改进的TW-API方法及其在时变模态参数辨识中的应用
2015-01-07倪智谭述君吴志刚
倪智 宇,谭述君,吴志刚,
(1.大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024;2.大连理工大学航空航天学院,辽宁 大连116024)
改进的TW-API方法及其在时变模态参数辨识中的应用
倪智 宇1,谭述君2,吴志刚1,2
(1.大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024;2.大连理工大学航空航天学院,辽宁 大连116024)
改进了一种用于模态参数辨识的截断窗逼近幂迭代子空间方法(Truncated Window Approximated Power Iteration,TW-API)。该算法采用输入输出信号的截断窗互相关函数建立信号主子空间的递推关系,应用子空间投影来进行辨识。跟传统的TW-API方法相比,改进后的TW-API方法基于信号子空间理论,简化了数据矩阵递推的过程,显著地减少了算法的整体计算量和计算时间,同时仍能较好地保持辨识精度。在数值算例中,选用二连杆机械臂和在轨航天器模型这两个算例,分别进行了时变模态参数的辨识,并将结果与经典的投影估计子空间跟踪方法(Projection Approximation Subspace Tracking,PAST)和逼近幂迭代(Approximated Power Iteration,API)递推方法进行比较,4种辨识方法的仿真结果表明本文提出的新算法能有效辨识系统的时变模态参数。
模态参数辨识;时变系统;递推子空间方法;航天器
引 言
在现代工程应用中,航空航天、机械制造、交通等领域的许多问题都需要考虑到系统的时变特性,例如大型空间结构的搬运装配、太阳能帆板的展开与旋转、机械臂的运动以及高速列车的行驶等。由于线性时变系统的特性比定常系统更为复杂,而且定常系统的模态分析理论并不完全适用于时变系统,所以时变系统的理论到现在仍然处于建立的初步阶段,还没有在一个完整的框架下描述。从工程应用的角度来说,Liu等[1]提出了“伪模态参数”的概念,即按照定常系统中模态参数的概念,利用“时间凝固法”将其扩展到时变系统中,即认为在极小的时间间隔内的模态参数是不变的,从而在各个采样时刻分别计算出当前时刻的模态参数,利用这些伪模态参数反映系统的时变特性。
关于时变系统的模态参数辨识,当今主要的处理思想之一是利用子空间方法。子空间方法由于具有良好的鲁棒性,所以得到了广泛的应用。子空间方法根据辨识形式的不同,可以分为整体数据辨识和递推数据辨识方法。在利用整体数据辨识方面,K Liu[1-2]首先提出了一种利用输入输出整体数据辨识系统模型的时变子空间方法。于开平[3]等利用该方法对移动质量简支梁系统进行了辨识。李会娜[4-5]等在模态参数辨识的基础上对时变系统物理参数进行了辨识。在递推辨识子空间方面,Tasker[6]和Bosse[7]提出了一种利用URV分解的递推子空间方法。Yang[8-9]等根据信号处理的原理,提出了投影估计子空间跟踪方法(Projection Approximation Subspace Tracking,PAST)。庞世伟[10]等在此基础上提出了固定长度平移窗改进子空间方法,并利用PAST法辨识了移动质量-简支梁的时变模态参数[11]。Real[12]等提出了快速估计子空间方法(Fast Approximate Subspace Tracking,FAST)。HUA[13-14]等基于PAST法提出了自然幂迭代(Natural Power Iteration,NPI)方法。Badeau[15-16]等针对PAST法信号子空间列向量不能严格正交的问题,提出了逼近幂迭代(Approximated Power Iteration,API)方法,对信号子空间投影乘以修正后的正交矩阵,使其投影子空间保持严格正交的同时可以跟踪快变的主子空间,并且在此基础上提出了快速API方法(Fast API,FAPI)。与整体数据辨识方法相比,递推辨识方法不需要逐一时刻进行奇异值分解的计算,而是通过信号子空间的迭代以避免较高维数的Hankel矩阵求解问题,从而减小了计算量。
本文基于API方法的理论,不同于一般的无限指数窗API方法,而是选用截断窗子空间方法(Truncated Window API,TW-API)进行递归辨识。文[16]中提出的TW-API方法需要给出辨识时刻之前各个时刻的子空间输入信号作为递归总体数据矩阵,给定初值以用来递归计算。与文[15-16]相比,本文简化了输出信号的数据处理过程,不需要构建递归总体数据矩阵;而且从信号子空间原理的角度出发,对递推过程中需要较大计算量的步骤做了递推的简化,使得方法在保持基本计算精度的前提下大幅减少了计算量;最后给出了改进后的TWAPI的计算流程,并讨论了截断窗长度对辨识的影响。数值仿真选用二连杆机械臂和技术试验卫星-VIII(Engineering Test Satellite-VIII,ETS-VIII)模型这两个算例,采用本文改进后的递推方法进行时变模态参数的辨识。此外还将该方法与现有的TWAPI,PAST和指数窗API三种方法进行了计算精度和计算效率的比较,从而验证了本文算法的有效性。
1 激励与响应数据的前处理
为了利用子空间跟踪算法进行参数的辨识,输入输出数据的前处理是必不可少的,无论是应用FAST,PAST或是API递推方法,均需要通过系统输入输出数据矩阵构建对应时刻的状态量变化作为子空间跟踪中的输入信号参数,然后通过在子空间追踪方法中不断更新该状态量(即不断更新输入输出数据),来达到对系统的能观性矩阵(信号子空间)的追踪求解,进而得到时变系统的模态参数。
1.1 信号子空间中输入的迭代更新

在这一部分中,采用文[6-7]中给出的方法进行输入输出数据的预处理。考虑如下的离散时变系统其中方程中系统的阶数为n,输入的维数为r,输出维数为m。则某一时刻的输入矩阵U(k)和输出矩阵Y(k)以及下一时刻的输入数据¯u(k+1)和输出数据¯y(k+1)的Hankel矩阵形式分别可以写为

其中


其中k为对应的时刻,M为选取的合适的Hankel矩阵维数。根据数据更新的递归方法[6-7],令

则通过输入输出数据生成的状态量z(k)的更新方式为

在式(4)和(6)中,下一个时刻k的[U(k)UT(k)]-1和[Y(k)U†(k)]的更新方式为
[U(k)UT(k)]-1=[U(k-1)UT(k-1)]-1-

通过式(4)~(8)的递推,利用各个时刻的¯u(k)和¯y(k)构建出每个时刻的状态量z(k)(即在信号子空间中的每个时刻的输入信号),以满足子空间迭代求解中的数据更新条件。
1.2 初始信号主子空间的构建
选取时变系统的任意k时刻作为初始时刻,构建输入矩阵U(k)的投影正交矩阵U⊥(k),使得U(k)U⊥(k)=0,则

式中U†(k)为U(k)的伪逆,I为单位矩阵。
通过等式右乘矩阵的投影正交矩阵,消去第2项,则Y(k)U⊥(k)=Γ(k)X(k)U⊥(k),对Y(k)U⊥(k)进行奇异值分解,得到
式中R(k)为mM×mM正交矩阵,则R(k)前n列组成的矩阵即为该时刻的能观性矩阵Γ(k)。
在实际计算中,通过输入输出数据构建出每个时刻的Z(k)作为子空间追踪的输入信号。并利用奇异值分解求取某一时刻Y(k)U⊥(k)对应的能观性矩阵Γ(k)。将z(k)和Γ(k)分别作为子空间追踪的输入量x(k)和初始信号子空间W(0),这样就完成了对系统输入输出数据的前处理过程。
2 改进的TW-API方法
基于篇幅所限,本文只给出针对传统TW-API方法所进行修改的部分,详细的TW-API方法推导过程请参考文[16]。该文中给出的传统TW-API方法流程如表1所示。
从表1中可以看出,原文构建了递归总体数据矩阵X(k)≜[x(k-l+1),x(k-l+2),…,x(k)]和ˆV(k),通过X(k)和ˆV(k)的递归运算来计算v(k),为此还另外定义了一个ˆv(k)作为状态量v(k)的近似值,而在本文中,认为递归运算中v(k)=ˆv(k),即直接建立(k)与v(k)的关系,从而省略文[16]中构建输入/输出总体数据矩阵X(k)和ˆV(k)的步骤,直接利用(k),v(k)和(k)建立子空间追踪的关系。这样也就不需要给定总体数据矩阵的初值X(0)和ˆV(0),有效地减少了计算量和计算时间。
此外,从表1中给出的每一步骤的计算量可以看出,在传统TW-API算法的步骤(10)和(12)中,这两步的计算量均为O(n3),当系统的阶次较高时对算法整体的计算量将有极大的影响。为此,本文考虑减少步骤(10)和(12)中有关Z(k)和Θ(k)的递推计算量。

表1 传统TW-API方法递推步骤[16]Tab.1 The recursive step of traditional TW-API method
首先从子空间输出信号s(k)的自相关函数Css(k)的递推关系出发,因为Z(k)=Css(k)-1,而自相关函数的递推关系为


利用矩阵求逆引理,即对于B=A+PJQ,有

那么利用式(13)的求逆引理对式(12)进行求逆,可以得到

对比表1中的步骤(10)的计算量O(n3)(具体的计算量为3n2+4n3),式(14)给出的Z(k)新的递推步骤的计算量为O(n2)(具体计算量为20+10n+5n2),从计算量的阶次上可以看出很明显地减少了计算量。
接下来考虑Θ(k)的递推步骤的改进,定义ε(k)为表1中误差矩阵的平方根

从表1的步骤(12)中可以得到Θ(k)和它的转置矩阵Θ(k)H的关系为

将式(15)代入式(17)并应用矩阵求逆引理,可得



定义2×2的正定矩阵

这样就得到了Θ(k)的新的递推关系。和表1中递推Θ(k)的步骤对比计算量,表1中原方法计算Θ(k)的计算量为4m M+O(n3),而新方法中有关Θ(k)递推的总计算量为O(n2),从而简化了计算量。新方法与原方法相比,计算时间的优化将在下一部分内容中通过数值仿真来证明。改进后的TW-API方法步骤见表2。

表2 改进后的TW-API方法递推步骤Tab.2 The recursive step of improved TW-API method
利用改进的TW-API法计算得到各时刻的信号子空间W(k)后,离散的系统矩阵(k)可以通过下式得到

式中W1(k)和W2(k)分别为矩阵W(k)的前(M-1)×m行和后(M-1)×m行元素所组成的矩阵。这里(k)的上标“ˆ”表示辨识值,符号“†”表示伪逆。对辨识得到的ˆA(k)矩阵进行特征值分解可得

式中Λ(k)=diag(λ1(k),λ2(k),…,λn(k))为对角特征根矩阵,λi(k)是时变共轭复特征根,ψ(k)为时 变特征向 量。第i阶 伪特 征根λi(k)=。其中ζi(k)为系统的第i阶伪阻尼比,ωdi(k)为系统的第i阶含阻尼的伪固有频率,Δt为采样时间,图1给出了时变模态参数辨识算法的简要流程图。

图1 时变模态参数辨识算法流程图Fig.1 Flow charts of identification algorithm of time-varying modal parameters
3 仿真算例
3.1 算例1——二连杆机械臂模型
第1个数值算例选用一个二连杆机械臂的例子,结构的示意图如图2所示。机械臂为均匀刚性杆,质量均为m,长度均为l。u1和u2为在关节上施加的作用力矩。关节1和关节2的阻尼为d1和d2,转动刚度为k1和k2。一个时变的作用力f(t)施加在连杆的自由端,f(t)与水平方向x轴的夹角为φ3。角度φ1和φ2为连杆相对于x轴的位置。当连杆受到扰动时,连杆将会在它们的平衡位置附近振动,则实际角度为φ1=φ10+φ11和φ2=φ20+φ21,其中φ10和φ20为连杆与水平方向的初始夹角。假定该系统做微幅振动,则系统的线性模型可以写为


图2 二连杆机械臂模型Fig.2 Model of two-link robotic manipulator

其中,a1=
仿真中使用如下的参数:l=1 m,m=1 kg,d1=d2=0.8N·m·s/rad,k1=k2=80 N·m/rad,初始角度φ10=0°,φ20=90°,φ3=90°。作用力f(t)按以下方式变化:

其中f0=20 N,Δf=10 N。输入u(t)为单位方差的高斯噪声信号。状态空间方程中的输出矩阵直接给定为单位阵,即量测方程为y=x,采样频率100 Hz。定义输出信号的信噪比(Signal Noise Ratio,SNR)为

式中σr表示原输出信号的标准差,σnr表示含有噪声的输出信号标准差。在本算例中,输入输出Hankel矩阵中M=20,遗忘因子β=0.98。图3给出了在信噪比SNR=50情况下的频率辨识值。由图3可以看出,对于这样一个同时包含突变和周期变化特点的系统,时变模态参数可以被有效地跟踪得到。

图3 频率值辨识结果的比较(SNR=50)Fig.3 Comparison of the identified results of pseudo natural frequencies values(SNR=50)
为了定量地反映本文方法的计算精度,定义辨识结果的平均绝对百分误差(Mean Absolute Percentage Error,MAPE)eMAPE如下

式中ωk和分别为k时刻的频率的理论值和辨识值,L为采样点数。当考虑不同的信噪比时(这里分别选取SNR=30,50和100时的情况),得到的系统各阶频率的MAPE误差比较如表3所示。从表中可以看出,改进后的TW-API方法在不同信噪比下均能满足频率辨识的计算精度要求。值得说明的是,目前时变模态参数的辨识重点主要关注于频率的辨识,而对于时变阻尼和振型的辨识还比较少见。现有的子空间方法往往在其辨识中存在着较大的误差(例如对时变阻尼的辨识,有时在噪声的影响下可以达到30%;而某些时变系统还可能会有某几阶振型错位的现象),故对于阻尼和振型的辨识研究还需要做进一步的研究工作。

表3 利用传统和改进后的TW-API方法得到的频率值的MAPE的对比Tab.3 The MAPE comparison of frequencies by traditional and improved TW-API method
3.2 算例2——ETS-VIII卫星模型
在第2个数值算例中,以日本的ETS-VIII卫星为研究对象,它的基本构型以卫星本体为中心,一对太阳能帆板(以下简称帆板n和s)以及一对巨大的抛物面通讯天线(以下简称天线a和b)通过硬质连杆铰接到卫星本体上,具体的结构描述请参见文[17]。
由于ETS-VIII为地球同步卫星,为了保证太阳能帆板朝向太阳以获得足够的电力,帆板在电机的驱动下绕卫星的俯仰轴进行转动,其旋转角θ是周期变化的,从而导致卫星的模态参数是时变的。对于这样的航天器,一般将卫星的中心星体作为刚体、星体所连接的附件作为柔性体来进行考虑。则对于这样一个呈现出刚柔耦合特性的结构,考虑到刚体的转动和附件的振动,构建对应的约束模态模型,利用卫星的刚体转动方程和柔性附件的振动方程,建立模型的刚柔耦合动力学方程[17]。

式中fm为卫星反作用飞轮产生的控制力矩。Ψ和J(θ)分别为整星的姿态角矢量和转动惯量;P(θ)为附件振动和卫星转动耦合的柔性系数耦合矩阵;μj为每个柔性附件的模态坐标为附件的模态刚度矩阵,=diag[ω2j1,…,ω2jp],其中ωjp为柔性附件j的第p阶模态频率;ζj为对应的附件j的阻尼比。
将方程(28)和(29)改写为一般的动力学方程形式

其中详细的质量矩阵等参数的形式参见文[17]中的表述,而方程中的状态量q为

该卫星系统中前三阶模态参数表示为刚体运动,从第4阶开始是弹性振动对应的模态参数。即该动力学方程里包含有刚体运动和弹性振动两部分,在这里只考虑辨识除刚体运动外的前四阶弹性振动对应的频率值。
在本文中考虑帆板做匀速转动、即旋转角速度ωθ为常值的情况,建立帆板旋转角θ和时间t之间的线性对应关系θ=ωθt,那么就可以将线性变参数模型转化为一般的线性时变模型来进行分析。
本文在对卫星进行有限元建模时将原卫星天线的壳型薄板简化为矩形平板,且天线和帆板处在同一平面上,该平面经过卫星本体的质心;卫星本体是一个规则的长方体,天线和帆板各自的铰接点均在卫星本体上。为了计算得到方程(28),(29)中的整星转动惯量和附件的刚柔耦合系数等方程参数,本文将总体坐标系的原点取在整星的质心,而附件坐标系均建立在各自的质心上。简化后的卫星结构如图4所示。

图4 简化后的卫星示意图Fig.4 Image of simplified satellite
在数值仿真中,输入选取为方波激励信号,利用Newmark法计算系统响应,并在输出中加入2%的量测白噪声干扰。信号的采样频率为10 Hz,Hankel矩阵中M=15,递推算法中的遗忘因子β= 0.98。分别利用改进的TW-API和传统TW-API方法辨识系统除刚体运动外的前四阶振动模态频率,其中关于截断窗的长度l的选取,通常情况下令0.5m M≤l≤2m M[16],其中m M即为信号子空间W(k)的行数,窗的长度太小的话将直接影响计算的精度。在本文中l的长度取为信号子空间W(k)的行数的3/2,即l=1.5m M。频率值的辨识结果如图5~9所示。

图5 第1阶频率辨识结果Fig.5 Identification result of the first-order frequency

图6 第2阶频率辨识结果Fig.6 Identification result of the second-order frequency

图7 第3阶频率辨识结果Fig.7 Identification result of the third-order frequency
从图5~9可以看出,改进后的TW-API与传统的TW-API方法相比,仍能很好地辨识系统的模态参数。接下来从计算时间上和原TW-API方法进行比较,进行10次重复试验,分别统计采样点数为1×104,5×104和10×104个时的仿真计算时间。仿真的系统硬件条件为:Windows 8 64位系统、CPU处理器Intel酷睿i7 4700MQ、内存容量8G,数值仿真使用的软件为Matlab,计算机仿真所需要的时间对比结果见表4。

图8 第4阶频率辨识结果Fig.8 Identification result of the fourth-order frequency

图9 传统TW-API方法频率辨识结果Fig.9 Identification result of frequencies by the traditional TW-API method
从表4的仿真时间的结果可以看出,与传统的TW-API方法相比,改进后的TW-API方法可以提高约50%的计算效率,证明该方法的递推步骤的计算量简化是有效的。再利用文[8]和[15]中分别提出的经典的PAST和指数窗API方法,在相同条件下对该算例进行辨识,各阶频率的辨识结果见图10 和11。上述4种方法得到的系统各阶频率的MAPE误差比较如表5所示。

图10 PAST方法的频率辨识结果Fig.10 Identification result of frequencies by the PAST method

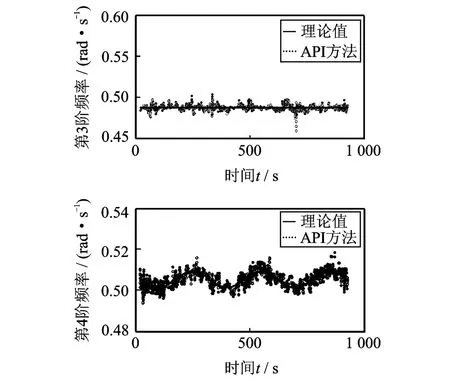
图11 API方法频率辨识结果Fig.11 Identification result of frequencies by the API method

表4 传统和改进后的TW-API方法的计算时间对比Tab.4 The computation time comparison of traditional and improved TW-API method
从表5可以看出,本文提出的改进TW-API方法由于采用了截断窗形式,所以与指数窗形式的PAST和API方法相比,误差稍有增加,但误差的精度量级仍能很好地满足辨识要求;而与传统的TW-API方法相比,保留了原有的计算精度。将表4和5的计算结果结合起来分析,可以看出改进的TW-API方法在保证了原有计算精度的前提下大幅减少了计算量,证明本文提出的改进TW-API方法在辨识系统的动力学参数方面是有效的。
4 结 论
本文从截断窗逼近幂迭代子空间方法出发,对现有的TW-API方法进行了简化和改进,使得在保持原有逼近幂迭代方法的投影子空间正交性的同时,不再需要构建输入输出总体数据矩阵用于迭代运算;同时从信号子空间递推理论出发,通过建立新的数据矩阵的递推关系,成功地减少了矩阵递推运算中需要的计算量,从而有效地减少了运算时间。通过二连杆机械臂和ETS-VIII卫星模型的例子,采用本文改进的TW-API方法进行时变模态参数的辨识。从辨识结果可以看出改进的TW-API方法与原来的方法相比,计算时间减少了约50%,而且仍然能够保证计算的精度。在仿真算例中还与常用的PAST和指数窗API递推辨识方法进行了比较,结果证明本文提出的算法能够有效地辨识时变系统的模态参数。
[1] Liu K.Identification of linear time-varying systems [J].Journal of Sound and Vibration,1997,206(4):487—505.
[2] Liu K.Extension of modal analysis to linear time-varying systems[J].Journal of Sound and Vibration,1999,226(1):149—167.
[3] 于开平,谢礼立,樊久铭,等.移动质量简支梁系统的参数辨识[J].地震工程与工程振动,2002,22(5):14—17. Yu Kaiping,Xie Lili,Fan Jiuming,et al.A parameter identification of simply supported beams system carrying a moving mass[J].Earthquake Engineering and Engineering Vibration,2002,22(5):14—17.
[4] 李会娜,史治宇.基于自由响应数据的时变系统物理参数识别[J].振动工程学报,2007,20(4):348—352. Li Huina,Shi Zhiyu.Physical parameter identification of time-varying system based on free response data [J].Journal of Vibration Engineering,2007,20(4):348—352.
[5] 李会娜,史治宇.基于随机激励响应的时变系统物理参数子空间识别方法研究[J].工程力学,2008,25 (9):46—51. Li Huina,Shi Zhiyu.Subspace-based physical parameter identification of time-varying system using random excitation response[J].Engineering Mechanics,2008,25(9):46—51.
[6] Tasker F,Bosse A,Fisher S.Real-time modal parameter estimation using subspace methods:theory[J]. Mechanical Systems and Signal Processing,1998,12 (6):797—808.
[7] Bosse A,Tasker F,Fisher S.Real-time modal parameter estimation using subspace methods:applications[J].Mechanical Systems and Signal Processing,1998,12(6):809—823.
[8] Yang B.Projection approximation subspace tracking [J].IEEE Transactions on Signal Processing,1995,43(1):95—107.
[9] Yang B.Asymptotic convergence analysis of the projection approximation subspace tracking algorithms [J].Signal Processing,1996,50:123—136.
[10]庞世伟,于开平,邹经湘.用于线性时变系统辨识的固定长度平移窗投影估计递推子空间方法[J].机械工程学报,2005,41(10):117—122. Pang Shiwei,Yu Kaiping,Zou Jingxiang.Using recursive subspace method based on projection approximation with moving window to estimate parameters of linear time-varying structure[J].Chinese Journal of Mechanical Engineering,2005,41(10):117—122.
[11]庞世伟,于开平,邹经湘.用于时变结构模态参数识别的投影估计递推子空间方法 [J].工程力学,2005,22(5):115—119. Pang ShiWei,Yu Kaiping,Zou Jingxiang.A projection approximation recursive subspace method for identification of modal parameters of time-varying structures[J].Engineering Mechanics,2005,22(5):115—119.
[12]Real E C,Tufts D W,Cooley J W.Two algorithms for fast approximate subspace tracking[J].IEEE Transactions on Signal Processing,1999,47(7):1 936—1 945.
[13]Hua Y B,Xiang Y,Chen T,et al.A new look at the power method for fast subspace tracking[J].Digital Signal Processing,1999,9(4):297—314.
[14]Hua Y B,Xiang Y,Chen T,et al.Natural power method for fast subspace tracking[A].Neural Networks for Signal Processing IX,1999.Proceedings of the 1999 IEEE Signal Processing Society Workshop. IEEE[C].Madison,USA.1999:176—185.
[15]Badeau R,Richard G,David B,et al.Approximated power iterations for fast subspace tracking[A].Signal Processing and Its Applications,2003.Proceedings. Seventh International Symposium on.IEEE[C].Paris,France.2003,2:583—586.
[16]Badeau R,David B,Richard G.Fast approximated power iteration subspace tracking[J].IEEE Transactions on Signal Processing,2005,53(8):2 931—2 941.
[17]Hamada Y,Ohtani T,Kida T,et al.Synthesis of a linearly interpolated gain scheduling controller for large flexible spacecraft ETS-VIII[J].Control Engineering Practice,2011,19:611—625.
(1.State Key Laboratory of Structural Analysis for Industrial Equipment,Dalian University of Technology,Dalian 116024,China;2.School of Aeronautics and Astronautics,Dalian University of Technology,Dalian 116024,China)
An improved TW-API recursive method and its application on time-varying modal parameters identification
NI Zhi-yu1,TAN Shu-jun2,WU Zhi-gang1,2
An improved method based on Truncated Window Approximated Power Iteration(TW-API)Tracking for modal parameter identification is proposed in this paper.The truncation window cross-correlation function of input and output signals is adopted to establish the recursion relation of signal dominant subspace,and subspace projection is then used to identify the modal parameters.Compared with the traditional TW-API method,the improved one,which is based on the theory of signal subspace,simplifies the recursion procedure of data matrix,significantly reduces the computing cost and computation time,and meanwhile guarantees the calculation accuracy.In numerical simulation,a structure of two-link robotic manipulator and a model of on-orbit spacecraft are used to identify the time-varying modal parameters.Moreover,the computation results of these two methods are also compared with the classical Projection Approximation Subspace Tracking(PAST)and Approximated Power Iteration(API)recursive methods.The results of the four identification methodologies demonstrate that the proposed new algorithm in this paper can effectively identify the time-varying modal parameters of the system.
modal parameter identification;time-varying system;recursive subspace method;spacecraft
TB123;N945.14
A
1004-4523(2015)05-0721-09
10.16385/j.cnki.issn.1004-4523.2015.05.006
倪智宇(1985—),男,博士研究生。电话:(0411)84706772;E-mail:nizhiyu-8597@mail.dlut.edu.cn
吴志刚(1971—),男,博士,教授。电话:(0411)84706772;E-mail:wuzhg@dlut.edu.cn
2014-04-03
2015-05-11
国家自然科学基金资助项目(11072044,11372056,11002032);高等学校博士学科点专项科研基金资助项目(20110041130001)
