基于虚拟仪器的动车图像条纹噪声消除算法
2015-01-08王慧聪杨世凤
于 涛,王慧聪,杨世凤
(天津科技大学电子信息与自动化学院,天津 300222)
车号在铁路安全和管理系统中有十分重要的作用[1].通过图像识别技术在列车管理系统中获取车号,能够有效地解决人工抄写耗费大量人力以及射频辐射技术所使用装置较昂贵的问题.为图像识别过程提供清晰、完整的图像是获取车号过程的基本要求.由于动车的运动速度在10~150,km/h,要获取动车图像,必须采用线阵CCD 相机对动车进行线阵扫描再进行图像拼接,以解决动车速度过快的问题.反复扫描物体成像,会导致图像的部分重叠扫描,加之铁路沿线复杂的电气设备及电弓与高压线的接触摩擦产生强大的电磁干扰,这使得采集的图像中出现强烈的条纹噪声[2].这些噪声的存在掩盖了图像中的部分重要信息,图像的质量大幅度降低,对从图像中提取有用信息造成了障碍和不利的影响.
条纹噪声是一种周期性重复出现于图像中的噪声.去除图像中条纹噪声的典型处理方法分为:针对图像灰度值特征的匹配方法,如直方图匹配、矩匹配法;通过傅里叶变换在频域内去除周期性噪声的频率成分,如低通滤波、带阻滤波[3].传统的去除条纹噪声的方法具有普遍性,但对于动车图像这种黑白分明的图像,黑白变化区域与条纹噪声在频域内都表现为高频部分,普通的带阻滤波会使得动车图像中车号文字的边缘部分模糊化严重,矩匹配法对于动车图像这种黑白分部区域化的灰度图像空间分布产生畸变,导致图像中车号部分边缘信息丢失[4].
每幅动车图像之间差异较小,且主要在车号部分.针对这种图像信息变化微小的特征采用一种新的滤波方法,并利用LabVIEW 作为系统软件开发平台,结合VDM(Vision Develop Module)模块,通过对图像在频率域和空间域中结合处理的方法去除动车图像中车号部分的条纹噪声.
1 去噪算法与应用效果
对含有条纹噪声的图像的去噪算法流程如图1所示.

图1 去噪算法流程Fig.1 Noise reduction algorithm flow chart
在频率域中,对含有条纹噪声的图像进行滤波可以表示

式中:F (u,v)为图像经过傅里叶变换的矩阵;H (u,v)为频域滤波器;G (u,v)为去噪后的频谱矩阵[6].频域滤波器原型定义为

式中:D 为整个图像的频域空间;D0频域空间中条带成分子空间.在频域内对图像进行滤波的关键在于如何准确的确定D0,这就需要将图像从空间域变换到频率域,并进行一系列处理.
1.1 将噪声图像和正常图像从空间域变换到频率域
静止的数字图像可以看成二维数据阵列.将一幅像素大小为M ×N 的含噪声图像 f1(x, y) 和原始图像 f2(x,y) 进行二维快速傅里叶变换,变换表达式为

变换后得到两幅图像的频谱图 F1(u,v)、F2(u,v) .频谱图中的每个点对应着空间域的图像信息的变化.图2 和图3 分别为含噪声图像和正常图像及其相应的频谱图.
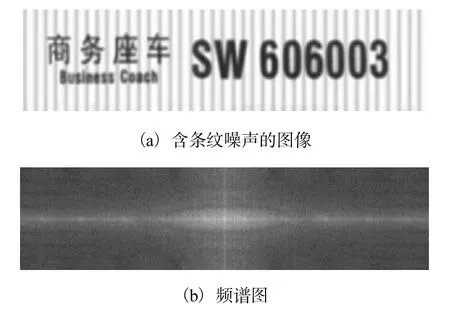
图2 含条纹噪声的图像及其频谱图Fig.2 Image of strip noise and its spectrogram

图3 正常图像及其频谱图Fig.3 Normal image and its spectrogram
1.2 对频谱图进行二值化和逻辑处理
对比 F1(u,v) 和F2(u,v),发现差异集中于高频处.但由于车号的边缘部分在频域中同样表现为高频,因此需要在频谱图的高频区域进一步定位差异部分,以防止在频域滤波过程中将车号边缘模糊化.首先将两幅图像分别进行二值化处理.二值化的阈值选取采用最大类间方差法[5].设图像有M 个灰度值,取值范围为0~(M-1),在此范围内选取灰度值t,将图像分成G0和G1两组,G0包含像素的灰度值在0~t 范围内,G1包含像素的灰度值在(t+1)~(M-1)范围内,N 为图像像素总数,ni表示灰度值为i 的像素个数.则每一个灰度值出现的概率为

G0和G1两组像素所占百分比为

两组的平均灰度值为

图像的总平均灰度

两组平均灰度值的类间方差

阈值T 将整幅图像分成前景和背景两部分,当两类的类间方差最大时,前景和背景的差别最大,二值化效果最好.所以最佳阈值为式(4).

频谱图 F1(u,v) 与 F2(u ,v) 选取相同阈值,以保证最终区域确定的准确性.二值化后得到的图像矩阵分别为 f3(x, y) 和 f4(x,y),并对其进行如下处理:f3(x,y)&f4(x,y)⊕f4(x,y),得到阻频带区域如图4(白色区域)所示.

图4 阻频带区域Fig.4 Damping band
1.3 多样本处理
由于不同动车图像中的文字不同,并且采集过程中环境条件略有差异,因此得到的频谱图也存在一定的差异性.为解决这一问题,随机选取了100 幅通过CCD 线阵相机在现场采集的不同车次和车厢的图像,并截取像素大小为774×195 的车号部分,分别进行1.1、1.2 中所述操作后,对100 幅图像的二值化结果进行累加,将白色区域重复率大于50 的部分进行保留,去除剩余部分.

经多样本处理后的图像如图5 所示,将图中的阻频区域对称的划分为6 个矩形区域.

图5 多样本处理后的阻频带区域Fig.5 Damping band after multiple-sample processing
1.4 巴特沃斯带阻滤波器进行平滑滤波
将图5 所示的6 个区域作为阻频带,选用带阻滤波器进行滤除.采用理想的带阻滤波器将致使图像的频率变化过快,产生较严重的模糊和振铃现象,虽然某种程度上达到了去除噪声的效果,但是图像有用信息也发生了变化.为了解决这一问题,采用巴特沃斯带阻滤波器进行滤波操作.巴特沃斯滤波器的特点是在通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零[6].
n 阶Butterworth 带阻滤波器的传递函数为

式中:W 是阻频带的宽度;R0是阻频带的中心半径.(ui,vi)为阻频带的区域中心,且

由于得到的巴特沃斯滤波器的阻频带是6 个条形区域,因此在选用滤波器时以条形区域的长为直径,将巴特沃斯带阻滤波器的中心分别转移至矩形区域中心(ui,vi),i=1,2,3,4,5,6.并且,由于2 阶巴特沃斯滤波器是理想滤波器的尖锐和高斯型滤波器的完全平滑的一种过渡,是有效滤波和可接受的振铃特性之间的折中,因此本文选取n=2.
在各区域中均利用式(6)求取传递函数 hi(u,v),i=1,2,3,4,5,6.将各 hi(u ,v)进行整合,得到式(8)所示的最终传递函数 H (u,v) .

改进带阻滤波器的三维透视图如图6 所示.
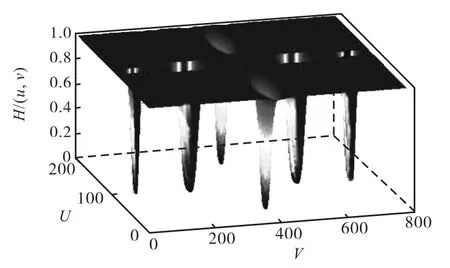
图6 改进带阻滤波器的三维透视图Fig.6 3D perspective drawing of the improved band rejection filter
1.5 反傅里叶变换
运用改进带阻滤波器进行频域滤波后,根据式(1)得到 G (u ,v),进行反傅里叶变换,得到处理后的空域内的图像 f (x, y) .反傅里叶变换公式[10]为

1.6 图像增强处理
经过频域处理后的图像亮度降低,对比度下降,同时部分图像也伴随着字符边缘虚化的问题.采用VDM 图像处理模块中的IMAQ GrayMorphology.VI函数对图像进行锐化处理,以解决字符边缘虚化问题.利用IMAQ BCGLookup.VI 函数进行图像亮度和对比度的调节,并进行伽马校正.在确定IMAQ BCGLookup.VI 函数中的亮度、对比度和伽马参数的值时,利用NI 公司开发的VISION ASSISTANT 能够动态地更改函数中的亮度、对比度和伽马值,以找到效果最好的参数值[7].图像增强处理的最终程序框图及选取的相应参数见图7.

图7 图像增强程序框图Fig.7 Block diagram of image enhancement
通过对图像增强处理后,最终达到了去除条纹噪声的效果,得到了较为理想的图像.图8 给出了进行图像增强前后的效果对比.

图8 图像增强处理前后的效果对比Fig.8 Results comparison before and after image enhancement
2 去噪方法评价
在石家庄动车运用所利用线阵CCD 相机对动车图像进行了采集.随机选取30 组图像,并截取大小为774 像素×19 像素5 的车号部分,分别用本方法和普通带阻滤波方法、矩匹配法对图像中的条纹噪声进行去除,并运用求取均方误差(MSE)和峰值信噪比(PSNR)两种方法分别评价去噪效果[8],求取其平均值并进行对比,结果见表1.其中,均方误差和峰值信噪比的计算公式为


表1 去噪效果评价Tab.1 Evaluation of de-noising effectiveness
通过对比可见,本文的去除条纹噪声的效果好于普通带阻滤波和矩匹配法.
3 结语
通过图像识别技术获取动车车号是一种常用途径,而为图像识别过程提供清晰、完整的图像是提高图像识别率的基本要求.本文针对动车车号图像的特点采用了针对性较强的去除条纹噪声算法对车号图像进行了去噪和图像增强的处理,为进一步的车号识别提供了技术保障.该方法已经成功应用在石家庄动车运用所的车号图像采集系统中,对图像去噪处理的效果明显.但是,该方法存在针对性较强的缺点,并不适用于所有场合的图像条纹去噪.
[1]马云岭,陈雷,吴月东.铁路货车车号管理的发展及其应用信息技术的研究[J].铁道车辆,2006,44(4):29-34.
[2]修吉宏,翟林培,刘红.CCD 图像条带噪声消除方法[J].电子器件,2005,28(4):719-721,725.
[3]徐花艳,孙瑞宁.基于频域的图像条纹噪声消除方法[J].硅谷,2012(6):194.
[4]孙颖,张志佳.基于频域滤波的自适应条带噪声去除算法[J].仪表技术与传感器,2006(2):57-59.
[5]张引.基于空间分布的最大类间方差牌照图像二值化算法[J].浙江大学学报:工学版,2001,35(3):272-275,280.
[6]刘岳巍.修正巴特沃斯函数快速图像降噪方法[J].兰州大学学报:自然科学版,2014,50(1):122-127.
[7]李扣生.基于虚拟仪器的电路板图像识别系统研究与实现[D].上海:上海交通大学,2010.
[8]李晓晶.图像质量评价与图像增强技术研究[D].南京:南京理工大学,2008.