,需要在举升过程对车体倾角进行控制。通过倾角传感器,实现倾角调节控制,保证车体的重心在合理范围,也可以有效避免因地面不平或变形造成的车身倾斜隐患;③压力:四点同步举升控制往往会造成其中一个支腿“悬空”,从而产生了“虚腿”问题[8],系统通过压力传感器检测四个支撑点压力,并通过位移控制器微调“虚腿”高度。
(3)动力子系统设计。为拓宽防水淹系统的应用范围,其动力子系统设计两套方案。方案一:利用220V 交流电源供电。本方法动力子系统设计简单,供电能力能得到保障,但是仅能在具有供电条件的停车场和私家车库适用;方案二:采用汽车自供电。汽车电瓶通常供电电压为12V(24V,36V)直流电源,可提供150W 左右的功率,此方式解决了系统供电的场地限制,但仅可实现低功耗的举升控制。
(4)预警与防水子系统设计。预警系统是为了给车主提供举升控制的提示、警示和使能控制,包含以下功能: 危险水位(水淹车)的测量与预警;水流强度检测与预警(举升危险性);举升条件的自动检测与举升使能控制;举升场地的障碍警示及举升的紧急止动控制等。因系统可能会在水下工作,工作环境要求系统防水性,设计中把举升机械结构和电控系统加入了防水设计。
4 系统改进设想与应用展望
(1)提高支撑结构的便携性与稳定性。结构设计需考虑四柱的安装位置、固定方式、支架结构等,提高机构稳定性,同时也要考虑减小系统质量及控制成本等。今后研究中既要针对不同的应用场合,从经济性和适用性出发设计恰当的支撑结构,又可以借助有限元分析和实验测试法,不断优化支撑结构,解决轻便与稳定之间的矛盾[9]。
(2)提高举升控制的稳定性。一是避免“虚腿”问题,因四点支撑易产生 “虚腿”,可在今后的优化设计中采用四柱独立式举升机,借助压力传感器,通过软件设计解决虚腿问题;二是避免车身倾斜,可借助倾角传感器,建立模糊控制器对倾角作矫正控制,时刻保持车体底面对水平面平衡度的要求;三是考虑水流对控制的影响,汽车水淹环境恶劣,水流强度如果太大,容易造成举升的汽车倾覆,因此须对水流量进行监测,通过流体力学分析,构建车身倾角矫正控制,在水量较大时尽量减小举升高度来换取系统稳定,同时调整车身倾角,增加顶升系统与车身的作用力,提高车体稳定性。
(3)系统的动力供应问题。考虑到防水淹自救实施地点的普适性,系统最好可以利用汽车电瓶供电,但电瓶通常供电为低压直流供电,输出功率有限,实现四缸同步驱动有一定困难。因此系统设计中考虑双动力输入控制方案: 在利用交流220V 供电时动力较充足,选择四柱同步驱动控制;利用汽车自身电源时,动力较弱,要对动力系统进行低能耗优化,或切换到单柱循环轮流举升控制。
(4)设计应用展望。本文提出了基于同步举升技术的汽车防水淹自救系统解决方案,并对系统的结构、控制方式、防护措施等给出了设计思路和方法,但系统的稳定性、自身的重量、便携性、应用范围等还需在进一步的试验中加以验证。如能通过持续改进,建立轻便可靠、价格合理的汽车防水淹自救产品,并逐步拓展更多的实用功能,必将能够得到广泛的应用和推广。
[1] 李媛. 关于广州市“水淹车库”的分析[J].中国公共安全(学术版),2011,4.
[2] 陆善辉.由广州水浸车库事件谈地下停车库的日常管理[J].中国物业管理,2010,9.
[3] Jabatan Pengairan. Guideline on Flood Prevention for Basement Car Parks[EB/OL]:http://jps.penang.gov.my/weblinkattach/guideline%20on%20flood%20prevention%20for%20basement%20car%20parks.pdf
[4] 郭武,黄泽星,吴上生. 汽车举升机的发展趋势分析[J]. 2011,21.
[5] 赵佳.举升机/进化史汽保行业面面观之汽车举升机篇[J].检测技术及设备,2010,9.
[6] 黄川贵.人行天桥同步顶升系统研究[D].西南交通大学硕士学位论文,2009.
[7] 于惠楠.整体同步顶升梁板更换桥梁支座的应用研究[D].吉林大学硕士学位论文,2007,1.
[8] 姚晓璐.基于多体动力学的自卸半挂汽车举升稳定性研究[D].武汉理工大学硕士学位论文,2008,4.
[9] 张兴旺.基于ADAMS 的举升装置的控制系统设计及仿真[J].专用汽丰,2006,9.
