某型电子节气门PID模糊控制系统仿真分析
2015-01-09侯丽春
侯丽春
(长春汽车工业高等专科学校)
某型电子节气门PID模糊控制系统仿真分析
侯丽春
(长春汽车工业高等专科学校)
在Matlab中建立电子节气门数学模型,联合模糊控制和PID控制器等搭建PID+前馈控制系统和模糊PID+前馈控制系统,对电子节气门目标大开度和较小开度两种情况的阶跃响应进行仿真分析。仿真结果表明,一定条件下模糊PID+前馈控制系统响应速度低于PID+前馈控制系统响应速度,但是模糊PID+前馈控制系统控制稳定,控制精度、准确度上要优于后者。
1 电子节气门结构模型
随着电子及控制技术的发展,电子节气门技术已经较广泛的应用在中高级发动机上。优良的参数控制算法是精确控制和系统反应的基础,其可以提高燃油经济性,降低排放污染[1],并可结合整车工况实现安全操控整车运行,是电子节气门技术不可缺少的研究内容。某型电子节气门控制系统(Electronic Throttle Control System, ETCS)主要由加速踏板、节气门、驱动电路、控制单元及相关传感器等部分构成,如图1所示。在MATLAB/Simu⁃link中建立电子节气门仿真模型,以进行控制算法研究。
2 PID控制系统及模糊控制系统搭建[2、3]
PID控制在应用中需先做出测量和目标比较再进行系统纠正,是一种应用最为广泛的控制方法,是按系统偏差比例、积分、微分线性组合进行控制输出量对控制对象进行控制[2]。节气门系统离散化方程为:
式中,n表示采样序号;u(n)表示第n次采样时刻PID控制器的输出值;e(n)表示第n次采样时刻系统设定值和实际值的差值;Kp为控制器比例常数;Ki=Kp/Ti为控制器的积分常数,Ti为积分时间;Kd=Kp·Td为控制器的微分系数,Td为微分时间;θt(n)为驾驶员需求的节气门开度;θ(n)为节气门的实际开度值。
由于PID在控制时变、耦合、非线性上以及结构不确定的系统控制时显示出其局限性,所以一般在控制复杂系统时采用PID和其它算法控制相结合的方式。
模糊控制系统是以模糊数学、模糊语言形式的知识表示,以模糊逻辑的规则推理为理论基础,采用计算机控制技术构成的一种具有反馈通道的闭环控制系统,其组成核心是具有智能性的模糊控制器。对其中模糊控制器中的参数设定TPS电压偏差E和偏差变化率EC的基本论域取为[-6,6],并将其分成7个模糊集合,分别是NL、NM、NS、ZO、PS、PM、PL。实际控制中电子节气门开度对应的传感器电压值偏差,故标定因子ke取1.2。TPS电压值偏差变化率V/s,标定因子kec取0.2。语言变量的隶属函数选择灵敏度较高、算法简单的三角形函数。在输出变量中,系统控制参数Kc的论域取[8,18],Ti的论域取[6,20],Td的论域取[6,16],并将其分成3个集合,分别是小(S),中(M),大(L)。其中控制系数Kc的实际输出范围为[8,18],所以Kc的标定因子kKc取1,Ti的实际输出范围为[0.006,0.020],所以Ti的标定因子kTi取0.001;Td的实际输出范围为[0.0008,0.0016],所以Td的标定因子kTd取0.0001。系统的Kc、Ti、Td的隶属函数均取为三角形函数,在MATLAB/Simulink中建立PID控制及模糊控制器的Simulink结构仿真模型,图2为E、EC的隶属度函数,图3~图5为Ti、Kc、Td隶属度函数曲线。
为了使ETCS获得较快的响应速度、较好的稳定性以及较小的超调量,制定不同偏差和偏差变化率下的PID控制参数整定原则[4、5]:
a.当|E|较大、EC较小或者为0时,为了保证系统具有良好的随动性,应迅速减小误差,可选取较大的Kc,同时为了避免较大超调量的出现,应选取中等的Ti和较小的Td。
b.若E·EC>0,说明系统正处于误差逐渐减小的状态。若|E|较大,可以选取较大的Kc、较小的Ti和中等的Td,这样可以使系统在短时间内减小偏差E,而且保证系统的稳态特性;若|E|较小,考虑到系统稳态特性要求,只要进行较小的PID控制,可以选取中等的Kc,较大的Ti和较小的Td。
c.若E·EC<0,说明系统正处于误差逐渐增大的状态。若|E|较大,则不仅需要尽快减小|E|,而且要尽快改变偏差变化的趋势,此时应该选取较大的Kc、较小的Ti和较小的Td;若|E|较小,只需要考虑改变偏差的变化趋势,可以选取中等的Kc、中等的Ti和较小的Td。
根据以上分析,建立PID控制参数Kc、Ti、Td的模糊控制规则表,如表1所示。
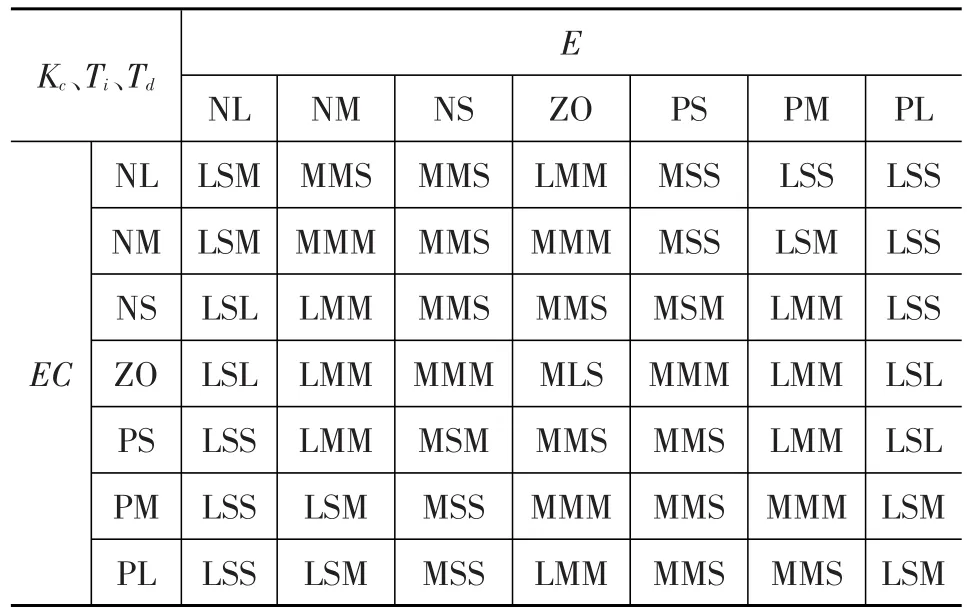
表1 模糊PID控制系统控制规则表
在MATLAB/Simulink中,获得输出曲面Kc、Ti、Td模糊后的三维立体图,分别如图6~图8所示。
3 阶跃响应Simulink仿真结果
在MATLAB/Simulink中建立模糊系统的仿真模型、前馈控制器仿真模型,将PID控制仿真模型与前馈控制器仿真模型两者相结合,或者将PID控制仿真模型与模糊控制器、前馈控制器3者结合,再连接电子节气门模型,整个ETCS综合Simulink仿真模型便搭建完成。模型搭建完成后,首先进行节气门阀片目标开度从6°阶跃变化到86°的ETCS仿真,其结果如图9所示。
从图9可以看出,在接收到阶跃信号的激励后,PID+前馈控制响应更为迅速,在受到激励70 ms后便可达到目标开度的90%(77.5°),在125 ms后便可达到稳定状态,但是在稳定周期内出现超调,超调量约为0.8°。而使用模糊PID+前馈控制响应较慢,在76 ms之后才能达到目标开度的90%,稳定时间和PID+前馈控制相同,均为125 ms,但稳定周期内无超调现象。
图10是节气门阀片目标开度从86°阶跃变化到6°的ETCS仿真结果。
从图10可以看出,采用PID+前馈控制的电子节气门响应更为迅速,受到激励后55 ms便可达到节气门目标开度的90%(14°),稳定周期约为110 ms,但在稳定周期内出现超调,超调量约为3°。采用模糊PID+前馈控制的电子节气门响应速度较慢,在70 ms后达到目标开度的90%,稳定周期同样为110 ms,周期内无超调现象。
再次进行小角度(7°-11°)仿真分析,其结果如图11所示。
从图11可以看出,采用PID+前馈控制的电子节气门响应速度较快,在16 ms后便可达到目标开度,在周期内出现超调,超调量约为1.6°,整个稳定周期约为65 ms。采用模糊PID+前馈控制的电子节气门响应速度较慢,在30 ms后达到目标开度,在周期内也出现超调,超调量较小,约为0.1°,整个稳定周期约为65 ms。
电子节气门开度从11°变化到7°时,两种控制方式的曲线变化如图12所示。
从图12可以看出,采用PID+前馈控制的电子节气门响应速度较快,到达目标开度90%(7.4°)的时间约为18 ms,在25 ms后到达目标开度,之后出现超调,超调量略小于0.2°,整个稳定周期约为70 ms。采用模糊PID+前馈控制的电子节气门的相应速度较慢,到达目标开度90%的时间约为22 ms,在30 ms后到达目标开度,也出现了超调,超调量较小约为0.08°,整个稳定周期约为70 ms。
4 结束语
a.无论是在电子节气门目标开度变化较大还是变化较小的情况下,采用PID+前馈控制方式的响应速度都比采用模糊PID+前馈控制的方式快,在电子节气门目标开度变化较大的情况下表现的更加明显。
b.无论是在电子节气门目标开度变化较大还是变化较小的情况下,采用模糊PID+前馈控制方式的超调量均要小于采用PID+前馈控制方式,在目标开度较大的情况下,采用模糊PID+前馈控制的超调量甚至为0。
c.电子节气门采用PID+前馈控制方式和采用模糊PID+前馈控制方式,其响应的稳定周期大致相同。
d.在电子节气门目标开度变化量相同的情况下,从开度较小变化到开度较大的响应时间要比从开度较大到开度较小的响应时间长。
1 林学东,王霆.车用发动机电子控制技术.北京:机械工业出版社,2008.
2 杨振东.基于模糊PID电子节气门控制系统的研究与开发:[学位论文].长沙:湖南大学,2008.
3 席爱民.模糊控制技术.西安:西安电子科技大学出版社,2008.
4 石辛民.模糊控制及其MATLAB仿真.北京:清华大学出版社,2008.
5 毛亚峰.基于MATLAB/Simulink的电子节气门控制系统仿真:[学位论文].西安:长安大学,2012.
(责任编辑晨 曦)
修改稿收到日期为2015年8月1日。
Simulative Analysis of an Electronic Throttle PID Fuzzy Control System
Hou Lichun
(Changchun Automotive Industry Institute)
A mathematics electronic throttle model is built in Matlab,with joint fuzzy control and PID controller, etc.,PID+feedforward control system and fuzzy PID+feedforward control system are built to simulate and analyze the step response of wide-open-throttle and narrow-open-throttle.The results of simulation show that,under certain conditions, response rate of fuzzy PID+feedforward control system is slower than that of PID+feedforward control system,however,the former control stably with better control accuracy and precision than the later.
Electronic throttle,PID+Feedforward control system,Fuzzy PID+Feedforward control system
电子节气门 PID+前馈控制系统 模糊PID+前馈控制系统
U464
A
1000-3703(2015)11-0044-03
