核电站蒸汽发生器水位模糊控制系统的设计与仿真
2015-01-13冯玉昌史冬琳张秀宇
冯玉昌 史冬琳 张秀宇
(东北电力大学自动化工程学院,吉林 吉林 132012)
蒸汽发生器(Steam Generator,SG)是压水堆核动力装置中的重要设备,其主要作用是把一回路冷却剂从反应堆芯带出的热量传递给二回路。为保证核电站运行的安全性和经济性,SG水位必须控制在一定的范围内,由于SG水位控制对象具有明显的非线性、时变性和不确定性,系统的内扰、外扰都可能引起水位的明显波动,特别是蒸汽量的扰动,会产生“虚假水位”,这使得SG水位控制变得非常困难[1]。为提高水位的控制效果,在常规的串级三冲量控制系统的基础上,一些先进的控制方法被应用于水位控制过程研究。文献[1]将水位控制对象等效为二阶系统,建立了SG水位的二阶自抗扰控制系统,利用扩张状态观测器对系统的内扰、外扰进行实时估计,通过前馈给予补偿,改善了系统的快速性和稳定性。文献[2]设计了两个对角回归神经网络DRNI和DRNC,DRNI可自动动态辨识SG水位变化率,从而获得被控对象的Jacobian信息;用DRNC自适应控制SG水位变化率,通过选择合适的动态学习率,对DRNI和DRNC用梯度下降法自动调整神经网络权值,实现对SG水位变化率的快速稳定辨识和自适应控制。由于常规的三冲量PID控制的参数难以整定,一些先进的控制算法应用于参数的在线整定并取得了较好的效果,例如,模糊自适应参数整定[3]、分层自适应模糊控制方法[4]、遗传算法[5,6]和改进的粒子群算法[7];文献[8]将内模控制方法引入到控制系统中,设计了内模控制器,该方法与变参数PID控制相比,减少了调节器参数,便于实时控制,增强了鲁棒性;文献[9~11]将模型预测控制引入到水位控制系统中;文献[12]设计了广义预测控制算法的控制器,提高了系统的控制质量。
为了进一步提高控制质量,更加全面地考虑水位被控对象的控制难点,笔者设计了一种以模糊控制器为核心的模糊前馈-串级水位控制系统。主调节器采用两输入单输出的模糊控制器,并引入积分控制器来消除误差,副调节器采用比例调节器,在控制器的共同作用下很好地解决了传统PID控制存在的问题。
1 蒸汽发生器水位传统PID控制系统
在传统PID控制系统设计中,为了能同时发挥前馈控制和串级控制的优点,将两者结合起来,组成前馈-串级控制系统,其结构框图如图1所示。
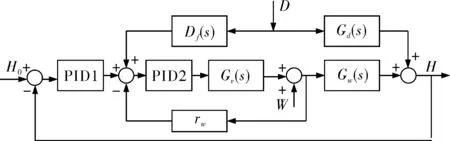
图1 蒸汽发生器水位前馈-串级控制系统结构框图
该系统主要由针对蒸汽流量设计的前馈补偿部分和由主回路和副回路组成的串级控制部分组成,具体结构和功能介绍如下:
a. 主回路由主调节器PID1和给水流量Gw(s)组成,实现对水位的准确、快速控制;
b. 副回路由副调节器PID2、调节阀Gv(s)和变送器rw组成,快速消除进入回路的扰动;
c.Df(s)为前馈补偿部分,对蒸汽流量扰动进行前馈补偿,Gd(s)为蒸汽流量传递函数;
d.D为蒸汽流量扰动,W为给水流量扰动。
蒸汽发生器水位控制系统中各传递函数为[13]:

(1)
(2)
(3)

(4)
rw=0.1,D=W=20
(5)
2 模糊控制器
2.1 模糊变量的模糊子集的确定
在选择描述模糊变量的各个模糊子集时,根据精确程度和控制要求一般选择7个等级较适合,使它们能较好地覆盖整个论域[14]。设定E代表偏差模糊子集,EC代表偏差变化率模糊子集,U代表输出量模糊子集。模糊子集取E、EC、U={NB,NM,NS,ZO,PS,PM,PB},输出控制量u的隶属度曲线如图2所示。输入量水位误差e和误差变化率ec的隶属度曲线与输出控制量u的隶属度曲线相似。定义模糊集上的论域e、ec={-6,6},取输入量e和ec的NB、PB为Z形隶属函数,NM、NS、ZO、PS、PM为三角形隶属函数。

图2 输出控制量u隶属度曲线
2.2 建立模糊控制规则表
根据运行经验,当e为负大、ec为负大时,偏差有增大的趋势,为尽快消除已有的负大偏差并抑制偏差变大,控制量的变化取负大;当e为负、ec为正时,系统本身已有减少误差的趋势,为尽快消除偏差且使控制不超调,取较小的控制量,便可得到控制规则(表1)。

表1 输出控制量u的模糊控制规则
2.3 确定比例因子和量化因子
根据工程实际情况,初步选择确定模糊控制器的各变量基本论域,其中蒸汽发生器水位偏差基本论域为-20~20dm;蒸汽流量偏差基本论域为-40~40kg/s;蒸汽发生器水位偏差变化率基本论域为-2~2dm/s[15]。设e的基本论域为[-Xe,Xe],对应的模糊论域为{-n,n},则量化因子Ke为:
Ke=n/Xe
(6)
同理,设ec的基本论域为[-Xec,Xec],对应的模糊论域为{-m,m},u的基本论域为[-Yu,Yu],对应的模糊论域为{-l,l},则量化因子Kec和比例因子Ku为:
Kec=m/Xec
(7)
Ku=Yu/l
(8)
量化因子Ke、Kec和比例因子Ku可以通过式(6)~(8)计算[16],并在仿真过程中采用试凑法微调,得出Ke=0.24,Kec=1.81,Ku=50.1。
对于比较复杂的被控过程,有时采用一组固定的量化因子和比例因子难以达到预期的控制效果,可以在控制过程中采用改变量化因子和比例因子的方法,来调整整个控制过程中不同阶段的控制特性,以使复杂过程控制收到良好的控制效果。
3 仿真分析
将设计好的模糊前馈-串级水位控制系统在Simulink中进行仿真(图3)。用模糊控制器来代替常规PID控制中的比例积分微分控制器,主调节器采用的是以误差e和误差变化率ec为输入、控制量u为输出的双输入单输出模糊控制器。在此基础上加入积分环节,以消除在扰动作用下引入的稳态误差,同时引入前馈控制,通过前馈和模糊控制器的共同作用,使蒸汽发生器水位维持在给定值,达到水位控制系统的要求。副调节器采用比例控制器,能快速消除进入到副回路中的各种扰动。传统PID控制系统中主调节器的参数分别为KP=20,KI=0.09,KD=2.5。副调节器为P控制器,参数为KP=10。

图3 蒸汽发生器水位模糊前馈-串级控制系统仿真
将传统PID控制与模糊控制在无扰动下相比较,输入为单位阶跃信号,得到的曲线如图4所示。
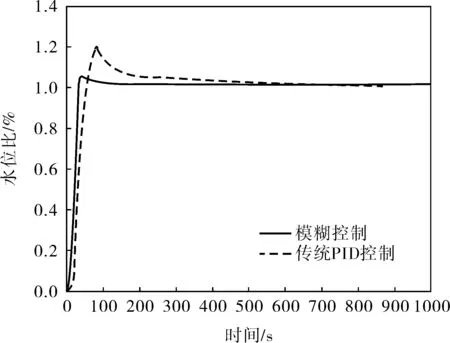
图4 无扰动下的水位动态特性
从图4可以看出,传统PID控制的超调量为19%,稳定时间为400s,而模糊控制的超调量为5%,稳定时间为100s,相比传统PID控制其超调量和稳定时间都大幅降低,控制系统的性能更好。
将传统PID控制与模糊控制在给水流量和蒸汽流量扰动下进行比较,在600s处加入幅值为5的阶跃干扰,得到的仿真曲线如图5、6所示。
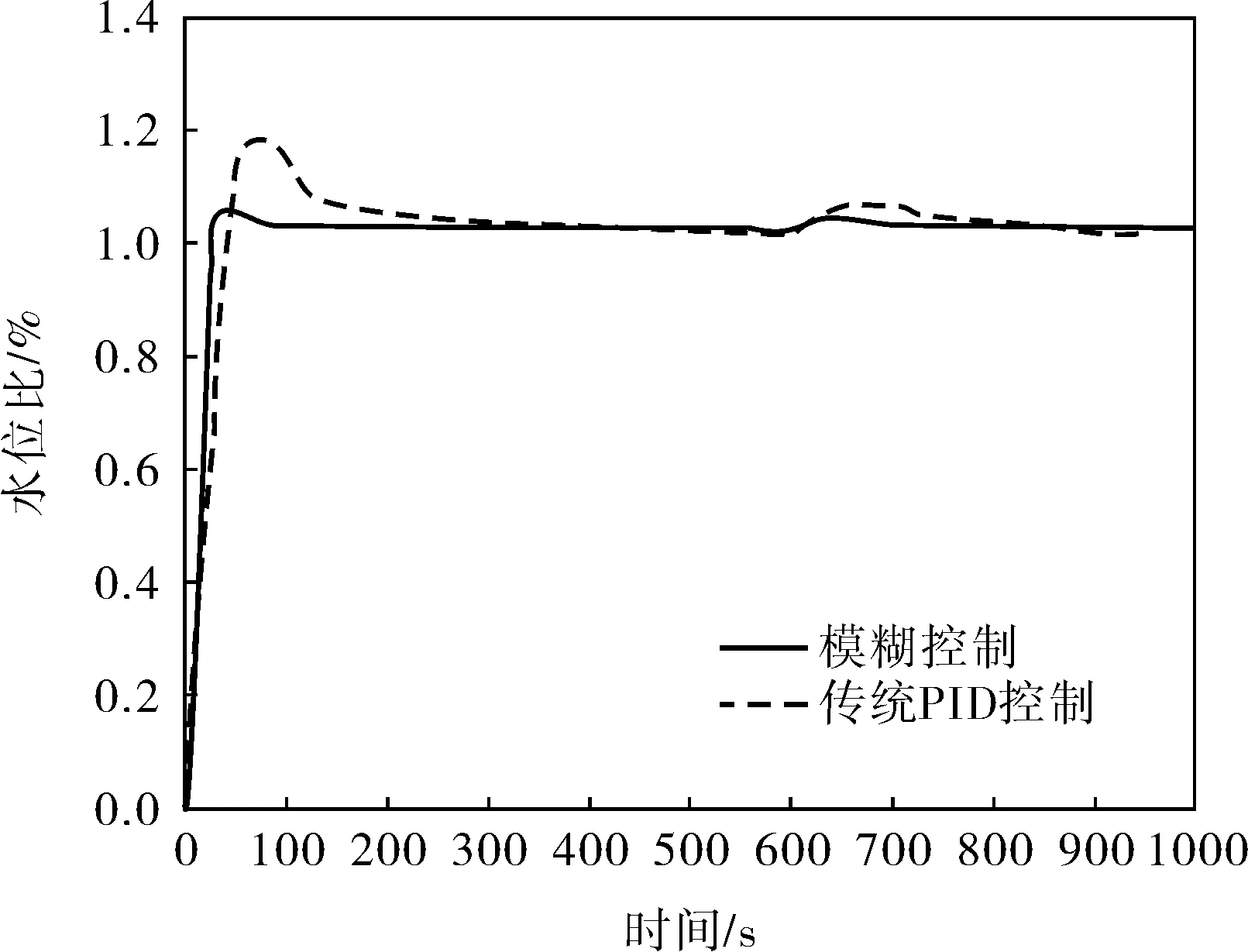
图5 给水流量扰动下的水位动态特性
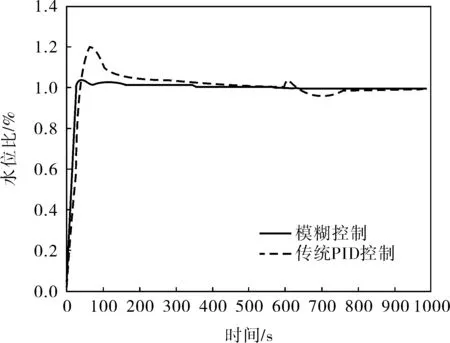
图6 蒸汽流量扰动下的水位动态特性
由图5、6可以看出,在给水流量扰动下,传统PID控制的稳定时间为160s,模糊控制的稳定时间为70s;在蒸汽流量扰动下,传统PID控制的稳定时间为300s,模糊控制的稳定时间为60s。模糊控制与传统PID控制相比,在各种扰动下,无论是超调量还是稳定时间都大幅降低,控制性能优于传统PID控制性能。
在实际生产过程中,并不能准确地获取核电站蒸汽发生器水位控制系统的模型,因此控制器的鲁棒性将直接影响整个控制系统的好坏,为比较模糊控制器与传统PID控制器的鲁棒性,将蒸汽发生器水位控制系统的被控对象改变为:
(9)

(10)
在此模型上对模糊控制器和传统PID控制器进行仿真比较,得到的曲线如图7所示。

图7 鲁棒性比较
由图7可以看出:传统PID控制器不能很好地适应被控对象的改变,超调量达到30%,水位达到稳定的时间长达400s,在给水流量扰动下350s达到稳定;而模糊控制器可以较好地适应被控对象的变化,超调量只有7%,水位稳定时间为150s,在给水流量扰动下140s达到稳定,由此可见模糊控制的鲁棒性比传统PID控制的强。
4 结束语
将模糊控制应用到了前馈-串级蒸汽发生器水位控制系统中,结合积分环节消除了稳态误差,与传统前馈-串级PID控制系统相比,无论超调量还是稳态响应时间都大幅降低,具有较强的鲁棒性和抗干扰性,是一种可行的控制策略。
[1] 陈红,曾建,王广军.蒸汽发生器水位的自抗扰控制[J].中国电机工程学报,2010,30(32):103~107.
[2] 王颖民,瞿小龙,崔震华.基于对角回归神经网络的饱和式蒸汽发生器水位控制[J].核动力工程,2007,28(3):90~93,124.
[3] 张宇声,郭立峰,蔡猛.基于模糊自适应参数整定的直流蒸汽发生器PID控制系统研究[J].核动力工程,2008,29(4):93~96.
[4] 滕树杰,张乃尧,崔震华.压水堆蒸汽发生器水位的分层自适应模糊控制[J].核动力工程,2003,24(3):281~284.
[5] 谷俊杰,米克嵩,徐培培.基于遗传算法的核电站蒸发器高阶水位模型的降阶方法[J].动力工程学报,2010,30(2):115~117.
[6] 李凤宇,张大发,王少明,等.基于遗传算法的蒸发器水位PID控制研究[J].原子能科学技术,2008,42(z1):137~141.
[7] 彭威,张大发.基于改进粒子群算法的蒸汽发生器水位控制优化[J].船海工程,2010,39(5):208~210.
[8] 米克嵩,谷俊杰,徐培培.内模控制方法在核电厂蒸汽发生器水位系统的应用[J].核动力工程,2010,31(6):29~32.
[9] 杨柳,袁景淇.压水堆蒸汽发生器水位的前馈模型预测控制[J].控制工程,2008,15(3):250~252.
[10] Hu K,Yuan J Q.Multi-model Predictive Control Method for Nuclear Steam Generator Water Level[J].Energy Conversion and Management,2008,49(5):1167~1174.
[11] Xu M,Li S Y,Cai W J.Cascade Generalized Predictive Control Strategy for Boiler Drum Level[J].ISA Transactions,2005,44(3):399~411.
[12] Na M G,Sim Y R, Lee Y J.Design of an Adaptive Predictive Controller for Steam Generators[J].IEEE Transactions on Nuclear Science,2003,50(1):186~193.
[13] 程启明,汪明媚,薛阳,等.核电站蒸汽发生器水位控制系统的仿真研究[J].计算机仿真,2012,29(2):188~193.
[14] 张永生,马运义.蒸汽发生器水位的模糊-PID复合控制[J].船海工程,2011,40(2):64~65,69.
[15] 刘小逵,张宇声,张广福.模糊控制在蒸汽发生器水位控制系统中的应用研究[J].海军工程大学学报,2003,15(3):84~87.
[16] 乔金宇.基于MATLAB/SIMULINK的锅炉汽包水位控制策略及仿真分析[D].兰州:兰州理工大学,2012.
