一种基于RSSI的三角形质心改进算法
2015-01-17徐保国
于 泉,徐保国
(江南大学 物联网工程学院,江苏 无锡 214122)
无线传感器网络节点定位研究受到国内外学者的广泛关注,根据定位时是否需要测量距离,定位算法可分为基于测距(Range—Based)算法和无需测距(Range—free)算法[1]。 基于测距的定位算法利用测量的距离或角度信息等进行定位运算,常用的测距技术主要有 RSSI[2]、TOA、TDOA、AOA[3],无需测距通常根据网络连通性进行定位,无需测距的算法主要有质心算法、DV-Hop算法、APIT算法、MDS算法。基于测距的定位算法需要附加的设备,提高了设备成本和通信开销大,无需测距算法由于对设备要求低,计算简单和通信开销小等优点,成为无线传感器网络定位研究的热点。无需测距定位的算法因在成本、功耗等方面的优势,受到越来越多的关注。
1 传统定位算法模型
1.1 传统质心算法
南加州大学的Nirupama Bulusu等人[4]提出一种基于网络连通性无需测距的质心定位算法,主要思路举例体现,假设未知节点F在A1…An为锚节点组成的多边形中,锚节点坐标分别为(x1,y1)~(yn,yn),则未知节点 F 坐标为:
传统质心算法的计算量和通信开销较少,原理简单容易实现,受到广泛研究,但其对传感器节点密度和均匀度依赖强,质心算法受这两个因素影响较大,当锚节点接受的信息方差较大时,定位精度会变得比较低,定位精度有待提升,文献[5]提出了基于RSSI的三角形质心算法,三角形面积减小,定位精度得到一定提升;文献[6]利用三角形三边的垂直平分线,划分6个区域,通过比较三锚节点接收的信号强度,确定未知节点所在的区域;上述算法都是通过缩小未知节点所在三角形的面积,提高定位的精度,本文思路大致相同,通过连接三边中点划分16或10个区域,利用外心的适应度值大小确定未知节点所在区域,同样提升了定位精度。
1.2 RSSI测距技术
RSSI的测距,接收节点根据收到信号强度,计算信号传输损耗,利用信号的经验模型或理论模型将传输损耗转化为距离[7]。信号的经验模型是匹配建立在各个点上的位置与信号强度的数据库,理论模型通常采用的是无线电传播损耗模型,常用的传播路径损耗模型有:对数-常态分布模型和自由空间无线电传播路径损耗模型,采用对数-常态分布模型[8],即

其中,PL(d)为信号传输距离 d 的路径损耗,PL(do)为信号传输距离do的路径损耗,n为信号衰减参数,通常取2~5,Xσ为期望为0标准差为σ的高斯分布。未知节点接收到锚节点信号强度为:

2 改进的三角形质心算法
如图1所示未知节点D在三个锚节点组成的锐角三角形内,A1、A2、A3分别为 AB、AC、BC 的中点, 则 4 个小三角形两两全等,外接圆的半径也相同,假设点D是两平行线A1A2、A4A5之间的任意一点,作DE垂直 A1A2,则∠P1DE为钝角,连接 P1E、P2E,点 O 为 A1A2的中点,连接 P1O、P2O,P1、P2分别为三角形A A1A2和三角形A1A2A3的外心,圆心到弦中点的直线垂直平分弦,即P1O、P2O垂直平分A1A2,所以,P1E=P2E,因为∠P1DE为钝角,所以P1E>P1D,所以P1E>P1D,即点D到三角形A A1A2的外心比到三角形A1A2A3的外心距离要小,三角形内的其他点,即三角形A A3A4内的点,到P1的距离明显比到P2的距离小,得出三角形A A1A2内的点到外心的距离中,到P1的距离最小。其它相邻三角形的判断与上述同理,判断未知节点在锚节点组成的三角形内后,连接三边中点,计算小三角形的外心,然后比较未知节点到四个外心的距离,得到距离最近的外心,它所在的小三角形就是未知节点所在区域,继续按此原理划分区域,最终把三角形划分了16个区域,通过判断未知节点到哪一外心距离最小,来判断其所在的小三角形,但是未知节点坐标未知,无法计算其到外心的距离,受到定位算法中适应度值[9]计算的启发,距离未知节点越近,适应度越小,确定未知节点所在小三角形后,得到小三角形质心,质心为未知节点估计坐标。
适应度值计算公式为:

式中:(xj,yj)为小三角形的外心坐标,(xi,yi)为 i锚节点坐标,di为未知节点到i锚节点的距离,n为锚节点数量。
所有患者均给予常规对症治疗,吸氧、服用阿司匹林、阿托伐他汀,控制血压、血糖,根据颅内压情况酌情给予甘露醇脱水治疗,并给予改善微循环、抗感染维持水、电解质平衡等治疗。在此基础上,对照组给予依达拉奉注射液(吉林省辉南长龙生化药业股份有限公司,国药准字H20080592)30 mg加入生理盐水100 m L中静脉滴注,2次/d。观察组在对照组基础上服用丁苯酞软胶囊(石药集团恩必普药业有限公司,国药准字H20050299)0.2 g/次,3次/d。14 d为1个疗程,1个疗程后评价疗效[3]。
未知节点在三锚节点组成的直角三角形时,连接三边中点,其中两个小三角形的外心重合,先判断这3个外心适应度值最小者。如果重合的外心适应度值最小,把所在的区域缩小为矩形区域,再把矩形区域平分成4个小矩形,求出其外心坐标及其适应度值,得到适应度值最小的外心,相应的小矩形的质心为估计位置。如果另外两个小三角形外心适应度值最小,连接三边中点,重合外心的两个小三角形作为一个区域参与判断,最终直角三角形被分成10个三角形或矩形,如图2所示,P1~P10为10个三角形或矩形的外心,若顶点A、B、C坐标后计算P1~P10的适应度值,判断未知节点在哪一小三角形后,求出三角形的质心,质心则为未知节点的估计坐标。
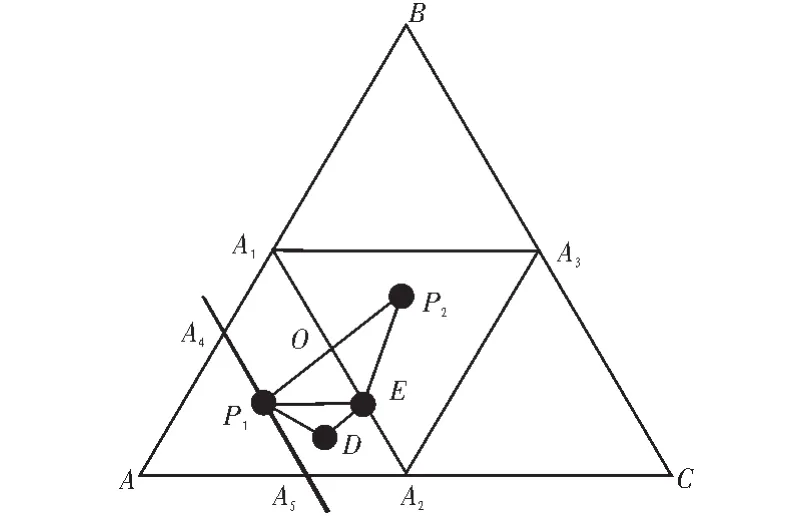
图1 未知节点在锐角三角形中Fig.1 The unknown node in acute triangle
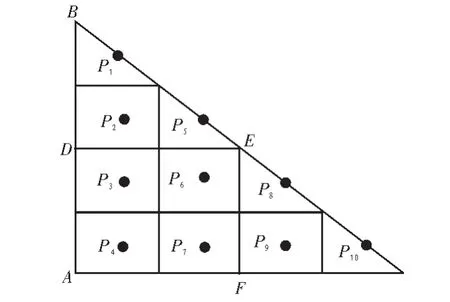
图2 未知节点在直角三角形中Fig.2 The unknown node in right triangle
未知节点在3个锚节点组成的钝角三角形中时,与锐角三角形情况不同的是,两个小三角形的外心在相邻的三角形中,如图3所示,D、E分别为三角形P1P2P3、P1B P3的外心,未知节点F在三角形P1B P3内,距离三角形P1B2P3的外心最近,未知节点F在三角形P1P2P3内时,距离三角形P1B P3的外心最近。先判断三角形P1A P2、P2CP3、P1P2P3外心的适应度值,若判断未知节点在三角形P1P2P3内,未知节点也可能在三角形P1B P3内,再比较外心D、E的适应度值,若D适应度值小,未知节点在三角形P1BP3内,若E适应度值最小,未知节点在三角形P1P2P3内,连接三边中点,继续划分小三角形。若未知节点在三角形P1A P3或三角形P1CP3内,继续连接中点划分三角形,最终三角形被划分为16个小三角形。
在100×100 m矩形区域随机分布50个传感器节点,取其中一个作为参考点,取距离参考节点h的圆上点,从弧度0~6.2选取63个点,得到适应度值曲线,如图4所示,距离未知节点相同的适应度值是波动的,并不是恒定不变的,距离相差大的时候,距离越小适应度值越小,但是当距离相差不大时,适应度值曲线会有交点,距离大的适应度值不一定大,存在一定误差,会造成上述判断错误,降低定位精度。

图3 未知节点在钝角三角形中Fig.3 The unknown node in obtuse triangle

图4 距离不同的适应度值曲线Fig.4 Fitness value curve in different distance
以一个锐角三角形特列仿真实验,三角形面积为32 m2,在三角形内随机取100个点,验证算法是否准确,实验100次取平均,求得判断准确率为30.25%,造成误差的主要原因是距离不变时适应度值不稳定,会造成判断所在的小三角形和实际所在的小三角形不同,由于只有在距离相差少时才会造成判断错误,所以两个小三角形往往是邻居,上述的锐角三角形特例实验中,也得出了定位误差小于1 m的点达到80.63%,判断误差一定程度上提高了定位精度,说明本算法的可行性。
3 算法步骤
1)锚节点向周围环境周期性广播包含自身ID和位置坐标的信息。
2)未知节点收到锚节点广播的信息后,对同一个锚节点的RSSI值[11],取多个RSSI数据的均值,作为其接收的RSSI值;
3)未知节点接收锚节点广播的信号,并建立3个集合:锚节点集合:B_Set={b1,b2,…,bn};未知节点到锚节点距离集合:D_Set={d1,d2, …,dn}; 锚节点位置集合:P_Set={(x1,y1),(x2,y2),…(xn,yn)};
4)未知节点从集合中选择距离未知节点小于通信半径R的锚节点,然后从选取的锚节点中任意选择三个组成三角形,构成一个3角形集合,分别采用添加计数器的PIT测试[10],选出内含未知节点的三角形集合,记为:T_Set={(b1,b2,b3),(bi,bj,bk)…},若选取的锚节点数小于 3,利用传统质心算法来定位;
5)判断三角形是锐角三角形、直角三角形或钝角三角形,然后分别采用上述方法求出未知节点的坐标集{(xe1,xe1),(xe2,xe2)…(xep,xep)}。
6)取坐标集合{(xe1,xe1),(xe2,xe2)…(xep,xep)}的期望,即其中,(x,y) 是未知节点的坐标。
4 仿真结果及分析
通过Matlab R2010b进行仿真,同时仿真传统质心算法和本文优化的三角形质心算法,来验证算法的性能。评估算法性能指标为平均定位误差。
其中定位误差为:

式中:(x,y)为算法估计未知节点 i的坐标,(xi,yi)为未知节点i的真实坐标。
平均定位误差为:

式中:n为未知节点数量,R为通信半径。
节点分布越均匀、密度越大,定位精度越高,每次实验的均匀度和密度不同,这些因素会影响实验结果,因此实验100次取平均值更合理,更能体现算法的定位效果。如图5所示,传感器节点数量50,通信半径20 m,调节锚节点比列,锚节点比例越大平均定位误差越小,本文算法的平均定位误差降低了15.47%。如图6所示,锚节点比例保持40%、通信半径20 m,传感器节点越多平均定位误差越小,本文算法的平均定位误差降低了15.21%,最高降低了17.80%。如图7所示,传感器节点50,锚节点20个,调节通信半径,本文算法的平均定位误差降低了11.70%,通信半径越大,两者定位误差差距有扩大趋势。上述实验表明锚节点比例越大、传感器节点数量越多、通信半径下越大,平均定位误差越小,本文算法的定位精度提升明显。
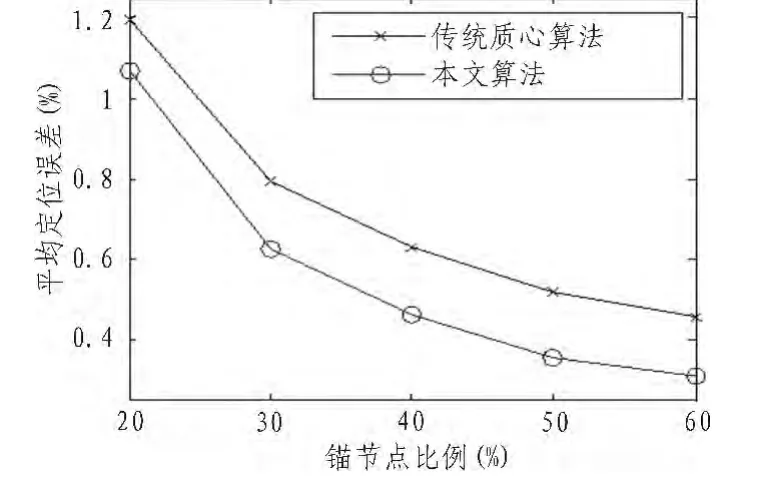
图5 锚节点比例不同时的误差Fig.5 Error of different anchor node proportion
如图8所示,在60×60 m矩形区域中随机分布50个传感器节点,锚节点25个,通信半径20 m,图示25个未知节点的误差图,传统质心算法节点误差的期望为11.479 4 m,方差为38.030 1,本文算法的节点误差期望为6.606 4 m,方差为29.007 2。可以看出,本文算法相比传统质心算法精度提升明显,稳定性也得到了一定的提高。
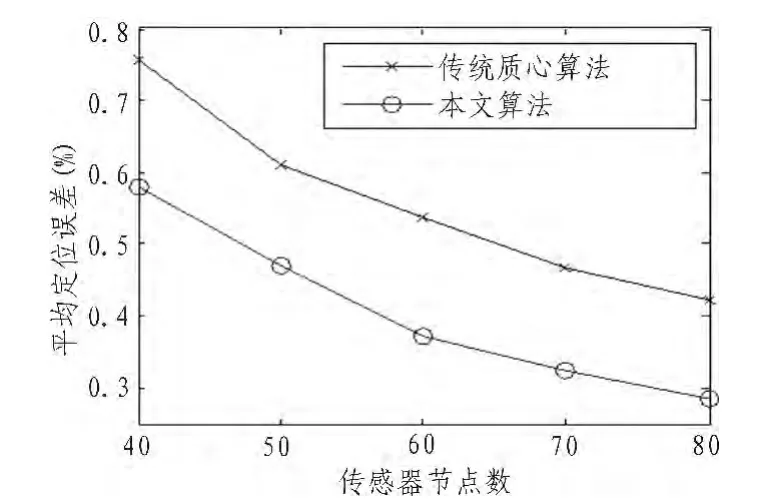
图6 节点数量不同时的误差Fig.6 Error of different number of nodes
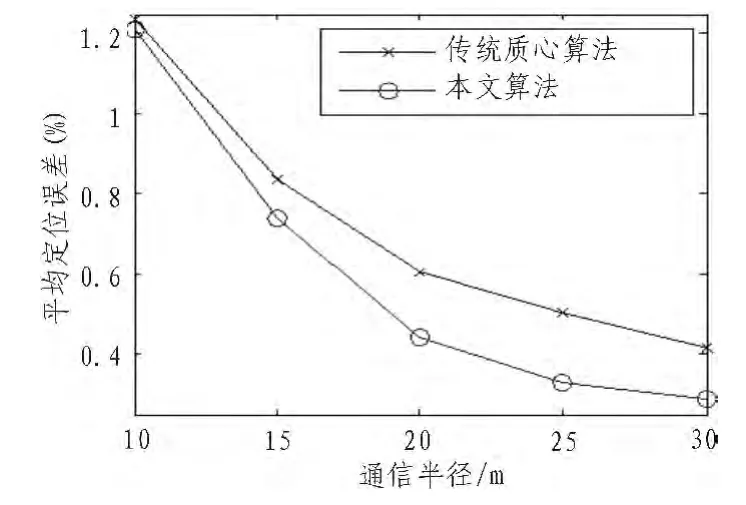
图7 通信半径不同时的误差Fig.7 Error of different communication radius

图8 节点误差图Fig.8 Node error figure
5 结 论
传统质心算法计算简单、通信开销少,但对网络环境依赖程度较高,定位精度也有待提升,本文算法把内含未知节点的三角形划分16或10个区域,利用外心适应度值的大小,来确定未知节点所在区域,三角形面积减小,定位精度变高,通过matlab仿真得出:本文算法的定位精度提升明显,平均定位误差最高降低了17.80%,稳定性也得到一定提升。
[1]刘锋,章登义.基于RSSI的无线传感器网络质心定位算法[J].计算机科学,2012,39(6A):96-98.LI Feng,ZHANG Deng-yi. The centroid localization algorithm based on RSSI for Wireless sensor network[J].Computer Science,2012,39(6A):96-98.
[2]Lu thy K A,E Grant D,Henderson T C.Leveraging RSSI for Robotic Repair of D is connected Wireless Sensor Networks[C]//Proceedings of 2007 IEEE In tern at ion al Conference on Robotics and Automation.Rome, Italy,2007:10-14.
[3]刘姗,冷文,王安国,等.一种基于RSSI的AOA估计算法[J].传感器与微系统,2013,32(11):132-134.LIU Shan,LENG Wen,WANG An-guo,et al.An AOA estimation algorithm based on RSSI[J].Transducer and Microsystem Technologies,2013,32(11):132-134.
[4]Nirupama Bulusu,John Heidemann,Deborah Estrin.Adaptive Beacon Placement[C]//In Proceedings of the 21st International Conference on Distributed Computing Systems.Mesa:[s.n.],2001:489-498.
[5]林玮,陈传峰.基于RSSI的无线传感器网络三角形质心定位算法[J].现代电子技术,2009,289(2):180-182.LINWei,CHENChuan-feng.The triangle centroid localization algorithm based on RSSI for wireless sensor network[J].Modern Electronic Technology,2009,289(2):180-182.
[6]Yu Liu,Xiao Yi,You He.A Novel Centroid Localization for Wireless Sensor Networks [J].International Journal of Distributed Sensor Networks,2012,2012:1-8.
[7]孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005.
[8]孙懋珩,廖根健.WSNs中基于粒子群优化的节点定位算法[J].测控技术,2011,30(12):111-115.SUN Mao-hang,LIAO Gen-jian.Node localization algorithm based on particle swarm optimization In WSNs[J].Measurement and Control Technology,2011,30(12):111-115.
[9]李牧东,熊伟,梁青.基于人工蜂群改进算法的无线传感器网络定位算法[J].传感技术学报,2013,26(2):241-245.LI Mu-dong,XIONG Wei,LIANG Qing.Wireless sensor networks node localization algorithm based on improved ABC algorithm[J].Chinese Journal of Sensors and Actuators,2013,26(2):241-245.
[10]王新生,廖世奇.基于区域分割的无线传感器网络定位算法[J].计算机应用与软件,2013,30(4):231-234.WANG Xin-sheng,LIAO Shi-qi.Wireless sensor network localization algorithm based on region segmentation[J].Computer Applications and Software,2013,30(4):231-234.
[11]张铮,饶志训,黄志峰.无线传感器网络中RSSI滤波的若干处理方法[J].现代电子技术,2013(20):4-6,10.ZHANGZheng,RAOZhi-xun,HUANGZhi-feng.Someprocessing methods of RSSI filtering in wireless sensor network[J].Modern Electronics Technique,2013(20):4-6,10.
