适应多型毫米波雷达数据的通用读取程序设计
2015-01-05王会,王旭,2
王 会,王 旭,2
(1.成都信息工程学院电子工程学院,四川成都610225;2.中国气象局大气探测重点开放实验室,四川成都610225)
0 引言
与现有的厘米波气象雷达相比,毫米波雷达波长更短,与云中粒子的相互作用更强,对尺度小的云粒子而言,获得后向散射更强,因而更适合非降水与弱降水云的遥感观测[1]。毫米波雷达的发展最早开始于美国空军,在20世纪50年代至70年代初着手开始研发的8.6 mm波长(Ka波段)毫米波测云雷达,其型号是TPQ-11[2]。1964年,Harper[3]利用 AN/7PQ-11 型号的毫米波雷达进行云的垂直对空探测实验,在70年代早期[4],因雷达磁控管出错频繁,该型号雷达停止运行,到70年代末期Hobbs等开发了新的元件使AN/7PQ-11恢复正常工作[5]。其后随着技术的进步,又相继发展了具有多普勒和双极化功能的Ka云雷达。中国毫米波测云雷达起步比较晚,对毫米波测云雷达研究还较少,首次用毫米波雷达做气象探测是在1980年,由中国科学院大气物理研究所同安徽井岗山机械厂协作研制成的双波长雷达(波长为3.2 cm和8.2 mm)[6]。2006年空军第七研究所和安徽四创电子有限公司协作研制成了一部毫米波测云雷达(波长8.6 mm),主要用于监测云内的积水情况以利于飞机的安全飞行[7]。2007年中国气象科学研究院与中国航天研究二院第二十三所联合研发了具有多普勒和极化功能的测云雷达(波长为8.6 mm)[8]。现在最常用的个毫米波雷达的波段为35 GHZ(8 mm)和95 GHZ(3 mm)。
云是研究大气系统的重要要素,一方面因将大气顶层的太阳短波辐射反射回大气中而对地气系统起到了冷却作用,另一方面要吸收来自地表和云之间的大气长波辐射,又对地气系统起到了增温作用。地球表面以上的天空大约50%以上被云所遮盖。所以对云的研究非常必要,云不仅对自然降水起到了很大的作用,更是人工降水的重要要素[9]。要根据毫米波雷达分析云的结构(如云高、云厚、云内液态含水量、粒子有效直径等重要参数)就必须先清楚毫米波雷达探测到的数据文件格式,以便于准确地提取原始数据。2013年,楚志刚等[10]、顾松山等[11]分析了新一代天气雷达格式,利用各个天气雷达基数据各自的特征,不同格式之间存在的明显差异,给每一种格式的基数据定义了一组判据,从而实现新一代天气雷达基数据文件格式的自动识别。目前国内已有的不同型号的毫米波雷达较少,文中主要以3种较为常用的毫米波雷达为基础进行分析研究,总结出这3种型号的雷达基数据判别方法,并用大量的基数据进行验证,结果表明文中给出的分析方法有效可行。
与常用的天气雷达相比较,毫米波云雷达波长更短,其对于云这类小粒子更加的敏感且毫米波雷达空间和时间分辨率高,能够获得更加精细的云结构[12]。对于毫米波雷达的系统以及对云的探测能力目前已经有很多的相关研究。2011年王斌等[13]利用武汉暴雨所的SCRMP-03型号的毫米波雷达与双偏振雷达置于同一个观测地点,利用观测得到的资料对云雷达的探测能力进行分析,得出云雷达各种探测量对于反映不同类型云的宏观和微观特征中的表现以及可能用途。2014年谢蕾等[14]利用毫米波雷达与雨滴谱仪联合观测,得出毫米波雷达对于探测低层弱降水云得到的径向速度、谱宽、归一化功率谱具有一定的准确性。2007年KolliAs等[15]概述毫米波雷达从最早开始到现在在云和降水方面的前沿研究,提出云雷达在探测云方面有其独特的优势,且云雷达和其他探测设备(如激光雷达)的结合探测、云雷达的可移植性使其适合放在移动平台上。
1 3种型号毫米波雷达简介
SCRMP-03型毫米波雷达由安徽四创电子股份有限公司生产。主要用于非降水云和弱降水云的探测,可以实时获取探测范围内云的分布、位置、强度、速度及谱宽等相关信息。通过对云探测到的数据信息,为气象研究提供云底高、云厚、云的分布等结构资料以及云的状态属性等以及云相态、云滴谱和云中气流分布等气象资料。还可以通过对探测数据反演研究云的微物理结构。
GLC-64型毫米波测云雷达是由国睿科技公司生产。主要用于观测非降水云系和弱降水云的三维动态结构,识别云内相态、水成物含量、云内气流分布,进而推断云内微物理结构参数。系统采用单发双收体制,具有固定式和移动式两种工作平台,其中移动式又具有方舱移动式、依维柯车载移动式两种结构方式。
成都784厂雷达研究所与成都远望科技有限责任公司联合研制生产的毫米波测云雷达,目前在成都信息工程学院运行的毫米波雷达就是其成功案例。T探测并保存了较多的基数据,可用于验证文中研究的识别方法。表1列出这3种不同型号的毫米波雷达性能参数对比。

表1 3种型号毫米波云雷达参数对比
2 3种型号毫米波雷达基数据文件格式分析
2.1 四创公司SCRMP-03型毫米波雷达
SCRMP-03毫米波测云雷达(工作频率35 GHZ),其原始数据文件的文件头分为4个结构体组成:站址情况、性能参数、观测参数、其他信息如图1所示。数据文件存储格式如图2所示,原始数据文件由文件标识(12字节)、文件头(2048字节)和数据纪录块组成。文件头记载雷达站名、站址、雷达型号、主要参数、观测时间、扫描类型、工作状况等内容。数据记录以极坐标方式排列。
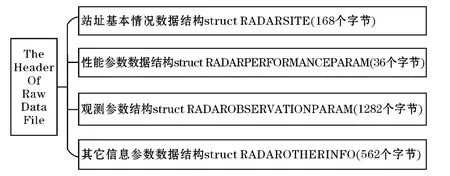
图1 SCMRP-03毫米波云雷达基数据文件头组成结构
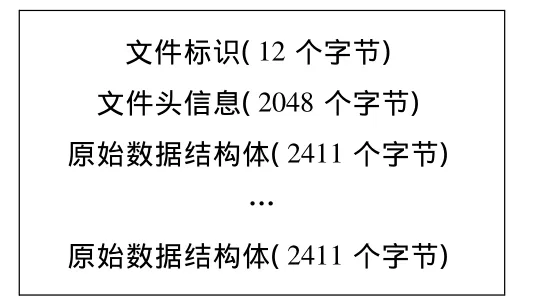
图2 SCMRP-03毫米波雷达基数据文件存储格式
2.2 国睿公司GLC-64型毫米波测云雷达
GLC-64毫米波测云雷达的数据格式和SCRMP-03毫米波测云雷达的格式十分类似,数据文件分3部分组成:文件标识(12个字节)、文件头信息(2048个字节)、雷达原始数据块。文件头由4个结构体组成:
(1)站址基本情况(共168个字节);
(2)性能参数(共36个字节);
(3)观测参数(共1282个字节),其中包括一个层参数信息数据结构和3个变库长数据结构;
(4)其他信息参数(共562个字节)。
其原始数据文件中数据存放的顺序和格式如图3所示。
2.3 784厂毫米波测云雷达
成都784所产的35 GHZ毫米波云雷达的存储格式如图4所示,数据是由于N个基数据包组成的(N为正整数由扫描方式和工作参数决定)。每个基数据包由3个部分组成:基数据头、雷达数据RVW、尾标记。扫描方式有3种:方位扫描、俯仰扫描、时间扫描。时间扫描方式是存放一天的数据,因而基数据包的个数由实际的工作参数决定。俯仰扫描保存的是从最高点到最低点或者从最低点到最高点的一个半程扫描的数据。方位扫描时,一个文件存放的是扫描一圈的数据,文件中包含N个径向的数据。
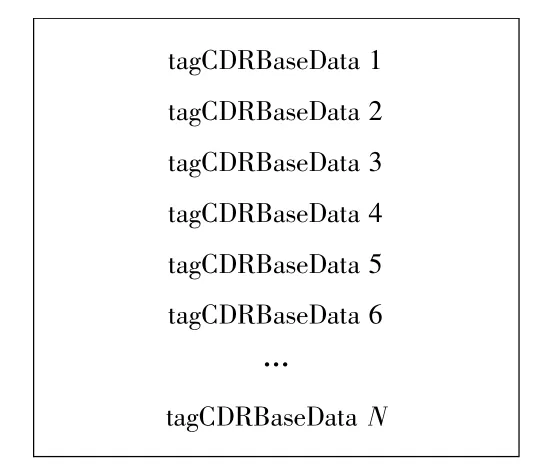
图4 784毫米波雷达基数据存储格式
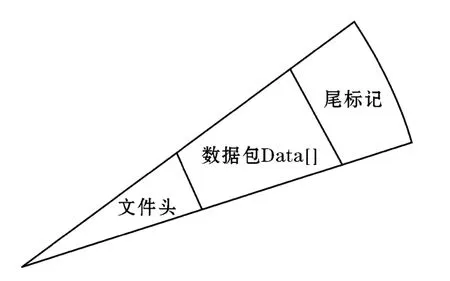
图5 一个基数据包tagCDRBaseData结构图
一个基数据包代表扫描一个径向的数据。基数据包的定义如下:
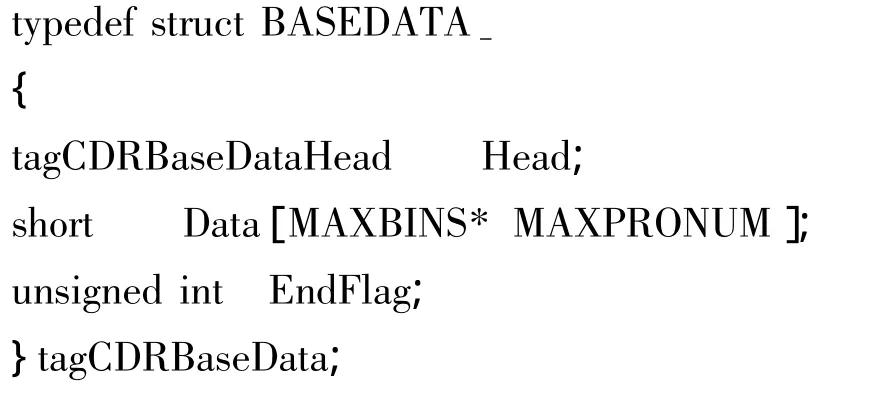
其中Data数组的大小为MAXBINS*MAXPRONUM,MAXBINS的大小定义为1280,MAXPRONUM 的大小为3。基数据头Head里面存放了记录数据的相关信息,如记录数据开始与结束的时间、以及雷达的状态参数。这些都可以作为分析数据格式的依据。Data[]数组里面存放了反射率、速度、谱宽3种数据。数据为16位有符号数。最后的是一个基数据包的尾标识,存放固定的信息,这也是识别的一个重要依据。一个基数据包tagCDRBaseData的结构如图5所示,每个径向的距离库数为600(400个对应距离为30 km)。
3 基数据文件识别方法
文中介绍的3种毫米波测云雷达基数据文件格式有明显的差异,如固定的参数信息,数据长度等变化的信息等。利用这些差异,为3种雷达基数据文件格式定义了5组判据,通过这些判据识别,如果一个数据文件属于某种型号的毫米波雷达,那么此文件一定同时满足这5个判据,否则不是这种型号雷达的基数据文件。
3.1 SCRMP-03基数据文件格式判别
(2)文件头FileHeaderLength的值为2048,在文件的[8~11]字节处。
(3)雷达型号 RadarType的值为“SCRMP-03”,在文件的[112~131]字节处。
(4)观测开始的时间在正确的范围内(1999<Year<2050、1< Month<12、1< Day<31、0<Hour<23、0<Min< 59、0<Sec<59),依次存放在文件的[217~224]字节处,其中Year占两个字节,其余占一个字节。
(5)雷达扫描的径向个数RecordNumber一定等于(FileLength-2060)/2411。
3.2 GLC-64基数据文件格式判别
(1)文件头长度FileHeaderLength为2048个字节,在文件的[0~3]字节处。
(2)文件标识和文件头长度共为2060,原始数据的一个基数据包大小为8011个字节,因此文件必满足(FileLength-2060)/8011为整数。扫描的径向个数为RecordNumber=(FileLength-2060)/8011。
(3)雷达型号 RadarType[] =“GLC-64”,在文件的[112~131]个字节处。
(4)时间在正确的变化范围内(1999<Year<2050、1< Month< 12、1< Day<31、0<Hour<23、0<Min<59、0<Sec<59),依次存放在在文件的[1364~1370]字节处,其中Year占两个字节,其余占一个字节。
(5)雷达扫描的径向个数RadarCoutNum=(File-Length-2060)/8011,存放在观测参数结构体中。
3.3 成都784厂毫米波雷达基数据文件格式判别
(1)文件长度FileLength是基数据包大小BaseSize的整数倍,BaseSize在文件(i*BaseSize+4~i*Base-Size+7)字节处,由4 个字节位置存放。i为 0,1,2,3,…RadarCoutNum。RadarCoutNum为雷达扫描总径向个数:RadarCoutNum=FileLength/BaseSi-ze。
(2)文件头标记为恒定值0xa5a54321,在文件(i*BaseSize~i*BaseSize+3)字节处。
(3)年月日时分秒必须在正确的范围内(1999<Year<2050、1<Month<12、1<Day< 31、0<Hour<23、0< Min<59、0< Sec< 59),这6个参数分别占四个字节,依次存放在文件的(i*BaseSize+12~i*BaseSize+35)字节位置处。
(4)版本号Version的值为1,在文件(i*BaseSize+8~i*BaseSize+11)字节处。
(5)尾标记EndFlag为恒定值0x5a5a1234,存放在文件[i*BaseSize+BaseSize-4]位置。
4 软件实现流程图
利用VC2010工具编写自动识别3种型号毫米波雷达基数据文件的软件。软件的基本流程图如图6所示。软件设计是以文中所研究的3种型号毫米波测云雷达基数据文件自动识别判据为依据。每种型号的雷达都有5组判据。程序就是根据每个型号雷达的判据之间的差异实现基数据文件的自动识别。给每种型号的雷达定义一个识别变量SBID,SCRMP-03型毫米波雷达(SBID=1)、GLC-64型毫米波雷达(SBID=2)、成都784厂毫米波雷达(SBID=3)、其它(SBID=4)。通过流程图(图6)可以看出程序主要分为3个重要部分。
第一部分是对784厂毫米波雷达基数据文件的识别。首先是判断文件的长度FileLength是否是基数据包BaseSize的整数倍,如果满足则进入径向循环,通过上面的判别,在文件的指定位置读取出相应的变量值,因为雷达数据是有N个径向组成,那么每个径向都必须满足5组判别条件。如果每个径向都同时满足5组判据条件,那么循环结束并给SBID赋值为1,否则SBID为4。
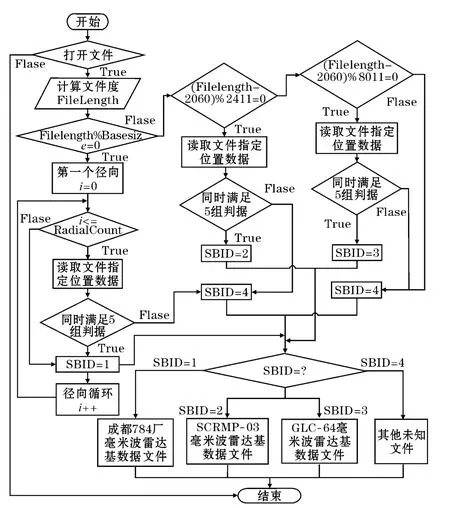
图6 毫米波基数据文件自动识别软件设计流程图
第二部分是对SCRMP-03型毫米波测云雷达基数据文件的识别。同样地,首先是计算出文件长度File-Length并判断式子(FileLength-2060)/2411的结果是否为整数,若成立则继续用其他4组判据条件验证文件。如果文件同时满足5组判别条件则此文件为SCRMP-03型毫米波测云雷达的基数据文件并给SBID赋值为2,否则给SBID赋值为4。
第三部分是对国睿公司GLC-64型毫米波雷达基数据文件的识别。判断(FileLength-2060)/8011是否为整数,如果为整数则继续用其他4个判别条件验证文件是否满足。若文件同时满足5组判据则此文件为GLC-64型毫米波雷达基数据文件并给SBID赋值为3,否则给SBID赋值为4。
最后,根据SBID中的值来判别文件格式类型,若SBID=1,文件为成都784厂毫米波雷达基数据文件;若SBID=2,文件为四创公司SCRMP-03型毫米波雷达基数据文件;若 SBID=3,则此文件为国睿公司GLC-64型毫米波雷达基数据文件;若SBID=4,文件为其他未知文件。
将相应的基数据文件识别后,利用matlab工具编写相应的绘图程序。改绘图软件可以同时兼容3种型号雷达对应的产品。
5 验证与应用
5.1 自动识别

图7 自动识别界面
根据以上判别方法结合VC编写一个MFC对话框应用软件来识别以上3种毫米波雷达基数据文件。随机选取200个未知数据文件(包括文中介绍的3种型号的毫米波雷达基数据文件)来验证。自动识别的软件界面如图7所示,其中的显示结果是识别的SCRMP-03型毫米波雷达的基数据文件,界面显示了文件里面的基本参数信息、扫描的时间信息、文件长度等。
5.2 产品显示
通过对3种型号云雷达基数据文件的识别结果,利用Matlab工具编写显示软件,该软件可以显示出3种不同型号雷达的反射率、速度、谱宽、退极化比4种产品以及4种不同的扫描方式(垂直定点扫描、平面PPI扫描、RHI扫描)。下面选取3种雷达不同扫描方式下产品的回波图。
雷达反射率被定义为单位体积内全部降水粒子的雷达截面之和,其大小在一定程度上反映云、雨粒子群的情况。速度谱宽是对一个距离库中速度离散度的度量,其与距离库内各个反射体的运动方向和速度差别成正比[15],谱宽数据[16]在对一些灾害性天气方面具有较好的预警作用。多普勒径向速度是指探测粒子对于雷达发射波束发生相对运动时利用多普勒效应原理所测得的散射体相对于雷达的速度。退极化比是由探测目标后向散射功率的垂直和水平分量的到的,与目标粒子的形状、大小、介电质、取向等有关,通过LDR值可以判断雷达探测到粒子的形状和相态。
毫米波雷达有多种扫描模式,其中模式有:平面扫描(PPI)、垂直定点扫描、俯仰扫描(RHI)、体扫模式,文中设计的绘图软件,实现对这4种扫描方式得到的反射率、速度、谱宽、退极化比产品的显示。
图8(a)~(f)是利用所设计的绘图软件显示相应产品回波图,其中图8(a)、(b)、(c)是2013年7月7日由784厂毫米波雷达所垂直定点扫描得到反射率、速度、谱宽回波图,该型号雷达垂直探测盲区是375 m,因此图中0到375 m区域是空白。图8(d)是GLC-64型号雷达2010年7月21垂直定点扫描探测的退极化比回波图。图8(e)、(f)是由SCRMP-03型号雷达的两种扫描方式得到反射率回波图,其中图8(e)为RHI扫描,图的横轴为水平探测距离,纵轴为垂直探测距离。图8(f)为平面PPI扫描,图中心点代表雷达所在位置。6个圆圈代表探测距离,最外圈为最大探测距离30 km,每一圈代
6 结束语
毫米测云雷达对于云的观测十分重要,通过编写自动识别3种毫米波雷达的基数据文件的软件以及同时兼容这3种不同型号雷达产品的显示软件,节省了显示软件的开发,有助于更好的对比分析这3种不同毫米波雷达产品。对于后续的有关研究是十分必要的,因此对于毫米波雷达的基数据文件格式分析是十分必要的。还有很多的不足,如由于目前国内毫米波雷达处于起步阶段,因此文中分析的种类偏少,后续工作将继续努力完善。
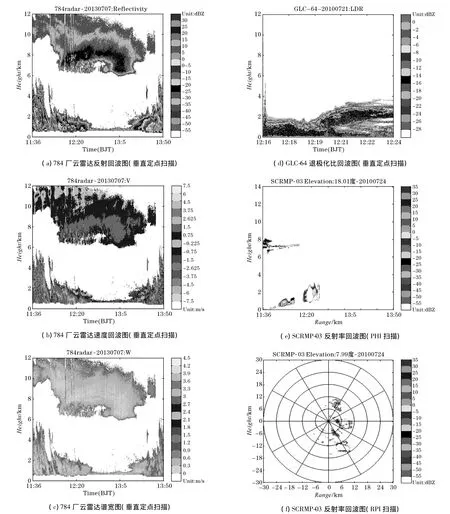
图8 3种型号雷达不同扫描模式下反射率、速度、谱宽、退极化比4种产品回波图
[1] 魏重,林海,忻妙新.毫米波气象雷达的测云能力[J].气象学报,1985,43(3):378-383.
[2] 吴举秀,魏鸣,周杰.94 GHZ云雷达回波及测云能力分析[J].气象学报,2014,72(2):402-416.
[3] Paulson W H,P J Petrochi,G Mclean.Operational utilization of the AN/TPQ-11 radar[J].Metereol.Mag,1994,93:337-346.
[4] Pasqualucci F.Millmeter-wave radar applications in Meteorology.Atmospheric Technology:Recent Progress in radar Meterology,Nat-Ionl Center for Atmospheric Research,1980,13.
[5] Hobbs P V ,N T Funk.Cloud andPrecipitation studies with amillimeter-wave radar,A Pictorial overvies[J].J.Atmo.OJ.Atmos.O-Ceanic Technol,1985,(2):35-38.
[6] 宋立雪.毫米波多普勒雷达RHI退速度模糊研究[D].南京:南京信息工程大学,2010.
[7] 仲凌志,刘黎平,葛润生.毫米波测云雷达的特点及其研究现状与展望[J].地球科学进展,2009,24(4):383-391.
[8] 樊雅文.云雷达资料订正及应用研究[D].南京:南京信息工程大学,2012.
[9] 盛裴轩,毛节泰,李建国,等.大气物理学[M].北京:北京大学出版社,2011:290-309.
[10] 楚志刚,银燕,顾松山.新一代天气雷达基数据文件格式自动识别方法研究[J].计算机与现代化,2013,215(7):180-184.
[11] 楚志刚,顾松山,王成刚.新一代天气雷达基数据兼容方法的分析[C].第27届中国气象学会年会雷达技术开发与应用分会场论文集.北京:中国气象学会,2010.
[12] 宗蓉.毫米波雷达资料分析与处理[D].南京:南京信息工程大学,2013.
[13] 王斌,肖艳姣,付志康,等.车载8mm测云雷达探测能力分析[A].暴雨新型探测资料应用技术研讨会论文集[C].2011.
[14] 谢蕾,刘黎平,姚雯.毫米波雷达与雨滴谱仪观测弱降水的对比分析[J].成都信息工程学院学报,2014,29(1):39-46.
[15] P Kollias,E E Clothiaux,M A Miller,et al.Millimeter-Wa-Velength Radars New Frontier in Atmospheric cloud and preciptitation research[J].AmericanMeteorlogicalSociety,2007,1608:1623.
[16] 苗子书.利用多普勒雷达速度谱宽资料分析谱宽[D].甘肃:兰州大学,2006.
