变频调谐质量阻尼器在线控制转子振动的应用研究
2015-01-07黄秀金何立东
黄秀金,何立东,邢 健,王 锎
(北京化工大学机电工程学院,北京100029)
变频调谐质量阻尼器在线控制转子振动的应用研究
黄秀金,何立东,邢 健,王 锎
(北京化工大学机电工程学院,北京100029)
提出研究一种适用于旋转机械频率可在线连续调节的笼式调谐质量阻尼器(Tuned Mass Damper,TMD),通过在线改变其悬臂杆有效长度可连续改变TMD的刚度,从而实现TMD频率的调节。该笼式TMD具有结构紧凑、刚度调整范围大等优点。建立转子-TMD的有限元模型,设计基于转速的分段控制策略实现对该TMD的频率调节控制,仿真对比分析TMD在频率可控及不可控情况下对柔性转子过临界及在工作转速下的不平衡振动抑制效果,并设计相应的实验平台进行验证分析。仿真及实验结果均表明:基于转速的分段控制策略能实现在线控制TMD频率调节,有效控制柔性转子过临界及工作转速的不平衡振动,相对于被动型频率不可调TMD更具有优势,其减振效果明显,降幅高达90.8%。
转子动力学;笼式调谐质量阻尼器;分段控制;减振
引 言
旋转机械如离心风机,即使做了初始平衡但运行中因介质造成轮盘磨损或结垢会产生较大的不平衡振动。特别是对于某些工作转速在一阶临界转速以上的高速转子,在启停车阶段必须经过临界转速,此时转子会产生强烈共振。传统的做法需要在停机的情况下基于模态平衡法和影响系数法进行动平衡处理[1-4],不仅影响生产的正常进行,也造成了人力和经济的损失。如今存在各种转子不平衡的减振方法。其中转子的自动平衡技术可以在不停机的情况下对转子进行在线平衡,因此具有重要的应用意义[5-6]。目前常用的在线 自动平衡 技术 主要 有 电磁式自动平衡和液 压式自动 平衡[7-8]。电 磁型 主 动平衡装置结构复杂、造价贵,且受平衡能力及工作条件的限制,多应用在要求平衡能力小的小型转子上,如磨床等领域[9-10]。液压式自 动平 衡 技 术 是一种能够提供足够大平衡能力且不受外界工作环境影响的在线自动平衡技术。国外该技术已在磨床领域、石化和电力行业的大型旋转机械领域得到广泛应用,国内 仍 处于 科 研阶 段[11-14]。
调谐质量阻尼器由于结构简单、减振效果好已广泛用于控制结构振动,尤其是高楼、桥梁建筑的风载或地震[15],一般 由质量 块、弹 簧和阻 尼器组 成。由于TMD对调谐频率的敏感性,近期许多学者对其有效频带拓宽方法进行了研究,出现了各种半主动和主动调谐质量阻尼器以便调谐其目标频率[16]。对TMD用于控制转子不平衡振动研究比较少。曾有研究通过被动TMD增加机床结构的阻尼,例如在铣床主轴、磨床主轴、镗杆等上减少刀杆的颤振[17-18]。刘耀宗等采用动力吸振器有效抑制轴系各阶轴向共振频率附近的轴-壳共振,而对其他频段的轴壳轴向共振则效果不佳[19]。John Arrigan等在风力发动机叶片上通过半主动调谐质量阻尼器成功控 制 叶片 拍 振[20]。
针对以上平衡技术的缺陷,本文设计研究了一种半主动连续变频笼式结构调谐质量阻尼器在线控制转子不平衡振动。先探讨半主动连续调频笼式调谐质量阻尼器结构特性,并设计基于转速的分段控制策略,结合有限元和转子动力学理论对TMD-转子模型进行数值分析此频率可调TMD控制柔性转子过临界及在工作转速下的不平衡振动特性,并设计了相应的实验进行验证。从而为该技术在旋转机械领域的推广应用奠定了基础。
1 连续调频笼式TMD结构特性研究
1.1 阻尼器结构设计
该半主动连续调频笼式TMD结构如图1所示,由轴承、辅助环、悬臂杆笼条及环形辅助质量块组成。轴承安装在转轴上不作为转子系统的支撑,仅起到传递振动能量的作用;辅助环套在轴承外圈,起辅助连接作用;笼条采用5根圆形截面悬臂杆和1根同直径的丝杆,连接辅助环和环形质量块,主要提供TMD的刚度;环形质量块主要提供TMD的质量。丝杆一端与步进电机连接,另一端与螺母连接,螺母与质量环固接,通过控制步进电机带动螺母丝杆及质量环在丝杆上移动,以改变悬臂杆有效长度可实现在线调节 TMD刚度。转子的振动传递到与之连接的轴承和卡箍,通过TMD的反共振作用转移到TMD中,从而达到减振的作用。吸振器工作过程辅助环是固定的,整个吸振器不随转轴旋转。TMD子系统的刚度k=a,I为悬臂杆截面二次矩,E为弹性模量,l为悬臂杆弹簧有效长度,a为一常数。此阻尼器最大特点是:①笼式结构;②通过在线改变悬臂杆有效长度l可连续改变子系统的刚度,从而实现TMD频率连续可调,使TMD子系统的频率始终与转子主系统频率保持一致,对解决需要在线控制柔性转子过临界及工作转速下振动具有很大优势。

图1 笼式调谐质量阻尼器结构示意图Fig.1 Structure diagram of the cage tuned mass damper
1.2 阻尼器刚度的数值与实验分析
本文根据实验室现有的转子系统参数设计了一个适合此转子系统用的笼式TMD,其转子的参数见表1。根据定点理论[21-22],初选以质量比μ=0.2为参数设计TMD,最终选取TMD质量m=μM= 0.35 kg,悬臂杆直径d=1.95 mm。研究此动力吸振器的刚度k与有效长度l的数学模型关系。
在确定了笼式TMD的结构、材料之后,采用ANSYS有限元软件对笼式TMD进行模态分析,通过设置TMD的悬臂杆不同的有效长度l,分别计算笼式TMD的模态,并提取计算结果的一阶固有频率,其一阶振型如图2所示。

表1 仿真转子基本结构参数Tab.1 Parameters of the simulation rotor structure
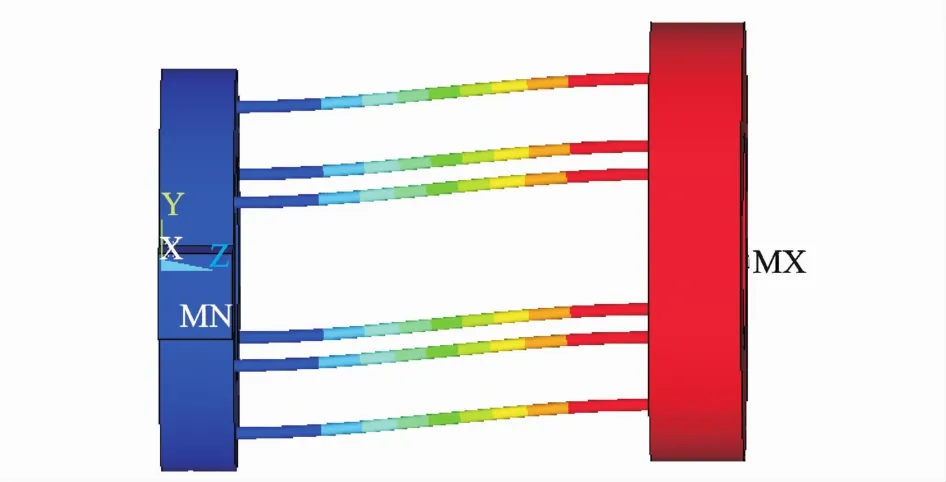
图2 笼式TMD的一阶振型Fig.2 The first order mode of cage TMD
图3为对该笼式TMD进行试验分析的实验测试系统。将笼式TMD卡紧在一个与激振器固接的管道上,信号发生器给激振器一个正弦扫频信号,通过传感器将管道的输出信号输入到测振分析仪,通过分析其频响函数得到笼式TMD在不同悬臂杆长度l下的固有模态。
数值仿真与测试结果如表2所示。图4为此笼式TMD刚度k与有效长度l实测值与仿真值的比较。

图3 笼式TMD测试实验台Fig.3 Cage TMD test bench
通过k=(2πf)2·m,并用最小二乘法拟合得到此笼式TMD刚度k与有效长度l关系


表2 笼式TMD频率测试结果Tab.2 Frequencies test results of cage TMD

图4 笼式TMD刚度k与有效长度l实测值与仿真值比较Fig.4 Comparison between the measured values and the fitting values for stiffness k and the effective length l of the cage TMD
2 笼式TMD控制转子振动理论分析
2.1 笼式TMD控制转子振动机理
转子结构如图5所示,由两滑动轴承支撑。将转轴及转子系统离散为多自由度系统,根据转子动力学理论,转子在不平衡等外扰力作用下的动力学方 程 为[1]

式中M,C,K分别为转子系统的质量矩阵、阻尼矩阵(包括陀螺力矩)和刚度矩阵;F为转子的外激振力矩阵;¨x,x,x分别为转子主系统的加速度、速度和位移矩阵。在转轴合适位置安装TMD后,设TMD作用在转子上反馈回来的控制力为Fd,则作用在运动方程上的力为外激振力与控制力之差。因此含有TMD的转子轴系的运动方程为

由质量为m、刚度为k、阻尼为c的TMD产生于转子的控制力Fd可表示为

式中ω为激振力频率。
因此只要合理设计阻尼器的固有频率与所要控制的激振力频率ω相同或接近,即可有效抵消外扰力的影响,从而降低转子的振动。

图5 转子有限元结构Fig.5 The finite element structure of the rotor
2.2 TMD控制转子不平衡振动的仿真分析
2.2.1 被动频率不可调TMD控制转子振动分析
由于不平衡,柔性转子在过临界和在工作转速情况下会产生较大振动。现将针对转子过临界及在工作转速下分别设计一个被动型TMD控制转子的不平衡振动。
此转子系统的参数见表1,转轴被离散为11个Timoshenko梁单元。
计算得到转子的一阶临界转速为2 075 r/min,取转子工作转速为2 700 r/min。则设计的无阻尼TMD参数为:质量比μ=0.2,TMD的质量为m=μM=0.35 kg,阻尼c=0。临界转速下:TMD的刚度为16.526 N/mm;对应转子工作转速下TMD的刚度为27.55 N/mm。在图5转子模型节点6的0°相位加不平衡量0.15 kg·mm。选节点3的稳态响应作为参考,根据以上参数理论计算转子在转速n=1 000~4 000 r/min的无TMD控制、TMD控制转子过临界(2 075 r/min)、TMD控制转子工作转速(2 700 r/min)的稳态响应,其计算结果如图6所示。
由图6可知,被动频率不可调TMD单独控制转子过临界或工作转速振动时,当TMD频率与转子主振系频率相一致时,转子的振动均大大降低,但同时会引起主系统两共振峰。而且,这种被动型TMD由于频率不可调,只能对某单一频率激振力的振动起作用,即控制临界转速的TMD只能对转子过临界有减振效果,控制工作转速下的TMD只能对工作转速下的振动起减振作用。
2.2.2 频率可调TMD控制转子不平衡振动
为解决上述问题,设计基于转速的分段控制策略,即在转子通过临界前某设定转速下调节TMD频率使之与转子某阶固有频率相一致,待转子平稳过临界后再设定在某转速让TMD不起作用,待转子升到工作转速前某转速将TMD频率调至与恒定工作转速相对应的频率控制转子工作转速下的振动,其控制原理如图7所示。因此采用基于转速的分段控制策略的TMD控制转子系统启-停车过程过临界及在工作转速的振动,将具有很大的优势。让TMD在需要起作用时工作,这样有利于避免TMD失调问题。

图6 TMD控制转子过临界及工作转速升速振动响应Fig.6 Comparison of the speed-up bode charts of TMD respectively controlling rotor unbalance vibration at critical speed and the working speed

图7 基于转速的分段控制原理图Fig.7 Diagram of segmentation control principle based on the speed
以下针对此转子系统,结合基于转子转速的分段控制策略模拟笼式TMD在线控制柔性转子通过一阶临界及工作转速下的不平衡振动。由图6可知TMD控制转子过临界的有效频带为1 850~2 400 r/min,控制工作转速2 700 r/min的有效频带为1 950~3 000 r/min。由此制定的控制流程,控制TMD刚度,先设置一个高频TMD,这里选为57 Hz,以1 900 r/min和2 350 r/min作为TMD起作用的控制转速,其流程如图8所示。
按此控制流程得到TMD在线控制柔性转子系统过临界——工作转速的升速振动响应曲线图如图9所示。由图可知通过此控制方法可以很好抑制转子在临界区振动及工作转速下的振动,同时也解决了加TMD后带来的新峰值。
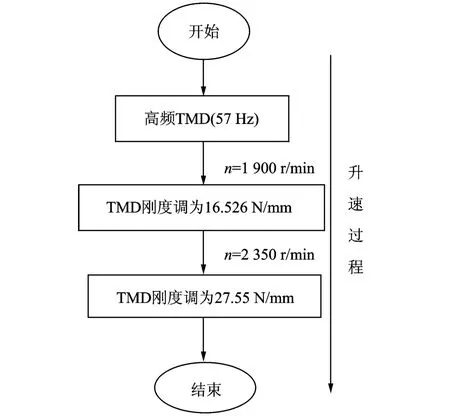
图8 TMD基于转速的分段控制流程图Fig.8 Flow chart of TMD segmentation control based on speed

图9 可控TMD控制转子振动响应曲线图Fig.9 Speed-up plot of TMD controlling rotor unbalance vibration
3 实验验证
依据仿真的转子模型,搭建了在线连续调频笼式TMD基于转速分段控制策略控制转子不平衡振动的实验台,如图10所示。该实验平台通过光电测速传感器采集转速,两电涡流传感器分别采集测点处水平(X)和竖直(Y)方向轴振径向位移,变频器控制直流电机的转速。
实验过程:先采集转子在不平衡状态下不加TMD运行的升速振动响应曲线图;再分析笼式TMD在频率不可调的情况下分别控制转子过临界和在工作转速下的不平衡振动的特性;最后安装频率可调笼式TMD按图8的仿真流程基于转速分段控制策略分别调节TMD刚度对应控制临界转速及工作转速下的振动。实验中先按式(1)调节TMD悬臂杆长度将TMD频率调至到57 Hz(对应长度l=56 mm),通过调节变频器给转子缓慢升速,当通过光电传感器检测到转速为1 900 r/min,编制好的控制程序发出相应的脉冲信号进入步进电机驱动器,带动步进电机运转。步进电机按照给定的脉冲数准确带动与质量块连接的丝杆移动到相应的位移,以调节TMD悬臂杆长度l将其频率调至与转子一阶临界相对应,如图11中的la(la=88 mm)位置;当升速到2 350 r/min时,控制器按设置好的信号控制步进电机带动丝杆再次移动到相应的位移,在线调节笼式TMD的悬臂杆有效长度,从而调节TMD控制工作转速所对应的频率,如图11的lb(lb=74.5 mm)位置。

图10 实验台示意图Fig.10 Schematic of the test bench

图11 TMD频率调节过程Fig.11 Adjustment process of TMD frequency
图12(a)和(b)是被动不可控笼式TMD分别单独控制转子过临界及工作转速下的不平衡振动测点X和Y方向在转速范围1 000~3 000 r/min的升速振动响应曲线对比图。由图12可知,此转子实测一阶临界约为2 202 r/min,计算得到的2 075 r/min的临界与实测误差为5.8%。图12(a)和(b)的实验现象与仿真结果相一致,即采用被动不可控的TMD单独控制柔性转子的临界及工作转速的不平衡振动,只能在相应的频率下起到很好的减振效果,但同时会引起两较大的共振峰,这是得不偿失的。
图13是可在线连续调频笼式TMD在基于转速的分段控制策略控制转子过临界-工作转速的不平衡振动的升速振动响应曲线图。

图13数据表明通过对笼式TMD实行基于转速的在线调频控制,可以有效地控制柔性转子过临界及在工作转速下的不平衡振动,在转速1 900~2 700 r/min均具有明显的减振效果,减振频带较宽。其中当TMD固有频率接近转子主激振力频率时,减振效果最为明显,当TMD频率远离激振力频率时,减振效果有所降低;同时,通过对TMD的适时控制,还避免了被动型TMD单独作用所带来的两共振峰。表3是转子系统X和Y方向振动位移峰峰值在施加笼式TMD控制前后对临界及工作转速的减振效果,分别达到90.8%,84.9%,72.8%,57.0%的降幅。

图13 可控TMD控制转子振动响应对比图Fig.13 Contrast of speed-up plots of TMD controlling rotor unbalanced vibration

表3 TMD控制转子临界和工作转速振动的减振效果Tab.3 Damping effect of TMD controlling the rotor vibration at critical speed and operating speed
4 结 论
本文研究设计一种适用于旋转机械的可在线连续调频的笼式TMD,通过在线改变其悬臂杆有效长度可连续改变子系统的刚度,从而实现TMD频率连续可调,研究其刚度变化与有效长度的数学模型,并设计基于转速的分段控制策略从数值仿真和实验分析角度对比研究此笼式TMD在频率可控及不可控情况下,控制柔性转子过临界-工作转速下的不平衡振动特性,得到如下结论:
(1)此连续调频笼式TMD可在线有效同时控制柔性转子过临界及工作转速的不平衡振动,其减振效果明显,降幅高达90.8%;
(2)基于转速的分段控制策略可实现TMD的适时控制,避免TMD在抑制主系统振动同时所带来的共振负作用,相比被动型不可控TMD更具有优势;
(3)此笼式TMD能实现不停车在线连续调频,且具有较宽的减振频带。
[1] 钟一谔,何衍宗,王正,等.转子动力学[M].北京:清华大学出版社,1987. Zhong Yi′e,He Yanzong,Wang Zheng,et al.Rotor Dynamics[M].Beijing:Tsinghua University Press,1987.
[2] 黄金平,任兴民,邓旺群.利用升速响应振幅进行柔性转子的模态平衡[J].机械工程学报,2010,46(5):55—62. Huang Jinping,Ren Xingmin,Deng Wangqun.Novel modal balancing of flexible rotor by using the run-up amplitude[J].Journal of Mechanical Engineering,2010,46(5):55—62.
[3] Bishop R E D,Gladwell G M L.The vibration and balancing of an unbalance flexible rotor[J].Journal of Mechanical Engineering for Science,1959,(1):66—77.
[4] Lund J W,Tonnesen J.Analyses and experiments on multiplane balancing of a flexible rotor[J].American Society of Mechanical Engineers Journal of Engineering for Industry,1972,94(5):233—242.
[5] Branislav Hredzak,Guoxiao Guo.New electromechanical balancing device for active imbalance compensation [J].Journal of Sound and Vibration,2006,294(45):737—751.
[6] Sève F,Andrianoely MA,Berlioz,A,et al.Balancing of machinery with a flexible variable-speed rotor[J]. Journal of Sound and Vibration,2003,264(2):287—302.
[7] 汪振威,何立东,苏奕儒.液压自动平衡技术在风机转子上的应用[J].中国电机工程学报,2009,29(5):86—90. WANG Zhen-wei,HE Li-dong,SU Yi-ru.Application of hydraulic automatic balancing technology on a fan rotor[J].Proceedings of the CSEE,2009,29(5):86—90.
[8] 苏奕儒,何立东,汪振威,等.单盘刚性转子双平面液压主动平衡技术研究[J].中国电机工程学报,2009,29 (5):86—90. SU Yi-ru,HE Li-dong,WANG Zhen-wei,et al. Study on dual-plane active hydraulic balancing technology for single-disk tigid rotor system[J].Proceedings of the CSEE,2009,29(5):86—90.
[9] Gosiewski Z.Automatic balancing of flexible rotors. Part I:synthesis of system[J].Journal of Sound and Vibration,1987,114(1):103—119.
[10]Zhou S,Shi J.Optimal one-plane active balancing of a rigid rotor during acceleration[J].Journal of Sound and Vibration,2002,249(1):196—205.
[11]Shiyu Zhou,Jianjun Shi.Active balancing and vibration control of rotating machinery:A Survey[J].The Shock and Vibration Digest,2001,33(5):361—371.
[12]Palazzolo A B,Jagannathan S,Kascak A D.Hybridactive vibration control of rotor bearing system using piezoelectric actuators[J].Transactions of ASME,Journal of Vibration and Acoustics,1993,115(4):111—119.
[13]Moon J D,Kim B S,Lee S H.Development of the active balancing device for high-speed spindle system using influence coefficients[J].International Journal of Machine Tools and Manufacture,2006,46(9):978—987.
[14]陈庆凯,李京业,赵健,等.大型离心通风机转子的现场找平衡[J].冶金动力,2001,(5):10—15. Chen Qingkai,Li Jingye,Zhao Jian,et al.Rotor balance in-situ of large centrifugal ventilator[J].Metallurgy Power,2001,(5):10—15.
[15]Pourzeynalia S,Salimib S,Eimani Kalesarb H.Robust multi-objective optimization design of TMD control device to reduce tall building responses against earthquake excitations using genetic algorithms[J]. Scientia Iranica Transactions A:Civil Engineering,2013,20(2):207—221.
[16]Owjia H R,A Hossain Nezhad Shirazi,Hooshmand H Sarvestani.A comparison between a new semi-active tuned mass damper and an active tuned mass damper[J].Procedia Engineering,2011,(14):2 779—2 787
[17]Altintas1 Y,Weck M.Chatter stability of metal cutting and grinding[J].CIRP Annals-Manufacturing Technology,2004,53(2):619—642.
[18]Yang Y,Munoa J,Altintas Y.Optimization of multiple tuned mass dampers to suppress machine tool chatter[J].International Journal of Machine Tools&Manufacture,2010,50(9):834—842.
[19]刘耀宗,王宁,孟浩,等.基于动力吸振器的潜艇推进轴系轴向减振研究[J].振动与冲击,2009,28(5):184—187. Liu YZ,WANG N,MENG H,et al.Design of dynamic vibration absorbers to reduce axial vibration of propelling shafts of submarines[J].Journal of Vibration and Shock,2009,28(5):184—187.
[20]John Arrigan,Vikram Pakrashi,Biswajit Basu,et al. Control of flapwise vibrations in wind turbine blades using semi-active tuned mass dampers[J].Structural Control and Health Monitoring,2011,18(8):840—851.
[21]背户一登.动力吸振器及其应用[M].北京:机械工业出版社,2013:25—50. Kazuto SETO.Dynamic Vibration Absorber and Its Application[M].Beijing:Mechanical Industry Press,2013:25—50.
[22]Cheung Y L,Wong W O.H-infinity optimization of a variant design of the dynamic vibration absorber-Revisited and new results[J].Journal of Sound and Vibration,2011,330(16):3 901—3 912.
Applied research on on-line control of rotor vibration with variable frequency tuned mass damper
HUANG Xiu-jin,HE Li-dong,XING Jian,WANG Kai
(School of Mechanical and Electrical Engineering,Beijing University of Chemical Technology,Beijing 100029,China)
An innovative design for an on-line cage-type tuned mass damper(TMD)whose frequency is continuously adjustable and which is suitable for rotating machinery is proposed.The stiffness of the TMD can be changed online continuously by changing its effective length of cantilever rod,so as to realize continuous frequency modulation of the TMD.The cage-type TMD has advantages of compact structure,large range of adjustable stiffness and so on.The finite element model of the rotor-TMD was built,and the sectional control strategy based on velocity was designed for adjusting the cage-type TMD frequency.The numerical simulation comparative analysis of the TMD on the case of its frequencies adjustable and non-adjustable controlling the flexible rotor unbalance vibration when going through critical speed and at the working speed was conducted.And the corresponding experimental platform was designed for validation.The simulation and experimental results show that sectional control strategy based on velocity can yield online timely control the frequency modulation of TMD,and control the flexible rotor unbalanced vibration when going through critical speed and at the working speed effectively,that has more advantages compared with the passive TMD.The vibration reduction is very effective,which is as far as up to 90.8%.
dynamics of rotor;cage-type tuned mass damper;subsection control;vibration reduction
O347.6
A
1004-4523(2015)05-0778-07
10.16385/j.cnki.issn.1004-4523.2015.05.013
黄秀金(1989—),女,硕士研究生。电话:18100209014;E-mail:xiatian06@126.com
2014-08-27;
2015-05-15
国家重点基础研究发展计划(973计划)(2012CB026000);北京市博士点基金资助项目(20110010110009)
