基于第一视角飞行的仿真平台搭建
2015-01-16沈阳航空航天大学伍美香长城汽车股份有限公司杰沈阳航空航天大学张鹏飞刘丙涛张红梅
沈阳航空航天大学 伍美香长城汽车股份有限公司 朱 杰沈阳航空航天大学 张鹏飞 刘丙涛 张红梅
基于第一视角飞行的仿真平台搭建
沈阳航空航天大学 伍美香
长城汽车股份有限公司 朱 杰
沈阳航空航天大学 张鹏飞 刘丙涛 张红梅
融合了虚拟现实技术、传感技术、无人机控制技术的第一视角飞行实时性好,可解决无人机无法实时捕捉瞬时景象的问题。本文设计了第一视角仿真平台。此平台分为空中飞行平台和地面控制单元,它们通过一个双向传输的通道传输信息。采用人在回路方式,无人机飞行姿态信息和实时景象同时展现在操作者视景中,实现无人机对移动目标的实时监控。本系统成本低,图像清晰,具有较好的应用前景。
第一视角飞行;无人机控制;人在回路;飞行可视化
1 引言
无人机已经经历了越南战争、中东战争、海湾战争、阿富汗战争以及伊拉克战争的考验。无人机负担了侦查监视、目标定位、战斗评估等重要任务[1]。随后,无人机视觉技术逐渐由军用转向民用,可用于地质勘测、地理测绘、人员搜救、目标追踪、灾害监测等[2]。
针对无人机进行目标定位和跟踪的问题,研究成果有很多。文献[3]给出了一种从小型固定翼无人机获取的图像中定位地面目标的方法。该方法中,应用目标在图像中的像素位置,结合无人机位置、高度和相机姿态角,可在全局坐标上对目标进行定位。卡基梅隆大学早在1996研制的无人机2号已经具备对缓慢移动的目标进行跟踪的能力[4],但其定位精度以及跟踪性能还有待改善。美国加州大学伯克利分校提出了一种基于计算机视觉的无人机自动导航系统,该系统利用视觉信息进行地面场景的3D动态建模,再融合GPS/INS等导航信息,引导无人机按照事先规划好的航线飞行[5]。我国中科院沈阳自动化所研制的小型无人直升机,与2009年9月正式展出,它可以广泛用于监视、勘测、实验等多种用途[6]。这些成果大多偏于理论研究,研究图像识别算法,或者研究跟踪策略,尚未形成成熟可用的产品。并且这些技术方案技术难度大,成本高昂。
融合了虚拟现实技术、传感技术、无人机控制技术采用人在回路的方式。它不但能给予航模爱好者逼真的驾驶体验,充分发挥“人”在系统中处理信息,执行无人机实时控制的作用,降低了监控飞行平台的技术难度,提高了实时监控能力,有利于发挥无人机在军民用任务中的应用潜力。国内外的航模爱好者从使用的设备与技术及平台的搭建等多个方面对第一视角飞行进行了粗略的论述[7-11],但这些论述都不系统,不深入。
本文中搭建的第一视角飞行平台总体分为空中飞行平台和地面控制单元,它们通过一个双向传输的通道传输信息。应用摄像机采集信息,采用人在回路方式,无人机飞行姿态信息和实时景象同时展现在操作者视景中,由“人”处理信息,控制无人机的飞行,实现无人机对移动目标的实时监控,通过第一视角飞行平台搭建解决地面监测无法实时捕捉无人机飞行瞬态景象的问题。检测分析系统的总体性能,最终得到满意的实时图像。
2 第一视角工作原理
如图1所示,四旋翼上搭载两自由度云台,云台上装载摄像头。视频眼镜和遥控器由数据线连接,当视频眼镜输出头传信息给遥控器时,遥控器通过数据线为视频眼镜供电。
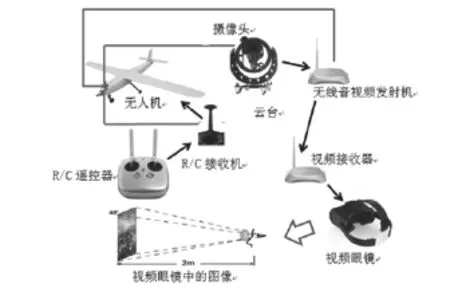
图1 平台工作原理图
摄像头所采集的音视频信息由无线音视频发射机发出,同时无人机的姿态信息通过视频叠加器(OSD)叠加到图像上,被地面装有信号接收器的视频眼镜接收后呈现人眼中,完成第一视角飞行的图像信息传输。R/C遥控器将操作者头传信息和遥控指令信息同时发送给模型飞机的R/C接收机,云台根据头转信息进行平面转动和倾斜,以此调节摄像头的姿态;同时,经过操作者的分析判断后,通过手持的R/C遥控器对四旋翼发出控制指令,搭载在四悬翼上的R/C接收机接收控制指令,并把信息传递给飞控系统(APM),改变每个电机的转速实现飞行器的俯仰偏航控制,完成人在回路的飞行控制。
3 系统实现
如图2所示,硬件设备包括视频眼镜、摄像头等。所有设备都集成在一起,通过有独立开关的控制面板供电。
(1)视频眼镜:把传输到地面的信息呈现到人眼中,产生头传指令信息。
(2)无线接收机:用于接收从无人机发出的视频信号。
(3)R/C遥控器:通过数据线与视屏眼镜相连,为视屏眼镜供电,同时为模型飞机提供地面控制指令和随动信息,完成整个系统的闭环控制。
(4)数传遥控模块:XBee模块是一种远距离低功耗的数传模块,其使用串口通信方式,每个模块都可以为路由节点,协调器,以及终端节点。
(5)视频叠加器(OSD):把无人机的状态,叠加到所传的图像上。
(6)飞控系统(APM):基于惯性导航的开源飞行控制系统。

图2 平台系统电气连接
4 直升机平台
四旋翼直升机通过四个螺旋桨产生的升力实现飞行。四个旋翼位于一个几何对称的十字支架前、后、左、右四端,如图3所示。旋翼由电机控制;整个飞行器依靠改变每个电机的转速来实现飞行姿态控制。
在图3中,前端旋翼1 和后端旋翼3 逆时针旋转,而左端旋翼2和右端的旋翼4 顺时针旋转,以平衡旋翼旋转所产生的反扭转矩。由此可知,悬停时,四只旋翼的转速应该相等,以相互抵消反扭力矩;同时等量地增大或减小四只旋翼的转速,会引起上升或下降运动;增大某一只旋翼的转速,同时等量地减小同组另一只旋翼的转速,则产生俯仰、横滚运动;增大某一组旋翼的转速,同时等量减小另一组旋翼的转速,将产生偏航运动。

图3 四旋翼飞行器旋翼旋转方向示意图
用四旋翼直升机搭载两自由度云台,云台上装载摄像头。当地面接收到控制传回的图像信息,经过操作者的分析判断后,通过手持的R/C遥控器对四旋翼发出控制指令,搭载在四悬翼上的R/C接收机接收控制指令,并把信息传递给飞控系统(APM),飞控APM发出指令改变每个电机的转速,实现直升机的俯仰、偏航控制,完成人在回路的飞行控制。
5 测试
在飞行实验中,视频眼镜呈现的图像给人身临其境的感觉,犹如自己驾驶着模型飞机。呈现在屏幕上的实时信息准确快速,与操作者控制指令信息几乎同步,实现了第一视角飞行的真实体验。如图(4)、图(5)、图(6)所示。

图4 实验测试图(0度)
图5 实验测试图(7度)

图6 实验测试图(-32度)
6 结论
经实验,本系统信号传输稳定,所传图像清晰,抗干扰能力强。系统搭建完成了地面控制与空中飞行过程的闭环控制,地面控制对无人机的姿态信息和瞬态景象信息快速掌握,并通过头传信息、遥控指令信息对摄像头、模型飞机进行指令控制,实现了人在回路的第一视角可视化飞行,改善了飞行控制系统的准确性和快速性,系统效率高,实施简单便宜,具有较好的应用前景和使用价值。
[1]董国忠,王省书,胡春生.无人机的应用及发展趋势[J].国防科技,2006,10:34-38.
[2]秦博.王蕾无人机发展综述[J].飞航导弹,2002,8:4-10.
[3]J.Redding,T.W.McLain,R.W.Beard,C.Taylor.Vision-based Target Localization from a Fixed-wing Miniature Air Vehicle[J].American Control Conferrence.2006:2862-2867.
[4]Omead.Amidi,T.Kanade,R.Miller. Vision-based Autonomous Helicopter Research at Carnrgie Mellon Robotics Institute[J].IEEE/SPIE Robust Vision for Vision-based Control of Motion,1999:221-232.
[5]Bruno.Sinopoli,Mario.Micheli.Vision Based Navigation for An Unmanned Aerial Vechile[J].IEEE/ICRA International Conference on Robotics and Automation,2003,2:1757-1764.
[6]新华网.国产ServoHeli-120型自主旋翼无人机亮相[EB].http://war.163.com/09/0909/10/51OVQ1L600011MTO.html.
[7]杨贵慈,海鸥.充满魅力的第一视角飞行[J].航空模型,2009(9): 40-43.
[8]张弓.第一视角飞行入门[J].航空模型,2010(11):31-33.
[9]一帆.简易FPV地面站的制作[J].航空模型,2011(6):39-43.
[10]张宝健.给模型飞机一双慧眼:改造第一视角飞行中的微型DV[J].航空模型,2011,12:54-58.
[11]Rolf,张弓.第一视角飞行新概念[J].航空模型,2012,01:31-33.
指导老师:张红梅。
2015年沈阳航空航天大学大学生创新创业训练计划项目(DX501303)。