从灾后机载激光点云自动检测损毁房屋的等高线簇分析方法
2015-01-14何美章杜志强张叶廷林月冠
何美章,朱 庆,,杜志强,张叶廷,胡 翰,林月冠,齐 华
1.武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉430079;2.高速铁路运营安全空间信息技术国家地方联合工程实验室,四川成都611756;3.西南交通大学地球科学与环境工程学院,四川 成都611756;4.民政部国家减灾中心,北京100124
1 引 言
地震房屋损失实物量评估是防震减灾科学决策的重要基础,如何可靠完整检测损毁房屋是房屋损失实物量评估的前提。机载激光扫描技术不依赖光照条件,能够不分昼夜直接采集大范围房屋表面的三维信息,特别是多回波特性使其能够穿透植被采集被遮挡区域的房屋三维信息,因而被广泛应用于房屋的自动提取与三维重建以及损毁评估[1-8]。目前基于机载激光扫描点云数据的地震损毁房屋检测方法可以分为基于线的坡度阈值法、基于平面分割的方法和基于平面分割的分类方法。基于线的坡度阈值法[9]沿扫描线方向逐点计算两点间的坡度,将扫描线上左右两侧的坡度差值大于一定阈值的点作为损毁特征,该方法的主要问题在于屋顶平面相交处的点会被错误理解为损毁点。基于平面分割的方法[10-11]与基于平面分割的分类方法[12-14]在对房屋点云进行平面分割的基础。前者将分割产生的未分割点作为损毁特征,后者将平面性差或小尺寸的平面分割对象作为损毁特征,它们的损毁检测结果都十分依赖平面分割参数。这些损毁房屋检测方法主要针对规则的平面屋顶房屋,单方面利用二维或三维信息,从局部分析屋顶的平面特征,导致只能有效检测屋顶严重破碎的损毁房屋。依据反映房屋表面空间形状的等高线形态和分布规律,本文提出一种等高线簇相似分析的地震损毁房屋检测方法,该方法利用房屋等高线蕴含的丰富的二维和三维形状信息,从整体上准确识别和检测损毁的房屋,以克服现有方法从局部检测损毁房屋的局限性。
2 损毁检测原理
完好房屋表面的三维几何形状能用成组的等高线(等高线簇)进行有效表达,而且属于同一个等高线簇的等高线在拓扑上具有嵌套关系且形状上具有相似性[15-16],而损毁房屋由于表面高程的不规则变化导致等高线簇中等高线形状不相似。因此损毁房屋检测问题可转换为房屋等高线簇的相似分析问题。笔者引入等高线簇形状相似度的归一化信息熵来度量房屋等高线簇内等高线的形状多样性,将等高线簇形状相似度的归一化信息熵大于给定阈值的房屋等高线簇定义为损毁房屋等高线簇,而该给定阈值则采用最大熵模型从一组包含完好房屋等高线簇和损毁房屋等高线簇的等高线簇中自动提取。
基于Shannon信息论的信息熵能够对等高线的几何、拓扑和主题信息进行准确度量[17-20]。通过形状相似分析的等高线形状相似度是对等高线簇内两条等高线间的形状差异的定量描述[21-23],等高线簇形状相似度的信息熵则进一步从整体上对等高线簇内等高线的形状差异进行定量描述。其中等高线簇形状相似度的信息熵值越大,等高线簇内等高线的形状差异越大,等高线簇对应的房屋表面损毁越明显。因此等高线簇形状相似度的信息熵能够定量描述等高线簇对应房屋表面的损毁

式中,Pi为等高线簇形状相似分析过程中出现第i个不同相似度的概率;n为不同形状相似度的数量。
等高线簇的形状相似度的信息熵具有最小值和最大值,其中最小值为0,最大值与等高线簇中等高线数量相关。假设等高线簇中包含N条等高线,如果通过等高线间两两相似分析获取的相似度值完全不同,则信息熵具有最大值。此时等高线簇相似分析过程中出现的不同相似度数量为

每种相似度出现的概率为

将式(2)和式(3)代入式(1)则得信息熵最大值为

显然等高线簇形状相似度的信息熵与等高线簇中等高线数量相关,因此,为了对包含不同数量等高线的等高线簇形状差异进行统一定量描述,使等高线簇形状相似度的信息熵与等高线簇中等高线数量无关,利用式(5)对其进行归一化处理,得到等高线簇形状相似度的归一化信息熵
等高线簇形状相似度的归一化信息熵从0到1的变化在等高线簇形状的多样性上表现为从同一到各异的变化,因此根据损毁房屋检测的前提假设,损毁房屋等高线簇定义为

式中,δ为等高线簇形状相似度的归一化信息熵的阈值。
3 损毁检测方法
3.1 损毁检测流程
本文损毁检测方法输入数据为房屋点云数据,包括等高线生成、等高线分簇、等高线形状相似分析、特征指标计算和损毁检测5个步骤,具体流程如图1所示。
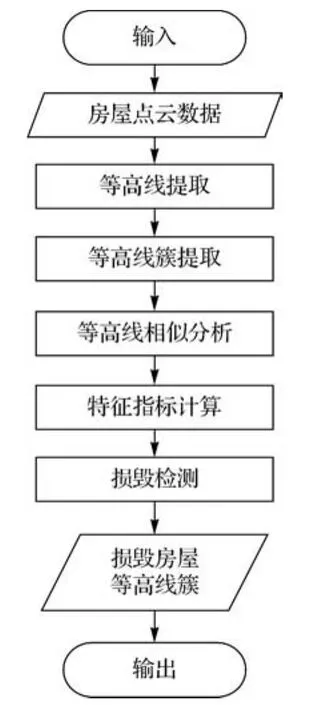
图1 损毁房屋检测流程Fig.1 Workflow for the proposed scheme
3.2 等高线提取
根据原始机载激光扫描点云构建三维TIN,在此基础上内插得到规则的Grid,达到平滑点云噪声的目的,最后在此Grid基础上按照一定等高距提取光滑等高线。
3.3 等高线分簇
首先在将闭合的房屋等高线作为树的一个节点,借助等高线之间的包含关系,按照等高线由外至内的嵌套层次顺序进行组织,构建等高线树。然后等高线簇是等高线树中的一个子树(如图2),按以下3条规则进行等高线初始分簇:①根节点在等高线树中无父节点,或有兄弟节点;②末节点在等高线树中无子节点或有多个子节点;③其他节点在等高线树中只有一个子节点。

图2 房屋等高线簇Fig.2 Contour clusters of building
最后,在初始等高线簇中,按照高程由小到大的顺序,依次计算相邻等高线间长度和面积的差值,对所得的一组长度和面积的差值进行聚类分析,提取差值过大的异常值,从异常长度差值对应的一对相邻等高线中间将初始等高线簇划分为若干组取精细化分簇的等高线簇。
3.4 等高线相似分析
完好房屋等高线簇内等高线间存在平移和缩放的相似关系[15],因此利用具有平移和缩放不变性的归一化傅里叶描述子描述等高线[21-23]。按式(7)将顶点数量为m的等高线的所有顶点以复数形式表示,并按照式(8)对复数形式的等高线顶点进行一维离散傅里叶转换,获得m个傅里叶系数Z=(z0,z1,…,zm-3)。
利用式(9)对等高线顶点的傅里叶系数进行归一化处理,获取m-2个具有平移、旋转和缩放不变性,且与起点无关等高线形状描述子FD={fd0,fd1,…,fdm-3}。

为了避免点云数据误差、噪声以及边缘特征不连续的干扰,利用两条等高线的归一化傅里叶描述子的特征分量中能够描述整体轮廓的前5个低频分量[23]的欧氏距离,从整体轮廓上度量这两条等高线间的相似度s

式中,t为傅里叶描述子的特征分量的数量;和为等高线簇内任意两条不同等高线的归一化傅里叶描述子。
3.5 特征指标计算
对等高线簇内N条等高线形状两两相似分析所得的一组总数为的形状相似度数值计算等高线簇形状相似度的归一化信息熵。首先求该组数值的最大值smax,并以组距d将数据分组,每组代表一种不同的相似度,则所得不同形状相似度的数量为

式中,操作符[]为取整。
接着统计各相似度的频率
最后将式(11)和式(13)代入式(5),计算等高线簇形状相似度的归一化信息熵。
3.6 损毁检测
损毁房屋检测以等高线簇形状相似度的归一化信息熵为指标,以阈值δ将包含损毁和完好房屋等高线簇的等高线簇集合分割为完好房屋等高线簇和损毁房屋等高线簇这两个子集。由于基于熵的分割方法能够借助熵对事物信息量的数理异同性测度能力,构造不同的熵函数以帮助确定最优度量或最优控制实现分割[24],因此本文采用最大熵模型进行分割,即选择恰当的阈值δ,将房屋等高线簇集合分为完好等高线簇和损毁等高线簇两个子集,这两个子集所对应的所有等高线簇的概率之和分别构成两个事件,这两个事件的信息增益的数学期望就是熵。显然,此时等高线簇的熵是阈值δ的函数,通过迭代优化控制,当熵取得最大值时,等高线簇的两个子集合的概率最接近,其信息增益最小或者信息量变化最小,获得最优化分割。

式中,t为分割阈值,[Kt]([]为取整操作)为该阈值对应的直方图组号;pi、pj分别为直方图第i、j组的频率。
4 试验与分析
4.1 试验数据
从由美国国家科学基金会免费提供的2010年4月El Mayor-Cucapah地震断裂带的机载激光点云数据中选取7个不同形态房屋的点云数据(如图3)作为试验数据进行损毁房屋检测试验,其中点云数据由Optech“双子座”机载激光雷达测图系统采集所得,点云密度为9.12个/m2,水平采样间距为0.33m、垂直精度为0.05~0.3m。为了验证等高线簇相似分析的地震损毁房屋检测方法的有效性,以目视解译获取的房屋损毁信息为依据对试验结果的准确性进行分析,其中房屋损毁信息如表1所示。

表1 房屋损毁信息Tab.1 Basic information of various buildings
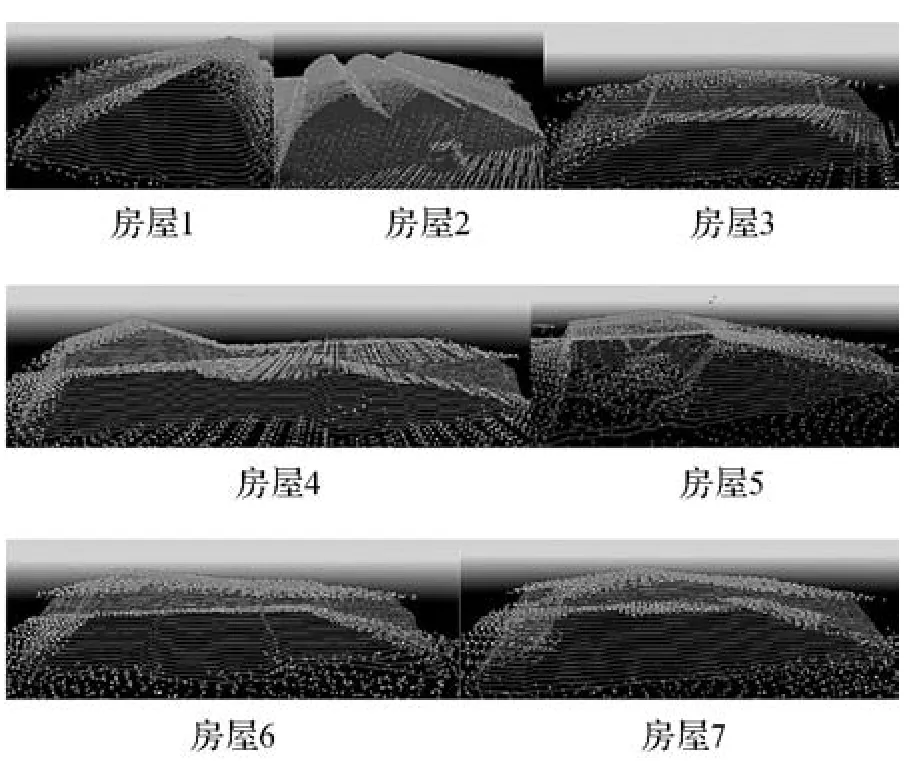
图3 房屋点云数据Fig.3 Laser data of various buildings
4.2 试验结果与分析
本文方法利用房屋等高线所蕴含的二、三维形状信息检测损毁房屋,而等高距是房屋等高线所蕴含二、三维信息信息量的重要指标,因此合理的等高距对本文方法至关重要。合理的等高距设置需要综合考虑机载激光扫描点云的平面和高程精度以及点云分布密度,还需要考虑可有效识别的损毁房屋的三维尺寸。根据4.1节所述的试验数据,本文试验拟检测0.1m大小的损毁特征,分别利用0.05m、0.075m、0.1m 和0.125m4种等高距的房屋等高线检测损毁房屋,如图4所示。
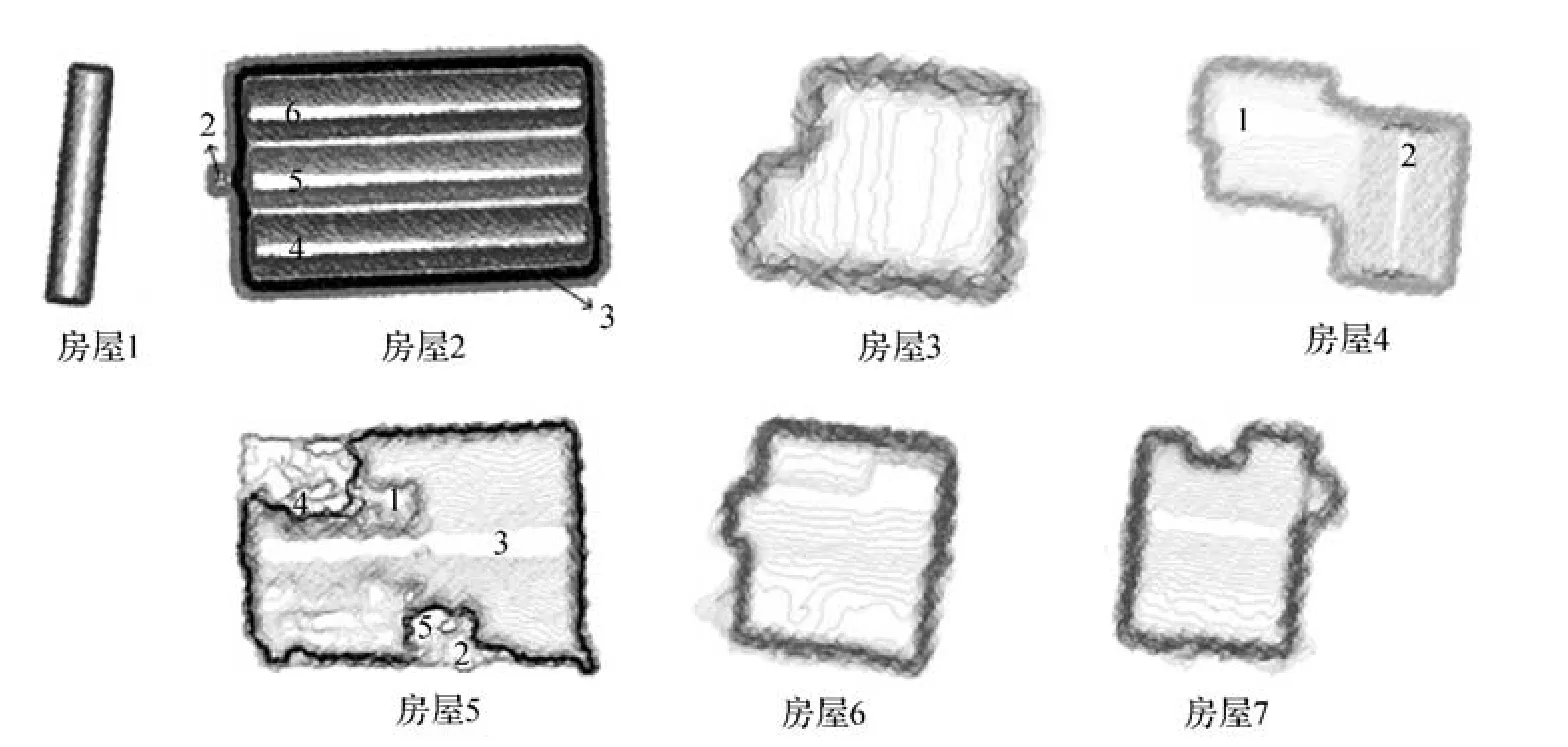
图4 等高距=0.05m的房屋等高线簇Fig.4 Contour clusters of various buildings at contour interval=0.05m
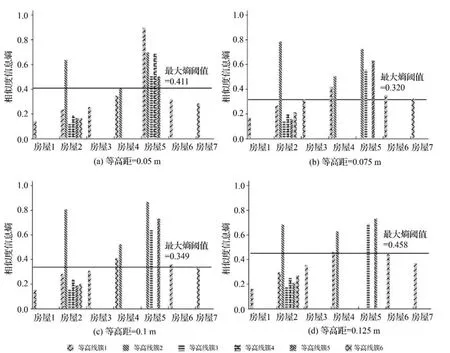
图5 损毁房屋检测结果Fig.5 Results of building damage detection
4个不同等高距下的损毁房屋检测结果如图5所示。通过与目视判读结果的对比分析表明0.075m等高距下损毁房屋检测结果非常理想。0.05m等高距的密集房屋等高线造成大量信息冗余,不仅导致计算代价大,还降低对损毁特征的敏感性。0.1m和0.125m等高距使得房屋等高线稀疏,导致其所蕴含的房屋二、三维信息的信息量减少,以及有效识别房屋损毁特征的能力减弱。
5 结 论
本文分析了地震损毁房屋的特征和激光扫描点云数据的特点,运用点云间接处理的思想,将损毁房屋识别难题转换为等高线相似性分析问题,提出了一种等高线簇分析方法。该方法首先将散乱的点云数据转换为规则的数字表面模型,达到平滑噪声的目的;其次在此表面模型基础上提取光滑等高线,通过等高线分簇建立房屋等高线簇的拓扑关系树,并引入归一化信息熵对等高线簇的形状相似度进行准确度量;基于该度量指标采用最大熵模型进行迭代计算最终实现完好房屋和损毁房屋的最优化分割,从而有效检测出损毁房屋。通过分析和试验验证,本文所提出的灾后机载激光点云损毁房屋检测的等高线簇分析方法突破了散乱点云直接处理易受噪声干扰,且难以综合考虑房屋复杂的三维形状特征的局限,有效地将房屋丰富的三维形状信息转化为二维等高线分布,并能准确度量这种相似性分布特征。等高距是本文方法的关键参数,等高距过大或过小会导致房屋等高线簇所蕴含的二、三维信息的信息量不够或者冗余,都会影响损毁房屋检测的精度或效率。实际数据处理表明,采用0.075m等高距提取的房屋等高线簇能够有效克服已有方法仅能从局部检测房屋损毁特征的局限,可靠完整地检测地震损毁房屋。
[1]CHENG Liang,GONG Jianya.Building Boundary Extraction Using Very High Resolution Images and LiDAR[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):391-393,399.(程亮,龚健雅.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法[J].测绘学报,2008,37(3):391-393,399.)
[2]SUN Ying,ZHANG Xinchang,KANG Tingjun,et al.Improved GAC Model for Automatic Building Extraction from LiDAR Point Clouds and Aerial Image[J].Acta Geodaetica et Cartographica Sinica,2013,42(3):337-343,350.(孙颖,张新长,康停军,等.改进GAC模型在点云和影像自动提取建筑物边界中的应用[J].测绘学报,2013,42(3):337-343,350.)
[3]LI Ying,FENG Zhongke,WANG Haiping,et al.Threedimensional Modeling of Buildings Based on LiDAR Point Cloud[J].Forest Inventory and Planning,2011,36(6):29-31.(李影,冯仲科,王海平,等.基于LiDAR点云的建筑物的三维建模[J].林业调查规划,2011,36(6):29-31.)
[4]CHEN Zhou,MA Hongchao.Automatic Extracting and Modeling Approach of City Cloverleaf from Airborne LiDAR Data[J].Acta Geodaetica et Cartographica Sinica,2012,41(2):252-258.(陈卓,马洪超.基于机载LiDAR数据的大型立交桥自动提取与建模方法[J].测绘学报,2012,41(2):252-258.)
[5]CHENG Liang.3DBuilding Model Reconstruction from Imagery and LiDAR Data[J].Acta Geodaetica et Cartographica Sinica,2009,38(4):376.(程亮.集成影像与LiDAR数据重建3维建筑物模型研究[J].测绘学报,2009,38(4):376.)
[6]SCHWEIER C,MARKUS M.Classification of Collapsed Buildings for Fast Damage and Loss Assessment[J].Bulletin of Earthquake Engineering,2006,4(2):177-192.
[7]DONG L G,SHAN J.A Comprehensive Review of Earthquake-induced Building Damage Detection with Remote Sensing Techniques[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,84:85-99.
[8]OLSEN M J,CHEN Z,HUTCHINSON T,et al.Optical Techniques for Multiscale Damage Assessment[J].Geomatics,Natural Hazards and Risk,2012,4(1):49-70.
[9]LABIAK R C,VAN AARDT J A,BESPALOV D,et al.Automated Method for Detection and Quantification of Building Damage and Debris Using Post-Disaster LiDAR Data[C]∥Proceedings of SPIE 8037,Laser Radar Technology and Applications XVI.Orlando:SPIE,2011:80370F.
[10]REHOR M,BÄHR H.Segmention of Damaged Buildings from Laser Scanning Data[C]∥International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences.Bonn,Germany:[s.n.],XXXVI,Part 3,2006:67-72.
[11]REHOR M,BÄHR H,TARSHA-KURDI F,et al.Contribution of Two Plane Detection Algorithms to Recognition of Intact and Damaged Buildings in LiDAR Data[J].The Photogrammetric Record,2008,23(124):441-456.
[12]ELBERINK S O,SHOKO M,FATHI S A,et al.Detection of Collapsed Buildings by Classifying Segmented Airborne Laser Scanner Data[C]∥Proceedings of International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences.Calgary:[s.n.],2011,XXXVIII(5/W12):307-312.
[13]KHOSHELHAM K,ELBERINK S O.Role of Dimensionality Reduction in Segment-based Classification of Damaged Building Roofs in Airborne Laser Scanning Data[C]∥Proceedings of the 4th GEOBIA.Brazil:Rio de Janeiro,2012:372-377.
[14]KHOSHELHAM K,OUDE ELBERINK S,SUDAN X.Segment-based Classification of Damaged Building Roofs in Aerial Laser Scanning Data[J].IEEE Geoscience and Remote Sensing Letters,2013,10(5):1258-1262.
[15]ZHANG Jing,LI Lelin,JIANG Wanshou.Contour Clustering Analysis for Building Reconstruction from LIDAR Data[J].Journal of Geo-Information Science,2010,12(5):641-648.(张靖,李乐林,江万寿.基于等高线簇分析的复杂建筑物模型重建方法[J].地球信息科学学报,2010,12(5):641-648.)
[16]JIANG Wangshou,GUO Dahai,ZHANG Jing,et al.Analysis of Airborne Laser Scanning Point Cloud for oveall Filter Bused on the Coutour of Cluster.Wuhan,201010262366[P].2011-02-16.(江万寿,郭大海,张靖,等.基于等高线簇分析的机载激光扫描点云整体滤波方法:中国武汉,201010262366[P].2011-02-16.)
[17]CHEN Jie,DENG Min,XU Feng,et al.A Measurement Approach for Spatial Information of Area Map[J].Science of Surveying and Mapping,2010,35(1):74-76,49.(陈杰,邓敏,徐枫,等.面状地图空间信息度量方法研究[J].测绘科学,2010,35(1):74-76,49.)
[18]LIU Huimin,FAN Zide,DENG Min,et al.A Hierarchical Approach to Measuring the Information Content of the Contours in a Map[J].Acta Geodaetica et Cartographica Sinica,2012,41(5):777-783.(刘慧敏,樊子德,邓敏,等.地图上等高线信息度量的层次方法研究[J].测绘学报,2012,41(5):777-783.)
[19]LI Z L,HUANG P Z.Quantitative Measures for Spatial Information of Maps[J].International Journal of Geographical Information Science,2002,16(7):699-709.
[20]LIU Wenkai,QIAO Chaofei,CHEN Yunhao,et al.Quantitative Measures for Spatial Information of Contour Maps[J].Geomatics and Information Science of Wuhan University,2008,33(2):157-159,196.(刘文锴,乔朝飞,陈云浩,等.等高线图信息定量度量研究[J].武汉大学学报:信息科学版,2008,33(2):157-159,196.)
[21]LIU Pengcheng,LUO Jing,AI Tinghua,et al.Evaluation Model for Similarity Based on Curve Generalization[J].Geomatics and Information Science of Wuhan University,2012,37(1):114-117.(刘鹏程,罗静,艾廷华,等.基于线要素综合的形状相似性评价模型[J].武汉大学学报:信息科学版,2012,37(1):114-117.)
[22]LIU Mei,LIU Weidong,XU Rongqing,et al.Image Retrieval Based on Wavelet Transform and Fourier Descriptors[J].Systems Engineering and Electronics,2003,25(8):1000-1002.(刘梅,刘伟东,许荣庆,等.基于小波变换及傅里叶描述子的图像检索[J].系统工程与电子技术,2003,25(8):1000-1002.)
[23]WAN Wei,FENG Xuezhi,XIAO Pengfeng,et al.Shape Feature Representation of Ground Objects from Highresolution Remotely Sensed Imagery Based on Fourier Descriptors[J].Journal of Remote Sensing,2011,15(1):73-87.(万玮,冯学智,肖鹏峰,等.基于傅里叶描述子的高分辨率遥感图像地物形状特征表达[J].遥感学报,2011,15(1):73-87.)
[24]CAO Jiannong.Review on Image Segmentation Based on Entropy[J].PR & AI,2012,25(6):958-971.(曹建农.图像分割的熵方法综述[J].模式识别与人工智能,2012,25(6):958-971.)
