机器人使生产更快速、高效
——贝加莱将机器人技术无缝集成到自动化世界中
2015-01-16贝加莱工业自动化中国有限公司
贝加莱工业自动化(中国)有限公司
机器人使生产更快速、高效
——贝加莱将机器人技术无缝集成到自动化世界中
贝加莱工业自动化(中国)有限公司
1 引言
现在,越来越多的生产步骤被集成到塑料加工机械中。对于集成物料搬运和内部物流任务而言,机器人是可行的解决方案。由于典型的塑料加工要求循环周期很快,因此人类和机器人之间的协作必须完全同步并无缝集成。贝加莱已经将机器人技术无缝集成到自动化世界中,这样可以确保机器制造商最大限度地提高开发过程中的效率。
每年,欧盟加工约4500万吨塑料,这相当于约30%的钢材消耗量。各种成型工艺被用来将塑料熔体或粉末加工成固体产品。其中一种方法是注塑成型,它是将塑料融化,注射入模具然后压缩成型。即使高度复杂的部件也可以通过这种完全自动化的技术实现批量生产。
塑料加工机械制造商在提高其设备生产率方面不遗余力。一种普遍的做法是将越来越多的功能打包到每一台机器中,从而确保不间断生产,最终形成一个全自动化的生产过程。
2 机器人是提高生产效率的关键
机器人可以有效提高生产效率,所以,物料搬运设备和机器人正在承担越来越多的任务。
· 将金属嵌件固定在模具中待塑料包紧;
· 应用弹性体将硬质塑料部件密封;
· 将部件从模具中取出;
· 将部件输送至后续装配或包装站。
由于典型的塑料加工要求循环周期很快,因此机器人必须与机器的其它部分之间实现完美协调,从而确保动作精确同步。开模时间极短,但足以嵌入待包紧的金属件或取出成品件,因此机器人必须在一开模就能伸入模具。
为了尽量减少循环周期,机器人动作与注射装置动作必须完美协调。机器人与顶出装置之间的握手通信允许在不放缓循环周期的情况下取出部件。
3 集成解决方案节省时间和成本
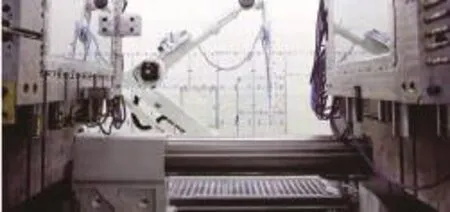
塑料加工机械实现同步生产要求快速的数据通信。贝加莱通过采用实时Ethernet POWERLINK协议连接所有外围设备解决了这一问题。

图1 同步过程依赖于快速的数据通信,贝加莱通过采用实时Ethernet POWERLINK协议连接所有外围设备。
为了以必要的速度协调动作,所涉及到的各个轴必须实现高度同步。传统方案中,各个动作分别由PLC、CNC和机器人控制器控制,几乎不适合处理集成传感器、执行机构和机器人的大量轴的情况。即使可以处理,各种硬件组件也会使该方案变得非常昂贵。
处理这些需求最有效的方式是使用贝加莱的集成自动化解决方案。贝加莱方案覆盖了整个加工链,可以对所有生产过程和动作进行统一控制,HMI和安全技术亦包含在同一个项目中。
同步过程依赖于快速的数据通信,贝加莱通过采用实时Ethernet POWERLINK协议连接所有外围设备以及智能驱动设备。
贝加莱的驱动组件可以轻松处理各种轴,即使在复杂的运动系统中也能提供微秒级同步,从而无需使用单独的机器人控制器,节省了相关硬件和培训成本。
4 掌控复杂任务
Automation Studio为机器自动化的各个方面提供了统一的软件环境:从HMI和PLC技术到运动控制、CNC和机器人技术。这使机器制造商可以根据需要处理加工、定位和可视化任务,并且毫不费力地保持它们之间的完全同步。即使是非常复杂的任务也可以在单个PLC上被快速执行。Automation Studio是一款能够满足任意要求的集成自动化软件。

图2 贝加莱采用独立于现场总线的openSAFETY协议用于安全功能如工具中心点安全限速(SLS@TCP)。openSAFETY允许用户自由选择最能满足他们应用需求的驱动技术。
与此同时,贝加莱的开发环境可以使整个开发过程受益。机器软件可以被划分开来由多个团队并行开发。一个整体复杂的程序可以被划分成数个模块,例如一个模块代表主设备,而另一个模块代表取走成品件的机器人。工程团队并行工作可以大幅减少开发时间,使塑料加工机械制造商紧随日益多样化和定制化的行业发展趋势。
硬件在环仿真允许开发者在无需制造样机的情况下就机器性能对代码效果进行测试。即使将第三方供应商的可选机器组件连接至整个系统,包括相应软件,也就像把打印机连至商用PC一样简单。
贝加莱软件开发环境中的语言解释器可以使机器制造商更轻松地将机器人集成到他们的机器设计中。这使现有程序,例如来自较早实施的带专用控制器的机器人系统,可以被重复使用。机器软件开发人员可以使用结构化文本对机器人应用进行编程。
5 经TÜV认证的工具中心点安全
Automation Studio可以为高效而可靠的安全控制程序开发提供一系列参数和功能块,包括经TÜV认证的SafeROBOTICS模块,它可以被用来监控机器人运动系统中的工具中心点安全限速(SLS@TCP)功能。
贝加莱集成SafeMC运动控制方案的伺服技术可以在接收安全数据的同时直接在驱动器中执行安全功能。ACOPOSmulti伺服驱动器的错误检测和响应时间为7毫秒,约是继电器安全电路的十分之一。这样就使停车距离缩短了100倍,因此单单减少机器占地面积就是一项显著的优势。
6 支持所需语言
贝加莱软件开发环境中的语言解释器可以使机器制造商更轻松地将机器人集成到他们的机器设计中。这使现有程序,例如来自较早实施的带专用控制器的机器人系统,可以被重复使用。机器软件开发人员可以使用结构化文本对机器人应用进行编程。
凭借丰富的机器人动作及整个机器配置选项,例如通过修改机器人加速度和运动曲线,塑料加工机械制造商能够为其客户提供全新的工具直接处理他们的生产流程。这样可以为优化能效和速度或适应各种机械手配置操作模式,无需编程。

图4 用户界面
5 结语
本文程序基本满足了道路照明设计中常用到的计算。利用计算程序寻找最优参数组合,省去了繁琐的试探性计算,提高了工作效率。照明设计参数具有明确的规范要求,但符合规范的参数组合不止一组,对于最优参数组合的筛选并没有统一的标准。因此,本文的程序设计除了在用户界面给出一组参数组合外,还将大量符合规范的参数组合进行了保存,便于用户进行自主筛选。另外,主程序设置了自主优化设计模块,可由用户自行设定参数,进行计算。
本文程序依然存在很多可以改进的地方,例如,程序设计中,除了高压钠灯外,可以增加其他光源种类;在电缆的选择方面,除铜电缆外,可增加铝芯电缆,并由用户进行选择。因此,主程序采用模块化结构,所有功能都通过调用子程序实现,可以方便地对程序进行改进和扩展。
[1] 高杰. 天津市志成道立交桥区高杆照明设计[J]. 照明工程学报, 2014,25(1):59 - 61.
[2] 姚家袆. 照明设计手册[M]. 北京: 中国电力出版社, 2006.
[3] 吴俊勇. 电力系统分析[M]. 北京: 北京交通大学出版社, 2012, 3
[4] 任元会. 工业与民用配电设计手册[M]. 北京: 中国电力出版社, 2015, 10.
于涛(1987-),男,助理工程师,硕士研究生,现就职于天津市市政工程设计研究院,从事市政行业电气及自动化设计及研究工作。
张泳(1971-),男,正高级工程师,硕士研究生,现就职于天津市市政工程设计研究院,从事市政行业电气及自动化设计及研究工作。
高杰(1984-),男,天津人,工程师,硕士研究生,现就职于天津市市政工程设计研究院,从事市政行业电气及自动化设计及研究工作。
