色噪声下卡尔曼滤波磁光成像焊缝跟踪算法
2015-01-09高向东萧振林陈晓辉
张 驰,高向东,萧振林,陈晓辉
(1.广东工业大学机电工程学院,广东广州510006;2.广州番禺高勋染整设备制造有限公司,广东番禺511400)
色噪声下卡尔曼滤波磁光成像焊缝跟踪算法
张 驰1,高向东1,萧振林2,陈晓辉2
(1.广东工业大学机电工程学院,广东广州510006;2.广州番禺高勋染整设备制造有限公司,广东番禺511400)
焊缝跟踪是保证激光焊接质量的前提,在激光焊接过程中,精确地识别和跟踪焊缝非常重要。以紧密对接平板激光焊为试验对象,研究一种色噪声环境下应用卡尔曼滤波最优状态估计对焊缝偏差进行预测的方法。使用磁光传感器摄取焊缝磁光图像并提取焊缝位置参数,建立基于焊缝位置参数的系统测量方程和状态方程。应用扩展状态向量的方法建立色噪声环境下的卡尔曼滤波算法,对焊缝位置进行最优状态估计,得到均方差极小值情况下的焊缝偏差预测最优值,减小系统噪声对焊缝位置识别的影响。试验结果表明所提方法可以显著提高焊缝跟踪的准确性。
焊缝跟踪;磁光成像;色噪声;卡尔曼滤波
0 前言
激光焊接是一种先进的焊接工艺技术,在现代加工制造中发挥着越来越重要的作用。激光焊接能量密度极高,热影响区域小,因此其对焊缝间隙有着严格的要求,为了保证激光焊接的质量,要求焊缝间隙必须远小于光斑直径。由于焊缝间隙小,使得激光束准确对中焊缝成为实现高质量焊接的重要因素,因此,焊接过程的精确跟踪是激光焊接的关键所在[1]。目前,焊缝跟踪方法主要有结构光视觉传感法、焊缝区直接图像传感法和激光频闪摄像法。这三种方法对于焊缝宽度小于0.1 mm的微间隙焊缝都难以实现精确有效地自动检测和跟踪[2-3],为此研究了一种基于磁光成像传感的焊缝识别新方法[4]。
在激光焊接过程中,被焊材料的温度、磁光传感器与焊件的间距都会产生波动,并影响到焊缝磁光成像。因此焊缝磁光图像必然包含很多噪声干扰。考虑到各种噪声的干扰,探索一种卡尔曼滤波预测焊缝偏差的新方法。从磁光传感器摄取的磁光图像中提取焊缝位置参数并构成状态向量,建立系统状态方程和测量方程。在此数学模型下应用卡尔曼滤波对焊缝位置参数进行最优估计,减小系统噪声与测量噪声对焊缝位置检测的影响,得到最小均方差条件下的焊缝偏差最优预测值,为焊缝的纠偏提供实时有效的控制参量,提高焊缝跟踪精度[5]。
1 磁光检测微间隙焊缝试验
根据法拉第旋光效应,一束线偏振光通过旋光性介质时,如果在介质中沿光传播方向施加外磁场B,则光通过介质后,光的振动面转过一定角度θ。转角θ在材料确定的情况下,主要与光的波长、外磁场强度、光在介质中传播的路程有关。通过法拉第旋光效应,构建焊缝跟踪试验平台,如图1所示。试验平台包括YAG激光焊接系统、磁光传感器、保护气(氩)、工作台、伺服控制电机和相应夹具等。
由于磁场激励器的影响,磁场在焊缝处会发生变化,磁光传感器能检测出这种磁场的变化,形成的磁光图像则包含了焊缝位置信息。以低碳钢平板紧密对接为试验研究对象,焊缝间隙小于0.1 mm,实物如图2a所示,图2b为其对应的磁光图像。

图1 焊缝跟踪试验装置示意

图2 焊缝实物图与磁光图像
2 焊缝位置参数和焊缝偏差
试验材料选用两块厚1.5 mm的紧密对接的低碳钢平板,焊件运动由工作台的精密伺服电动机驱动,试验条件如表1所示。为了充分反映实际生产环境中激光焊接的跟踪情况,试验采用偏斜焊缝路径,激光头行走路径横跨焊缝,依次经历左偏、对中、右偏三种情况,焊接路径如图3所示。磁光传感器刚性连接在激光头上,随激光头同步运动实时获取焊缝信息。激光头与磁光传感器相对位置固定,因此根据磁光传感器探测的焊缝偏差即可推算出激光束与焊缝之间的偏差信息。
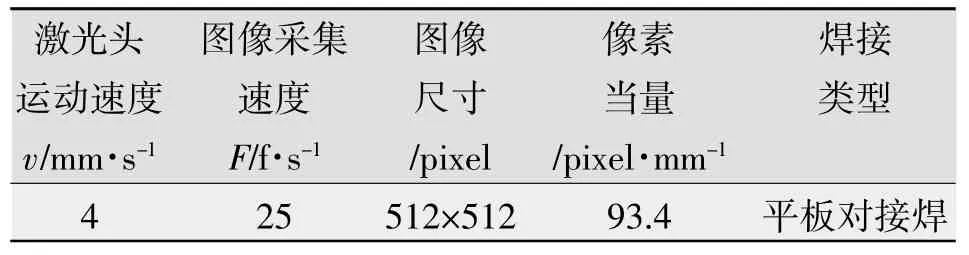
表1 激光焊接磁光成像试验条件
分析一组焊接动态序列磁光图像,通过灰度拉伸、中值滤波、二值化、形态学变换和边缘提取,得到焊缝中心,如图2c所示。计算焊缝偏差,得到焊缝位置参数测量值,如图4所示。焊接过程中焊缝偏差测量值与实际值较为接近,但由于系统噪声的干扰,测量值有一定波动。

图3 焊缝跟踪路径示意

图4 焊缝偏差实际值与测量值
3 系统状态方程与测量方程
建立精确的系统状态转移数学模型和测量模型是卡尔曼滤波预测焊缝位置的前提。焊接过程中,焊件相对于激光束在x-y平面上运动,定义焊缝位置在k时刻时为(x(k),y(k)),k+1时刻为(x(k+ 1),y(k+1)),k时刻,焊件x方向与激光束的相对运动速度为方向与激光束的相对运动速度为采样时间为t,激光束在x和y两个方向的加速度分别表示为ωx(k),ωy(k),则描述焊缝位置的方程可表述为[6]

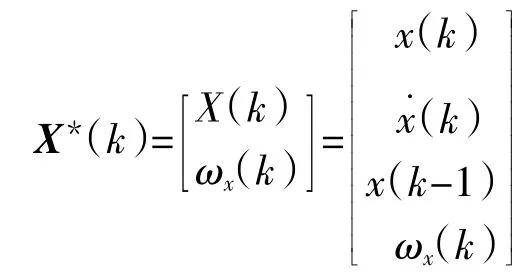
由于激光束与焊件在x方向与y方向相互独立地运动,而焊缝偏差主要产生在x方向,因此只考虑x方向即可。以焊缝当前位置参数、当前速度和前一时刻位置参数构造状态向量,即[6]

得到系统状态方程为[6]
1.报社问题频发,竞争激烈。“微时代”环境下有的传统媒体的生存状况不容乐观,同时,传统媒体之间的竞争更加激烈,形成“适者生存,不适者被淘汰”的局面。据2014年4月23日《人民日报》报道,因虚假新闻问题,200余家报刊被查处,这种严峻情况反映了传统媒体已经出现了生存危机,纸质媒体的销路受阻,人们对纸媒态度的淡漠等问题凸现出来,一些新闻记者或编辑“铤而走险”,结果导致报社受到严重惩罚。



4 色噪声卡尔曼滤波模型
实际焊接过程中系统动态噪声ωx(k)并非为白噪声,而是焊接系统所产生的相关色噪声。而在传统Kalman滤波的推导中,系统噪声和测量噪声必须是相互独立的高斯白噪声,色噪声的存在导致卡尔曼滤波的精度降低,因此在预测焊缝位置时无法直接用传统卡尔曼滤波算法进行处理,需要将有色噪声归入系统状态向量,实现色噪声的白化从而满足卡尔曼滤波对噪声的要求。
设系统动态噪声服从自回归模型,焊接过程色噪声采用一阶自回归模型表示,对实际焊接来说能够满足要求[7]。设

式中e(k)为高斯白噪声。
系统状态方程及焊缝位置测量方程为

即


通过以上系统状态向量维数扩展处理将系统色噪声白化,从而达到传统卡尔曼滤波对噪声的要求。应用卡尔曼滤波对状态方程进行处理,其流程如图5所示。
5 试验结果与分析
基于卡尔曼滤波的焊缝跟踪,是在观测序列Z(k)已知的条件下,使得估计误差达到最小方差的条件下,预测焊缝偏差。首先必须确定滤波的初始状态,以起始相邻两帧图像中的焊缝位置相关参数作为滤波的状态初始值。在噪声的影响下,相邻时刻焊缝位置参数偏移量在0.02 mm内随机波动,取系统动态噪声初值ωx(l)=0.01,得到滤波状态的初始值为

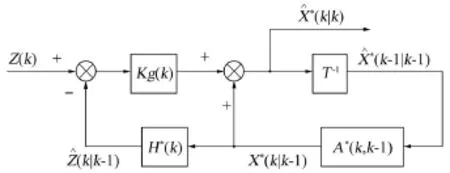
图5 卡尔曼滤波算法流程
计算k=2时刻的状态一步预测值

k=2时刻的测量值为

计算测量的预测值为

可得到状态向量最佳滤波值

完成一次滤波后,依次对每个时刻的焊缝位置参数进行滤波处理,得到整个焊接过程的焊缝偏差,如图6所示,可以看出,滤波后的焊缝偏差值比测量值更接近偏差的实际值。

图6 焊缝偏差实际值、测量值与滤波值
为更好地比较滤波后的焊缝偏差与测量值的精确度,定义焊缝误差其中α为焊缝偏差测量值或滤波值,β为焊缝偏差实际值。由此可知,焊缝误差e越小,焊缝偏差越接近实际值,跟踪精度越高。对试验所得的数据进行焊缝误差的计算,得到曲线如图7所示。滤波后的焊缝误差与测量误差对比如表2所示,由图7和表2可知滤波后焊缝偏差更加接近实际值,而且滤波后焊缝偏差的波动更小和平滑。试验验证了过程色噪声下卡尔曼滤波可以抑制系统噪声的影响,得到更精确的焊缝偏差参数。

图7 焊缝测量误差和滤波误差

表2 焊缝测量误差与滤波误差对比
6 结论
针对紧密对接的微间隙焊缝,磁光传感器可以摄取到包含焊缝信息的磁光图像。由磁光图像中提取出焊缝的位置信息并构成状态向量,构造系统状态方程与测量方程,在过程色噪声环境下应用卡尔曼滤波实现对焊缝位置状态的最优估计,减小系统噪声的干扰,为实时纠偏提供有效可靠的焊缝偏差信息,提高焊缝跟踪精度。
[1]徐国建,王虹,唱丽丽,等.激光焊接的特性[J].电焊机,2010,40(11):57-64.
[2]FANG Z J,XU D,TAN M.Visual seam tracking system for butt weld of thin plate[J].International Journal of Advanced Manufacturing Technology,2010(49):519-526.
[3]房加强,何建萍,王付鑫,等.视觉传感技术的应用研究与发展趋势[J].电焊机,2013,43(4):46-50.
[4]GAO X D,LiuYH,YOUDY.Detection of micro-weld joint by magneto-optical imaging[J].Optics&Laser Technology,2014(62):141-151.
[5]GAO X D,YOU D Y,SEIJI KATAYAMA.Seam Tracking MonitoringBasedonAdaptiveKalmanfilterEmbeddedElman Neural Network During High-power Fiber Laser Welding[J]. IEEE TRANSACTIONSONINDUSTRIALELECTRONICS,2012,59(11):4315-4325.
[6]刘益,高向东,张弛.卡尔曼滤波磁光成像计盒维数焊缝跟踪算法[J].电焊机,2015,45(1):132-136.
[7]高向东,仲训杲,游德勇,KATAYAMA Seiji.色噪声下卡尔曼滤波焊缝跟踪算法与试验研究[J].控制理论与应用,2011,28(7):931-935.
Kalman filtering algorithm with colored noise for seam tracking based on magneto-optical imaging
ZHANG Chi1,GAO Xiangdong1,XIAO Zhenlin2,CHEN Xiaohui2
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou 510006,China;2. Guangzhou Panyu Gofront Dyeing&Finishing Machinery Manufacturer Ltd.,Panyu 511400,China)
Seam tracking is prerequisite for laser welding quality.It is very important to accurately detect weld position and track the weld path in laser welding process.For micro butt-joint laser welding of two low carbon steel plates,an approach is investigated to estimate the seam offset by using the Kalman filtering optimal state estimation under the colored noise environment.A magnetooptical sensor based on the principle of Faraday magneto effect is applied to acquire the magneto-optical images of welds.The weld position parameters can be extracted by using image processing techniques.The state-equation based on the weld position parameters and the measurement-equation for the weld position is established.A Kalman filtering algorithm under colored noise environment is developed by augmenting the state vectors to obtain the optimal seam offset prediction under the condition of minimum mean square error through the optimal state estimation of weld position.This algorithm can reduce the system noises interference influence. Experiment results show that the accuracy of seam tracking can be improved significantly by Kalman filtering algorithm.
seam tracking;magneto-optical imaging;colored noise;kalman filtering
TG409
A
1001-2303(2015)08-0081-05
10.7512/j.issn.1001-2303.2015.08.17
2014-05-16;
2015-08-03
收稿日期:国家自然科学基金(51175095);广东省自然科学基金(10251009001000001);广东省学科建设科技创新项目(2013KJCX0063);广东省协同创新与平台环境建设专项资金项目(503149102077);广东省重大科技专项(2014B090921008);广州市科学研究专项(1563000554);佛山市科技创新专项资金项目(2014AG10015)
张驰(1990—),男,安徽人,在读硕士,主要从事焊接自动控制的研究工作。