电动汽车再生制动技术研究
2015-01-16山西中北大学研究生院车辆工程系成龙崔俊杰
山西中北大学研究生院车辆工程系 成龙 崔俊杰
1 引言
再生制动是电动汽车[1,2,3,4,5]最重要的特性之一。再生制动[1,2,3]是指在车辆减速或制动时,将其中一部分能量(车辆行驶动能和坡路上汽车具有的势能)转化为其他形式能量存储到能量存储系统中以备驱动时使用的过程。通常,电动汽车借助二次元件电动机被控制作为发电机运行,在不增加辅助装置的前提下,方便实现制动能量回收。这相比于传统的内燃机汽车而言更有优势,而其研究目前正处于起步阶段,有必要对其进行深入研究。
2 再生制动的节能分析
传统汽车的制动原理[2]即利用制动装置把汽车行驶的动能通过机械摩擦方式转换为热能散发掉,以达到使汽车制动或减速的目的。制动消耗的能量占到驱动能量的很大一部分,如果能将这部分能量进行回收,无疑将极大地提高汽车的运行经济性和安全性。再生制动技术做到了这一点,其理论节能分析如下:
当汽车在平直无坡道路上行驶时,其功率P表达式为:

式中:m为汽车总质量;g为重力加速度;f为汽车滚动阻力系数;Cd为空气阻力系数;A为汽车迎风面积;v为行驶车速;δ为汽车旋转部件旋转质量换算系数,δ>1。(注:P≥0时为驱动功率,p<0时为制动功率)
需求总能量E表达式为:

当E≥0时为驱动能量[1,2,3,5],则在驱动状态时,蓄电池需要消耗的能量E1表达式为:

当E<0时为制动能量[1,2,3,5],则在制动状态时,蓄电池需要回收的能量E2表达式为:

式中,η1为动力传动系统的驱动效率,η2为动力传动系统的回收效率。
给定一组汽车参数:m=1540kg;f=0.048;Cd=0.19;A=1.8m2;δ=1.05;η1=0.75;η2=0.65。分别在几种典型运行循环的回收工况下进行对比,如表1所示。由表可知,采用再生制动可获得较高的能量回收率。因此,再生制动对电动汽车的节能研究有重要的价值。

表1 典型运行循环能量回收对比
3 电动机再生制动原理
电动机的再生制动原理[2]即为在电动汽车制动时,二次元件电动机以发电状态运行,将汽车行驶的动能转化为电能保存至电能存储系统中。在此过程中,负的电枢电流产生制动性的转矩以降低汽车的行驶车速。
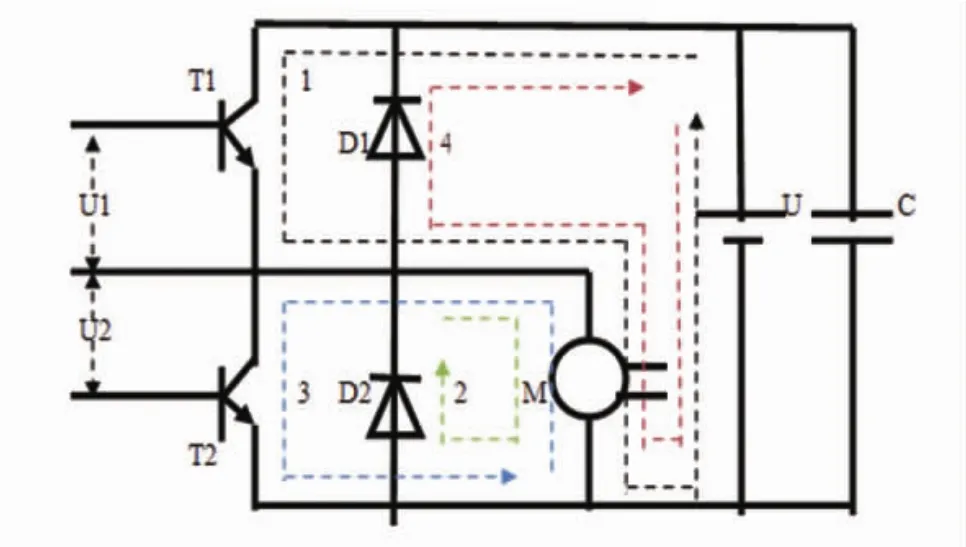
图1 二象限DC-DC变换器控制直流电动机工作原理图
图1为实现对直流电动机控制的二象限DC-DC变换器工作原理图。图中U1、U2为驱动电源电压,其大小相等,方向相反;T1、T2为绝缘栅晶体管;D1、D2为续流二极管;M为直流电动机;U为蓄电池等效电压;R为蓄电池等效电阻;C为外接电容。变换器的负载为直流电动机的电枢。基于图2所示,电动机的再生制动原理可从以下三种状态来进行分析。
3.1 电动状态
当电动机在电动状态下运行时,T1、D2交替导通,T2始终截止。T1导通时,蓄电池电压加到电枢两端,电流沿回路1流通;D2导通时,电流沿回路2续流。通过调节T1的导通占空比例δ(δ=Ud/U),可以改变电枢两端平均电压Ud的大小。
3.2 制动状态
制动过程中,T2、D1交替导通,T1始终截止。T2导通时,电动机反电动势E产生反向电流并沿回路3流通,产生能耗制动;D1导通时,反向电流沿回路4续流,对蓄电池充电。制动运行时产生的反向电流可获得制动性的电磁转矩,实现电动汽车的再生制动。
3.3 电动与制动转换状态
在制动状态时,出现T1关断后,电流沿回路2短暂续流。当电流衰减到0时,D2两端压差降为0,此时电动机反电动势E使T2饱和导通,产生沿回路3的反向电流,形成短时间的制动转矩。当T2关断时,反向电流沿回路4短暂续流。同样,若反向电流衰减到0时,反电动势E驱使T1导通,从而产生沿回路1的正向电流。所以,在一个开关周期内T1、D2、T2、D1轮流导通,实现电动与制动状态的平稳转换。
综上所述,在一个周期内的0<t≤δT区间,蓄电池电压通过T1或D1导通加在电枢两端;在δT≤t<T区间,电动机电枢通过T2或D2导通续流。因此,电动机电枢电流始终流通,其端电压为0,其平均电枢电流表达式为:

相应的蓄电池充电平均电流表达式为:

回馈蓄电池的功率表达式为:

回馈蓄电池的功率对制动功率的效率表达式为:

由上述公式可知,控制管T1的导通占空比δ,使之满足0<δ<E/U,可实现对蓄电池的充电。
4 电动机再生制动策略
保证整车制动性能的基础上,最大限度地回收制动能量,这是电动汽车制动策略的总体目标。具体到实际结构,就必须考虑汽车的总制动力需求、电动机所能提供的最大功率和能量存储装置的充、放电限制等因素,并结合控制的难易程度及成本,来制定再生制动的控制方法。
4.1 最大回馈功率制动策略[2]
该控制策略通过对制动过程中电枢电流的控制,以使回收功率达到最大。该策略的充电电流和回馈功率由公式(7),令 dP/dδ=0,得:

由上式可知,该策略的充电电流和回馈功率达到最大,回馈能量的最大效率≤50%。但该策略在车速较高时,蓄电池的充电电流和电枢电流往往会超过限值。
4.2 最大回馈效率制动策略[2]

整车回馈效率[2]为:取dηv/d Id=0,得最大回馈效率制动策略的电动机
电枢电流表达式为:

式中,Tv为电动机负载转矩,k为反电动势系数,ω为电动机转速,R为电动机等效内阻。
这种控制方法对电枢电流的控制,需要实时检测车辆阻力,增加了控制的不确定性,实用性较差。
4.3 恒定充电电流制动策略[2]
为避免过大充电电流对蓄电池造成损害,现提出一种更实用的控制策略。即在制动过程中,以蓄电池充电电流为被控对象,所选取的蓄电池充电电流必须满足:

该策略虽然能保证蓄电池的安全充电,但随着车速的降低,电枢电流持续上升,有可能超过电枢允许最大电流,所以必须对充电电流的大小加以限制。另外,当制动踏板的开度与充电电流相对应时,在相同的踏板开度下,随着车速的降低,汽车将获得逐渐增大的制动力,这种现象不符合驾驶员的操作习惯。
4.4 恒定力矩制动策略[2]
综上四种制动控制策略的分析可知,对于电动汽车的制动系统,要同时实现制动时驾驶员制动感觉与驾驶燃油汽车的一致性、最大化的能量回收和制动安全性,可以考虑来自制动踏板的制动需求、车速、电动机和蓄电池的电流限制等因素,综合采用各种电动机制动方法。
5 结语
面对能源和环境的压力,发展电动汽车,实现汽车节能与能量回收,在国际上已经形成了广泛共识。今后,对电动汽车再生制动技术的研究主要有三个重点。重点一是能量回收,这是再生制动技术的根本出发点。重点二是制动防抱死功能。重点三是稳定性控制。如何运用现代智能控制方法,在兼顾制动稳定和安全性以及能量回收的基础上,设计实用方便的再生制动系统,是其研究方向之一。再生制动技术作为汽车尤其是电动汽车技术的重要组成部分,它的进一步发展将会对汽车技术的发展产生推动力。
[1]张子英.车辆电储能制动能量回收系统研究 [D].中北大学,2011.
[2]叶敏,郭金刚.电动汽车再生制动及其控制技术 [M].人民交通出版社,北京.2013.
[3]张鹏.电动汽车制动能量回收系统的研究与实现 [D].哈尔滨工业大学,2010.
[4]万里翔.汽车制动能量回收系统的研究 [D].西南交通大学,2008.
[5]Mehrdad Ehsani等著,倪光正等译.现代电动汽车、混合动力电动汽车和燃料电池车—基本原理、理论和设计[M].机械工业出版社,2010.
