全垫升气垫船PID-非奇异终端滑模的航迹保持
2015-01-10丁福光朱超方胜王成龙陶顺行
丁福光,朱超,方胜,王成龙,陶顺行
(哈尔滨工程大学自动化学院,黑龙江 哈尔滨 150001)
全垫升气垫船PID-非奇异终端滑模的航迹保持
丁福光,朱超,方胜,王成龙,陶顺行
(哈尔滨工程大学自动化学院,黑龙江 哈尔滨 150001)
全垫升气垫船的操纵性较差,为使其在高速状态下能够准确的按设定航迹航行,设计了PID-非奇异终端滑模的航迹间接控制算法。外环的航迹引导采用PID控制,内环的航向跟踪采用非奇异终端滑模控制。利用滑模对非线性不确定性系统的强鲁棒性,弥补气垫船系数摄动问题,减小气垫船对外界干扰的敏感度。采用RBF神经网络辨识外界扰动来消除控制器抖振的影响,保持了滑模控制的强鲁棒性。仿真结果表明,在外界风干扰下,本文设计具有控制精度高﹑超调量小﹑稳定性好等特点,提高了气垫船的航迹保持能力。
全垫升气垫船;航迹控制;航向控制;终端滑模控制;PID控制
0 引言
船舶高速化是目前各国造船界研究的重点方向,全垫升气垫船就是典型的高速船之一。由于全垫升气垫船悬浮在水面上航行,具有阻力小,速度快,机动性好,越障能力强,吃水浅,两栖性,运载效率高等优点,在军事和民用领域有广泛应用[1],但也存在一定的缺点。由于全垫升气垫船悬浮在水面上航行,其主要依靠围裙内空气静压力来支持船体,利用空气螺旋桨产生推力,通过空气舵等装置进行控制操作,并以高速性和高耐波性为其主要标志。全垫升气垫船在高速航行状态下水动力系数及空气动力系数会随速度和环境干扰发生变化[2],特别是空气动力系数受船体表面积﹑上层建筑﹑风速﹑风向等影响较大,使其对外界扰动敏感,非线性强,获得精确的数学模型及控制律是非常困难的[3]。为了提高全垫升气垫船的控制水平,减少由于驾驶员操作不当引起的侧滑﹑埋艏﹑翻船等事故,研究全垫升气垫船的航迹控制具有重要意义。目前国内外对气垫船的航迹控制研究比较少,并且国外一般都采用直接控制方法.文[4]采用具有协调控制策略的串级控制结构实现航迹控制系统设计,在控制系统中根据航迹偏差采用模糊控制方法产生预计航向角,然后采用反步控制方法进行航向控制,并进行了半实物仿真。文[5]针对所建立的气垫船四阶航迹非线性系统,将系统分为4个子系统,每个子系统定义了1个误差变量和1个控制量,4个控制量中有3个控制为虚拟控制,并针对每个子系统定义了Lyapunov函数,基于Lyapunov稳定性定理和指数稳定性定理,推导出4阶运动方程,最后得到气垫船航迹控制律。文[6]采用了一种变结构模糊PID控制算法对气垫船的航迹保持进行了控制,并与普通PID控制方法进行了比较。文[7]设计了神经网络自抗扰航迹引导控制器及航向控制器,以提高其航迹控制效果。本文采用间接控制方法,由两个控制环组成,将航迹控制转换成航迹引导控制与航向控制问题,外环为航迹引导环由传统的PID进行控制,内环为航向控制环由RBF神经网络终端滑模进行控制。
1 全垫升气垫船三自由度平面运动模型

图1 固定坐标系和船体坐标系
由上述坐标系建立如下全垫升气垫船平面运动数学模型[1,8]:

2 PID-非奇异终端滑模航迹控制
本文所设计的航迹控制系统框图如图2所示。外环航迹引导控制器为PID控制器,航迹偏差作为PID控制器的输入,航向指令作为输出;内环航向跟踪控制器为终端滑模控制器,根据航向偏差值计算所需的控制力与力矩,作用于气垫船的空气舵产生控制舵角,使气垫船沿预定轨迹航行。

图2 PID-非奇异终端滑模的航迹控制框图
2.1 PID航迹控制器设计

图3 航迹控制算法


2.2 RBF神经网络终端滑模航向控制器设计
由全垫升气垫船三自由度平面运动模型(1)可以得到航向非线性系统模型:


2.2.1 滑模控制器设计
滑模变结构对非线性不确定性系统控制具有独特的效果[9],其本质是通过控制量的切换,使系统状态按照预定的“滑动模态”轨迹运动[10],从而保证系统在收到参数摄动和外界干扰具有不变性,对于不确定非线性系统,非奇异终端滑模控制器设计简单﹑鲁棒性好,响应速度快且具有终端滑模有限时间收敛的特点,相对于线性滑模具有更高的稳定性[11]。
对于系统(5),为进一步提高滑模控制系统的控制性能,并使系统到达平衡点的收敛速度进一步加快,选择非线性滑模面[12]为:

设计控制律u使系统在有限时间内到达滑模面,并使滑模面上的跟踪误差在有限时间内收敛到零。控制律形式为:

定理1 对于系统(5),选取滑模面(6),在控制律(7)的作用下,系统将在有限时间内到达滑模面,并使得滑模面上的跟踪误差在有限时间内收敛到零。
证明:选取Lyapunov函数

对式(8)求导为:)


根据文献[12],设tr为系统状态从任意时刻到达滑模面的时间,即。当时,可以得到
所以系统状态可以在有限时间内到达滑模面,并且所用时间比普通的滑模控制所用的时间要少。
2.2.2 RBF神经网络滑模航向控制器设计
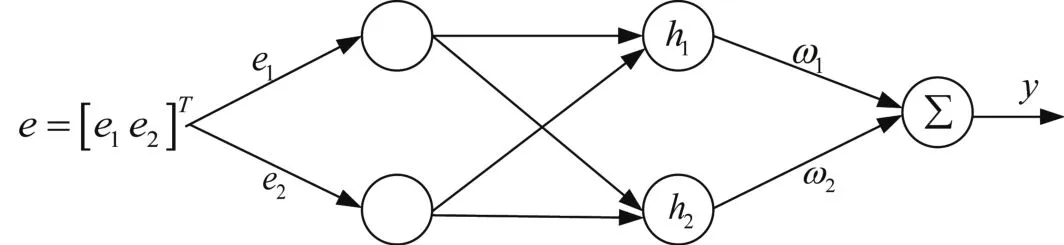
图4 RBF 神经网络结构图

其中网络第j个节点的中心向量为,网络的基宽向量,网络的权值向量为,则RBF网络的输出为:


根据梯度下降法,神经网络权值调节算法为:

其中,
神经网络的权值算法为∶

定理2 气垫船航向控制系统在控制律(17)的作用下,系统将在有限时间内到达滑模面,并使得滑模面上的跟踪误差在有限时间内收敛到零。
证明:选取如下Lyapunov函数

3 仿真实验
为了验证上述方法的可行性,针对某型全垫升气垫船进行航迹控制仿真,由于气垫船在航行过程中最主要的干扰为风,本文在风速10m/s,风向45°情况下模拟海况下进行仿真,在仿真过程中,气垫船处于全垫升状态,设定气垫船初始速度为30kn,初始北东位置为(0,0),保持左右浆的螺距角不变,仅靠调节空气舵来实现航向控制。设计直线设定航线起点为(1000,-1000),终点为(3000,20000)。
从仿真实验的图5-10可以看出,在外界干扰作用下,气垫船能够在高速航行中以较小的偏差沿预定航迹航行,并且快速,平稳,基本没有超调,具有较好的控制效果,实现了航迹的自动控制过程,提高了气垫船的航行安全。

图5 外界风变化曲线

图6 航迹变化曲线

图7 航向角变化曲线
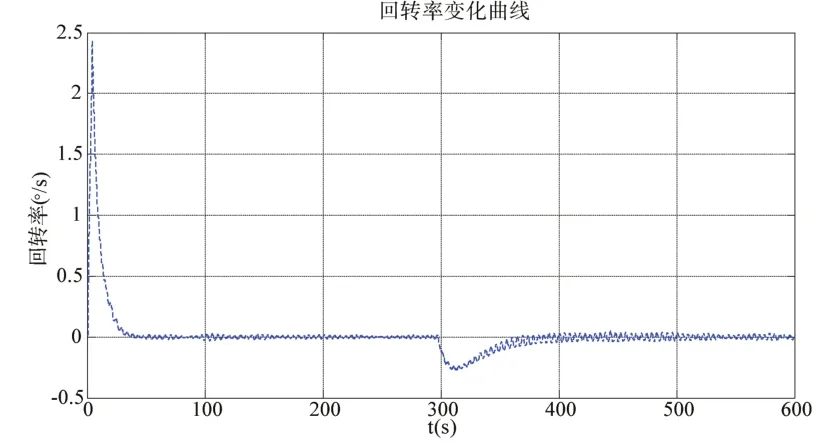
图8 回转率变化曲线
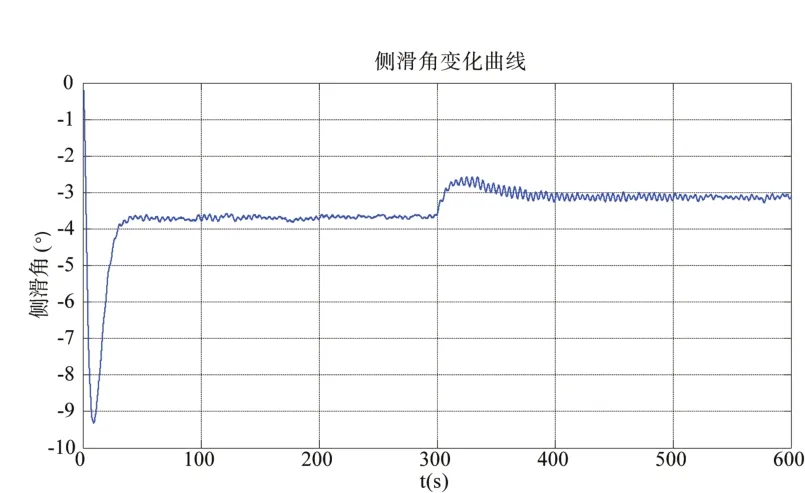
图9 测滑角变化曲线

图10 纵向速度变化曲线
4 结论
全垫升气垫船是一种典型的高性能船舶,在民用运输,军用巡航﹑扫雷﹑抢滩登陆等应用广泛。与常规水面船相比非线性强,操纵性差,针对航迹控制研究,本文采用间接控制方案,设计了航迹引导控制器和航向控制器,航迹引导控制器采用传统的PID控制,航向控制器采用了控制精度更高的非奇异终端滑模控制,并引入了实时性较强的RBF神经网络辨识外界干扰来降低控制器抖振的影响。仿真结果表明了所设计控制器的有效性,为气垫船海上航行提供了一种有效地控制方法,提高了气垫船的航行安全。
[1] 恽良.气垫船原理与设计[M].北京:国防工业出版社, 1990.
[2] 王成龙, 施小成, 付明玉, 等.神经网络PID在全垫升气垫船航向控制中的应用[J].中国造船, 2008, 49(3):62-67.WANG Chenglong , SHI Xiaocheng, FU Mingyu, et al.Application of the Neural Net PIDin Heading Control of Air Cushion Vehicle[J].shipbuilding of china, 2008, 49(3):62-67.
[3] 刘振业, 刘伟, 付明玉, 等.基于模糊自适应ADRC的全垫升气垫船航向控制[J].信息与控制, 2011, 40(6):747-752.Liu Zhenyh, Liu Wei, Fu Mingyu.Heading control of air cushion vehicles based on adaptive fuzzy ADRC[J].information and control, 2011, 40(6):747-752.
[4] 付明玉, 王奎民, 边信黔, 等.模糊—反步串级控制方法在气垫船航迹保持中的应用[J].中国造船, 2009, 50(1):83-91.Fu Mingyu, Wang Kueimin, Bian Xinqian, et al.The Application of Fuzzy-Back stepping Cascade Control in the Path-keeping of Air-Cushion Vessel[J].shipbuilding of china, 2009, 50(1):83-91.
[5] 付明玉, 施小成, 丁福光.气垫船航迹反步控制方法研究[J].哈尔滨工程大学学报, 2008, 29(3):251-255.Fu Mingyu, Shi Xiaocheng, Ding Fuguang.The backstepping method for navigational control of an aircushion vessel[J].Journal of Harbin Engineering University, 2008, 29(3):251-255.
[6] 匡红波, 施小成, 田亚杰, 等.全垫升气垫船航迹保持的变结构模糊PID控制[J].控制理论与应用, 2006, 25(8):4-6.KUANG Hong-bo, SHI Xiao-cheng, TIAN Ya-jie.A Track Keeping Variable Structure Fuzzy-PID Controller for Air Cushion Vehicle[J].Control Theory and Applications, 2006, 25(8):4-6.
[7] 刘振业, 刘伟, 施小成, 等.神经网络自抗扰全垫升气垫船航迹控制[J].哈尔滨工程大学学报, 2012, 33(3):283-288.LIU Zhenye, LIU Wei, FU Mingyu, et al.Trace-keeping of an air cushion vehicle based on an auto-disturbance rejection controller with a recurrent networks model[J].Journal of Harbin Engineering University, 2012, 33(3):283-288.
[8] CUMMING D, et al, “Mathematical Model of an Air Cushion Vehicle”, AD-A015699, NAVTRAEQUIPCE.73-C-0138-1.
[9] Choi H H.Sliding-mode output feedback control design[J].IEEE Trans on Industrial Electronics, 2008, 55(11):4047-4054.
[10] 孙彪, 孙秀霞, 陈琳, 等.基于幂次函数的离散滑模变结构控制算法[J].控制与决策, 2011, 26(2):285-288.Sun Biao, Sun Xiuxia, Chen Lin, et al.Algorithm of discrete-time sliding mode control based on power-function[J].Control and Decision, 2011, 26(2):285-288.
[11] 王亮, 刘向东, 盛永智.基于告诫滑模观测器的自适应时变滑模再入姿态控制[J].控制与决策, 2014, 29(2):1-6.WANG Liang, LIU Xiang-dong, SHENG Yong-zhi.High-order sliding mode observer based adaptive time-varying sliding mode for re-entry attitude control[J].Control and Decision, 2014, 29(2):1-6.
[12] 袁雷, 肖飞, 沈建清, 等.基于扰动观测器的不确定非线性系统非奇异终端滑模控制[J].控制与决策, 2014, 29(2):353-357.YUAN Lei1, XIAO Fei, SHEN Jianqing, et al.Nonsingular terminal sliding mode control with disturbance observer for uncertain nonlinear systems[J].Control and Decision, 2014, 29(2):353-357.
[13] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社, 2005.
[14] Fayez F.m, El-Sousy.Adaptive Dynamic Sliding-Mode Control System Using Recurrent RBFN for High-Performance Induction Motor Servo Drive[J].IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, 2013, 9(4):1922-1936.
[15] J.Park, J.W.Sandberg.Universal approximation using radial basis function network[J].Neural Computer, 1990, 3(2).
Trace-keeping Control of Air Cushion Vehicle based on PID- Nonsingular Terminal Sliding Mode Control
DING Fu-guang, ZHU Chao, FANG Sheng, WANG Cheng-long, TAO Shun-hang
(College of Automation, Harbin Engineering University, Harbin 150001, China)
A PID-nonsingular terminal sliding mode indirect control system, which is designed for enhancing the maneuverability and realizing the trace-keeping control accurately of air cushion vehicle(ACV) in high speed state is proposed in the paper.PID is introduced to design tracking guidance control which is outer loop.The nonsingular terminal sliding model control is researched for the course control that is inner loop.Sliding mode control as well known duce to its unique robust control performance for nonlinearity and uncertainty system.Then it is used to compensate for the uncertainties and reduce sensitivity to external disturbance of ACV.In order to reduce the chattering of the sliding mode control, a RBF neural network is introduced to approximate external disturbances to offset the disadvantages and guarantee robust performance.Under conditions of wind disturbances, the simulation results of the PID-nonsingular terminal sliding mode control system can achieve good stability and high precision.
air cushion vessel, tracking guidance control, course control, terminal sliding mode control, PID control
丁福光,朱超,方胜,等.全垫升气垫船PID-非奇异终端滑模的航迹保持[J].新型工业化,2015,5(5):1-8
10.3969/j.issn.2095-6649.2015.05.01
:DING Fu-guang, ZHU Chao, FANG Sheng,et al.Trace-keeping control of air cushion vehicle based on PID- nonsingular terminal sliding mode control [J].The Journal of New Industrialization, 2015, 5(5)∶ 1‒8.
国家自然科学基金(51309062)。
丁福光(1962-),教授,主要研究方面:船舶后控制的研究;朱超(1990-),男,硕士研究生,主要研究方面:船舶后控制的研究;方胜(1990-),男,硕士研究生,主要研究方面:船舶后控制的研究;王成龙(1978-) , 男, 博士生,主要研究方向:船舶操纵与控制;陶顺行(1990-),男,硕士研究生,主要研究方面:船舶后控制的研究。
