基于人机工程学的老年人助力座椅设计
2015-01-06陈凯文高琴斌徐锳子周志勇上海电机学院
陈凯文 高琴斌 秦 文 徐锳子 周志勇/上海电机学院
基于人机工程学的老年人助力座椅设计
陈凯文 高琴斌 秦 文 徐锳子 周志勇/上海电机学院
社会老龄化是我国的发展趋势,急需开发针对老年人的助力装置。而且目前市场上还没有大规模生产的老年助力的机器,各界对老年助力椅的研究也不成熟,因此开发和研究新型老年人助力机器很重要。本文针对因下肢骨关节炎而导致行走站立困难的患者,提出了并联气动助力和杠杆力的叠加力为动力椅的设计构想,并开发设计了适用于腿关节患病情况的助力椅试验样。试验样机的并联机构和杠杆力能为患者提供足够的支撑力。试验结果证明了设计思想的合理性和减轻起身压力且助力的有效性。
并联机构;气动减重;支撑力;身体平衡,人机工程
因腿部的机能衰退而引起的行走困难现象是现在的老年人常见疾病,这种疾病严重影响了老年人的生活质量。依据2000年第五次人口普遍调查的结果显示65岁及以上人口占总人口的比重为6.7%,并且每年平均增长的速度达到3.28%,到2020年中国老年人口会达到2.5亿。在老年人坐下、站立困难的患者当中,经常可见的是因为下肢骨关节炎等疼痛。借助外部支撑来减轻腿关节所受的重荷,是帮助老年人直立或行走的有效的方式。减重站立或步行可以通过拐杖、助力器等方式来实现有效助力。但是手动器械的助力使用依靠手臂力量。一旦手臂力量过小,减重助力效果的发挥将会很有限,也容易使手臂等部位产生疲劳感。
此外,使用手动器械帮助站立时,手臂因为被占用了,影响了其他工作的进行,也会给生活带来很多麻烦。所以有腿关节病的老年人患者运动进行的很少,这种恶习使腿部的锻炼缺乏,容易导致腿部的血液循环不通畅。很多医学实践表明,对于这些骨关节炎老年人患者,最可靠的方法是就像在水中进行站立那样,腿部关节在很小的负荷下增高运动频率。这样的训练既可以产生有效的物理康复作用。但是这种训练方式只能专门到有水池的局限地方展开,是不切实际的。日常生活中,帮助老人助力方面一直没有找到解决方法。面对如此急切的社会需要,国内外对减重的助力椅研究成果还不是很成熟,当今市场上也缺少有效帮助老年人解决问题的大规模生产的产品,所以开展新型的老年人助力椅研究已经迫在眉睫。
一、国内助力机器的研究
国内对于助力器的研究起步比较国外晚的多,大部分研究都集中注意力于双足行走类机器人的学术研究,当今中国对于下肢关节炎患者或老年人开发行走助力的产品研究相当于没有,传统助力方式的手杖、拐杖还是目前市场上的主力军。六关节平面运动型双足步行器 “先行者”是国内第一台仿人机器人,紧接着各单位都开展了老年人助力机器人的研究,并取得了相当可观的成果。另外,汉库科技企业成功推出一款双足行走机器人,称是目前中国最先进的双足行走机器人。上海大学研制的下肢康复机器人可以起到平衡缓冲作用使得忠者在训练时相对于跑步机而固定,还保证了人在行走时上、下振动的自由度不被限制。然而针对站立助力系统的器械还十分少见。
二、技术支持
在人机工程学原理的指导下,针对老年人从椅子上起身不方便的特点,通过对老年人倚靠行为、变化姿势、人际距离、生活习惯等的观察、分析与研究,发现现有座椅在形态、功能、色彩、材质、可移动性等问题,发现老年人在空间内活动时对座椅产生的各种需求,并以此为指导,从形态、功能、尺寸、材料、色彩、空间布局及分布数量等方面提出设计要求。
座高对于老年人助力椅的助力效果很重要,一般取人体腓骨头的高度(约人体总高的1/4)或略小于小腿高度1cm左右。据我国的人体高度一般取座高为43~45cm,座面深一般取45cm左右,另外座面可略向后斜6°左右,座靠背分肩靠和腰靠两部分,肩靠高度达肩胛骨下角,腰靠的高度要适合脊柱弯曲和腰曲的高度,两个靠背连在一起,其高度一般为50cm左右,座与靠背的夹角一般为100~110度,这样人坐上去以后,靠背和座面与人体背部,臀部,大腿形成的曲线相吻合,使老年人有舒适感。
基于此我们设计出如下所示助力椅,其结构如下:如(图2)所示,模块(1)是气缸辅助站立模块,由支撑板、轴承、气缸、升降杆组成;模块(2)是杠杆传动辅助站立模块,由踏板、杠杆、轴承、开关连杆、滑槽、滑杆(可在滑槽内滑动的杆件)组成;模块(3)是整体人机工程设计模块;基座(4);座板(5)。
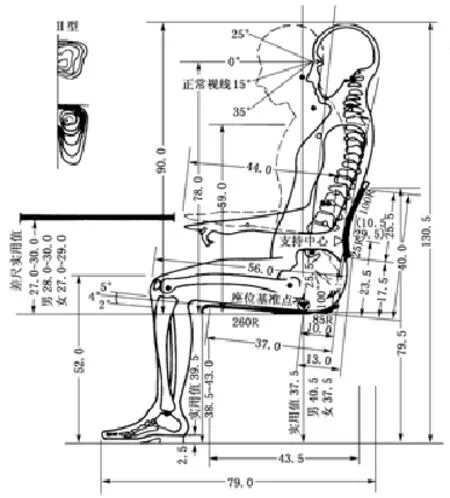
图1

图2
模块(1)采用的是气缸传动,其细节如(图3)所示,支撑板(12)可以绕基座(15)上轴承(16)旋转,支撑板(12)承担的是支撑气缸(13),当使用者开启气缸(13)的开关连杆(14),气缸(13)会产生一个向上的抬升力使得座板(18)绕铰链(17)旋转。

图3
模块(2)采用的是杠杆原理传动,其细节如(图4)所示,连杆(7)(10)会绕着连杆(6)旋转,连杆上部滑杆(8)可以在滑槽(9)内滑动并绕滑槽(9)转动,滑槽(9)与座板(18)相连,座板绕铰链(17)旋转,当使用者脚给踏板(11)一个向下的力,滑杆(8)给座板滑槽一个向上的力,促使座板(18)绕铰链(17)转动。

图4
座板与基座如(图5)所示,基座(15)上有多个轴承安装孔(16),可以安装轴承,让连杆与支撑板绕其转动;座板(18)可以绕铰链(17)旋转。

图5
本课题从设计的角度研究老龄化问题,并希望能通过设计的手段为改善我国老年人的生活状态、提高他们的生活质量尽上一份绵薄之力。本项目的主要目的就是提出一个真正符合人机工程学指标的老年人助力座椅机械模型,提高老年人的坐姿质量及起身便捷性。
首先,发掘可运用到座椅设计中的人机工程学方法和理论;其次,分析人体大腿骨骼的特点及老年人的心理特征;再次,进行人体坐姿腿部的运动分析及助力形式分析;然后,根据前面研究成果建立参数化人体腿部模型,确定坐姿设计所需达到的人机工程学指标及助力形式;最后,根据研究结果进行坐姿人机工程学设计,并通过实验验证。
通过对现有座椅的人机工程学性能的分析,以及自然状态下人坐姿活动状况的分析,结合已经确定的老年人人机工程学指标,提出基于人机工程学的老年人助力座椅的设计方案。并验证其运动情况符合人机工程学。
三、总结
本课题从设计的角度来看待和研究老龄化问题,并希望能通过设计的方法和手段为改善我国老年人的生活状态、为提高他们的生活质量尽上一份绵薄之力。
本项目的主要目的就是提出一个真正符合人机工程学指标的老年人助力座椅机械模型,提高老年人的坐姿质量及起身便捷性。
[1]王成玥,陈峰.人机工程学在座椅设计中的应用.美术大观,2011(1).
[2]廖红.老年人的心理特点及自我调适.基层医学论坛,2009(13).
[3]韩亚丽,王兴松.行走助力机器人研究综述.机床与液压,2008(2).
[4]黎善坤.如何为老人选座椅.老友,2006(09).
陈凯文∶(1994—),男,宁夏人,学士,上海电机学院学生,主要研究人机工程学。
高琴斌∶(1994—)男,河南人,学士,上海电机学院学生。
秦文∶(1993—),女,天津人,学士,上海电机学院学生。
徐锳子∶(1993-),女,上海人,学士,上海电机学院学生。
上海大学生创新活动计划项目(A1-5701-14-006-08-77 A1-5701-15-012-01-090)。
