潜水机器人在深孔有压式隧洞环境检测中的应用
2015-01-16王黎阳
王黎阳
(广东粤电南水发电有限责任公司,广东韶关,512000)
1 南水引水隧洞闸门井至拦污栅前隧洞工况
南水电站位于广东省乳源瑶族自治县东坪镇(原龙南镇)鸡公岐附近的南水河,属于多年调节水库。电站原先以发电为主,结合改善防洪和灌溉等综合利用,2011年调整为以防洪、供水为主,结合发电、灌溉。原设计总装机容量为75MW(3×25 MW),增容改造后最大出力可达100 MW(1×32+2×34 MW)。
此次检测电站引水隧洞的闸门井至拦污栅段,隧洞管径为4 500 mm左右,长度218 m,位于水面线下约30 m左右。由于该段仅单侧有挡水闸门,故从1971年建成至今,该段隧洞一直处于充满水的状态。
传统方法对电站水下设施进行检测,主要是通过派遣专业潜水员的方式来实现,这种方法的劣势很明显:(1)可检测环境非常局限,检测环境不能太窄,水位不能太深,常规空气潜水作业往往局限在10~20 m左右。当水深>20 m时,潜水员在水下的可操作时间大为缩短,工作效率降低;水深>40 m时,潜水员需要启用“氦氧饱和潜水”的特种潜水作业,工作效率更低、成本更高。(2)人工下水检测安全风险极高,对于很多实际可人工检测但有一定风险的,往往保守选择放弃检测。(3)潜水员检测方式比较单一,往往以拍摄记录浅水区域的一些画面为主。
此次检测的位置是闸门井至拦污栅一段的引水隧洞,其检测环境结构狭小、检测深度较深等特点决定了无法通过传统潜水员进行检测,而之前国内电站针对具有此类特点的环境,大都无法进行检测工作。由于以上原因,南水电站该段隧洞运行至今未进行过检测。
未进行检测并不意味电站的水下设施和环境状态良好,也不能掩耳盗铃地认为电站的水下设施和环境不需要进行定期检测。对于如此严苛的检测条件,采用携带水下定位系统的ROV潜水机器人这一技术进行检测不失为一种科学、可靠、高效的解决方案。
2 潜水机器人的主要技术性能与优势
ROV潜水机器人携带水下定位系统进行水下检测是一项新兴而发展迅速的应用技术,目前已经广泛使用在科考、海油工程、军警水下探测、水利大坝检测、水下管线检测等领域,图1为ROV SEAMOR携带水下定位系统的照片。

图1 水下机器人Fig.1 Remote operated vehicle
本次检测工作选择由ROV SEAMOR 300搭载水下定位系统进行,为配合长距离和大深度检测,专门使用了“0”浮力光缆,此技术解决了高水位和深度检测的难点,能使ROV潜水机器人充分发挥可深潜、机动能力强、速度快、行进距离长等特点。水下定位系统具有信号强、水下成像清晰、扫描频率高、体积小巧等特点。正确、合理地运用此技术进行电站水下检测具有效率高、工期短、使用安全、易于操作、可靠性高、检测结果客观真实等优点,弥补了传统人工下水检测的不足。
2.1 水下定位系统简介和特点
水下定位系统(underwater positioning system)是利用深水摄像机和水下定位传感器等对水下目标进行探测、定位和通信的电子设备,是水下检测领域应用最广泛、最重要的一种装置。
现在一些传感器的成像特点与传统意义的光学成像有非常大的不同,很多类似技术最早用于军事、工业和海洋渔业。前些年这些技术则主要用于完成一些特种工程和特种检测,并以检测报告作为一项重要依据。近年来,随着传感器技术的快速进步,其应用领域也随之快速扩展开来。现在大多数的水下定位传感器都可以准确地检测出水下设施的结构和功能状况,水下成像系统应用日渐成熟,实际作业中可靠性高,反馈数据客观准确,相应软硬件开发完善,为水下设施和环境检测提供了更加安全、科学和有效的检测手段。比起人工下水和其他传统技术更适合电站水下设施的检测。
目前为止,国内已经有多种匹配水下定位系统的传感器研制成功,并且已将它们相应地运用到军事、民用等领域。其中常用的水声定位系统包括:长基线定位系统(Long base line)、短基线定位系统(Short base line)、超短基线定位系统(Ultra short base line),但以上的定位方式局限于开放水域,引水隧洞是一个相对封闭的水域,以上的定位系统很难施展,所以此次定位采用了一种全新的水下影像相对定位方法(Digital Profiling Sonar)(见图2)。

图2 水下影像定位Fig.2 Digital profiling sonar
此次水下定位系统携带的S型传感器特点如下:S型传感器适用于有水环境下的水利设施水下建筑和环境检测,适用范围为内径200~6 000 mm多种规格的隧洞、沟渠、箱涵、管道等。传感器以1.4°圆锥型声波圆形连续扫描,扫描速度为1s/圈(1m管径),根据回波形成扫描图像,可以清晰地显示机器人在隧洞截面的相对位置,分辨率可达1/250,通过系统的操作画面直观地显示水下设施和环境状态,为分析、决策、维修、养护提供依据。由于此次检测目标很大一部分为引水隧洞,基于以上特点,S型传感器被选择集成到此次南水检测的水下定位系统里。
2.2 ROV潜水机器人简介和特点
ROV(Remote Operated Vehicles)遥控潜水器,也称潜水机器人,一种工作于水下的极限作业机器人,能代替人完成某些操作。在恶劣危险的水下环境中,人的潜水深度受到限制,所以ROV已经成为开发水下作业的重要工具。它的工作方式是由水上的工作人员通过连接ROV的脐带电缆提供动力,操纵或控制ROV,通过水下视频摄像、水下定位系统等专用设备进行观察,还可以通过机械手臂进行作业。典型的ROV潜水机器人是由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体(见图1)在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯和声纳系统等)和作业设备(机械手、切割器、清洗器等)。
此次南水电站检测选用的ROV潜水机器人的特点如下:此次选择的ROV Seamor 300F型潜水机器人系统属于观测级,主要用于深潜观测作业,具有最大水下500 m的水下工作能力,装备有高清晰彩色摄像机、四支强力推进器、定位仪、压力和深度传感器等。Seamor 300F控制简单、动作灵活,可自动巡航、悬停、左右横向移动(此横向位移功能非常适合于此次电站水下检测作业),其开放式的结构设计可以搭载多种测量设备。在本次电站水下检测中,Seamor 300搭载声纳系统顺利完成了对水下30 m深、长度超过200 m的引水隧洞的检测工作,成功且出色地实现了搭载平台的作用。
3 南水引水隧洞闸门井至拦污栅前隧洞检测情况
以此次南水电站水下检测为例,依据检测要求,结合水下检测技术运用要点等因素制定水下检测流程,其科学性和可行性通过此次检测得到最终验证。
通过检测,水下定位系统形成彩色可视图像记录和扫描数据记录,为进一步判断提供客观参考依据,所提供的完整检测图像可存档。此次检测客观反映了绝大部分水下设施的状态,包括良好状态、裂纹状态、贝类附着状态、拦污栅堵塞状态等。所有检测数据图像都自动保存至专业配套PC硬盘中,可随时提取、播放、抓取(如图3所示)。
ROV潜水机器人搭载水下定位系统对南水电站引水隧洞的检测工程安全顺利,设备操作简便,技术运用合理成熟,性价比高。检测全面准确,为评估电站水下设施状态提供了大量的科学数据支持,保存了大量的原始资料。检测成果如表1所示(部分)。

图3 水下检测图组Fig.3 Underwater detection
从整个检查结果看,此次南水电站水下检测图像完整,无图形缺失,检测数据连贯,水下检测目标设施总体状况优良,为业主方正确判断水工建筑安全情况提供了准确、详实的信息。工程取得了显著的成果,为今后国内其他水电站水下设施检测留下有益的数据支持和文献资料。
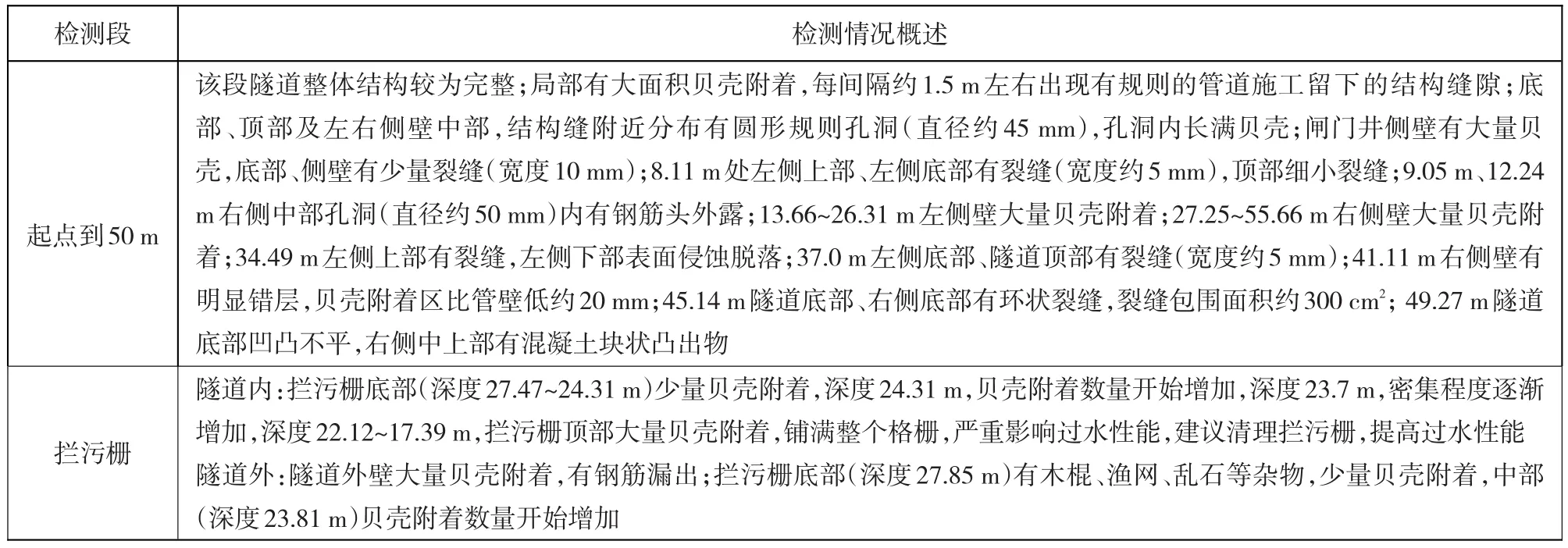
表1 检测成果表(部分)Table 1 Detection results(a part of it)
4 结语
(1)通过潜水机器人ROV对电站水下设施进行检测具有实用性。
(2)潜水机器人ROV可顺利通过、进入较为狭小的引水隧洞开展检测作业。
(3)通过视频增益处理,可一定程度提升水下视频影像的实用度。
(4)此项检测技术可一定程度解决目前电站水下检测的技术难点。
此技术在南水深孔有压式隧洞环境下检测工程中运用成功,取得了良好的经济和社会效益,它的规模化推广在电站水下设施检测工程中具有较强的实际意义。