基于支持向量机回归建模的船舶磁场推算方法
2015-01-04唐剑飞刘胜道郑永良
唐剑飞,刘胜道,王 勇,郑永良
(1.中国舰船研究设计中心军事代表室,武汉 430064;2.海军工程大学电气工程学院,武汉 430033;3.中国人民解放军92267部队,山东青岛 266102)
0 引言
支持向量机(Support Vector Machines,SVM)是 Vapnik等人根据统计学习理论中结构风险最小化来实现实际风险的最小化原则提出的[1]。本文将支持向量机回归的理论和方法应用于船舶磁场推算,建立了关于船舶磁场的支持向量机预测模型,通过实验室有限点的测量磁场来推算其它位置的磁场,取得了很好的效果,且有很强的推广能力。
1 支持向量机
支持向量机最开始是用来解决关于模式识别的有关问题的。在模式识别中,选择训练数据的一些子集称为支持向量,从而发现具有推广能力的决策规则。最佳的支持向量等效于所有数据的分离。线性可分情况下的最优分类面衍生出支持向量机,其基本思想在形式上类似于一个神经网络,输出是中间节点的线性组合,每个支持向量对应于一个中间节点。
1.1 支持向量机基本思想
某线性函数存在于N维空间,在≤A的约束下,其VC维可能大大减小。即使在高维空间也可以得到较小VC维的函数集,从而能够有较好的推广性。当把原问题转换成其对偶问题后,计算的复杂度主要由样本数决定而不再取决于空间维数,这样,高维问题就能得到更好的解决[2]。
对非线性问题而言,通过一定的非线性变换x→φ(x),将原问题转换成高维空间的线性问题,如图1所示。虽然这种变换比较复杂不易实现,但是在上述对偶问题中,对于寻优函数或者分类函数都只涉及到样本之间的内积运算,这种内积运算可通过原空间的函数实现,我们不需要知道其变换的形式。只要一种核函数k(xi,xj)满足Mercer条件,就能对应某变换空间的内积。
1.2 核函数
目前,最常用的核函数有:
1)多项式核函数:

2)径向基(RBF)函数:

3)Sigmoid函数:

2 支持向量机回归算法
对于某未知函数y=f(x),x∈Rd,y∈R而言,要求函数f':Rd→R时,f和f'之间的距离

最小,则称为函数的逼近问题。其中L为惩罚函数。f未知,因此我们只能通过测量得到的样本回归来求得f'。
用线性回归函数f(x)=<ω,x>+b拟合样本数据,设所有训练样本在精度ε下无误差线性函数拟合,即:

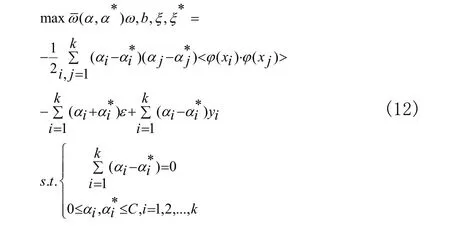
回归的估计问题即转换成约束条件下的最小化函数

式(7)的最小化是一个凸二次优化问题,引入拉格朗日函数:
其中α,α*≥ 0,γ,γ*≥ 0,i=1,2,...,k。式(7)的最优解即为(8)的鞍点,在此点L是关于ω,b,ξ,ξ*的极小点,是关于α,α*,γ,γ*的极大点,求(8)的最小即可转换为求
的最大问题。
L在鞍点处是关于ω,b,ξ,ξ*的极小点,故可得到:
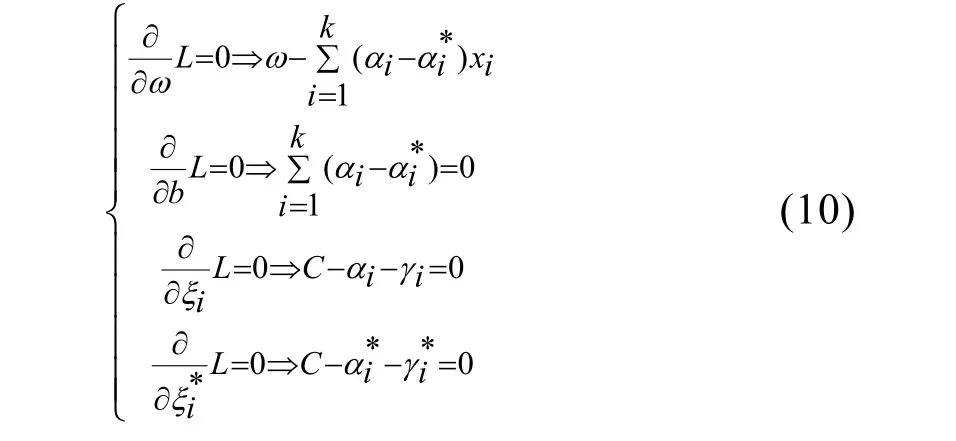
将(10)代入到(8),可得:
对于非线性回归,用一个非线性映射x→φ(x)将样本数据映射到一个高维特征空间,从而进行线性回归,从而得到原空间非线性回归的效果,式(11)转化为:
引入符合 Mercer条件的核函数
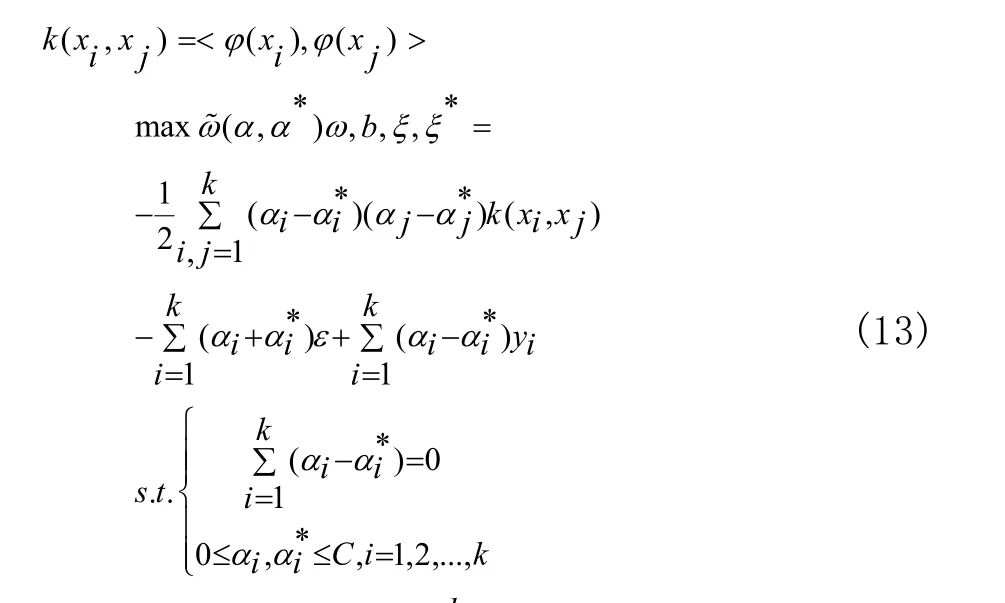
其中:

记 <ω,x>=ω0,函数f(x)可表示为

由K-T条件,鞍点处下式成立:
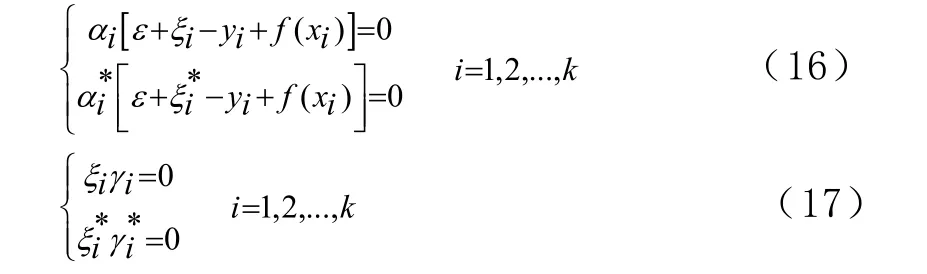

由(18)知,当=C或=C时,f()与的误差可能大于ε,对应∈(0,C)或者∈(0,C)的f()与的差等于ε即=0或者=0,因此有:
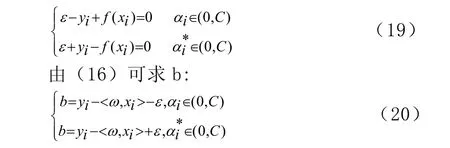
支持向量即与0、0对应的样本,也就是在不灵敏区域边界上或外面的样本,有:

其中SVs表示支持向量集。
基于结构风险最小化的支持向量回归预测方法,不但考虑了样本的复杂性同时也考虑了样本的拟合性,有很好的外推预测能力。但是在整个建模的过程中,损失函数参数ε、惩罚因子C、核函数等模型参数的选择比较困难,一般依靠经验及测试[3]。
3 支持向量机的回归建模在船舶磁场推算中的应用
近年来,磁场建模方法在船舶磁场推算中得到了广泛研究且取得了较多成果。用于船舶磁场推算的数学模型主要有两类:一类是依据严格的理论推导出来的,如大平面法、边界元法等,其计算精度高,但需要整个场域边界上的磁场数据,对测量要求较高;另一类是磁体模拟法,它基于在物体若干测量点处产生磁场的相似性,将整个物体磁场等效为若干分布于船舶所占空间内的模拟体的磁场,其只需少量的磁场测量数据,但缺乏理论上的严密性[4-7]。SVM 对于船舶周围磁场的推算在实际运用中还是第一次,取得了一定的效果。
实验过程如下:
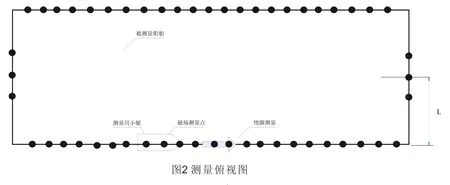
1)选取合适的船舶模型、若干磁探头及磁场测量设备。考虑到小艇与船舶的大小的相对比例问题,选择的测量点少了,得到的数据较少,那么通过计算最后得出的结果可能误差偏大。而选择的测量点过多,可能对实船测量造成比较大的困难。因此,我们选择两舷外共2*23点以及舰首舰尾共2*3个点进行测量,最终得到52个点的三分量磁场数据。
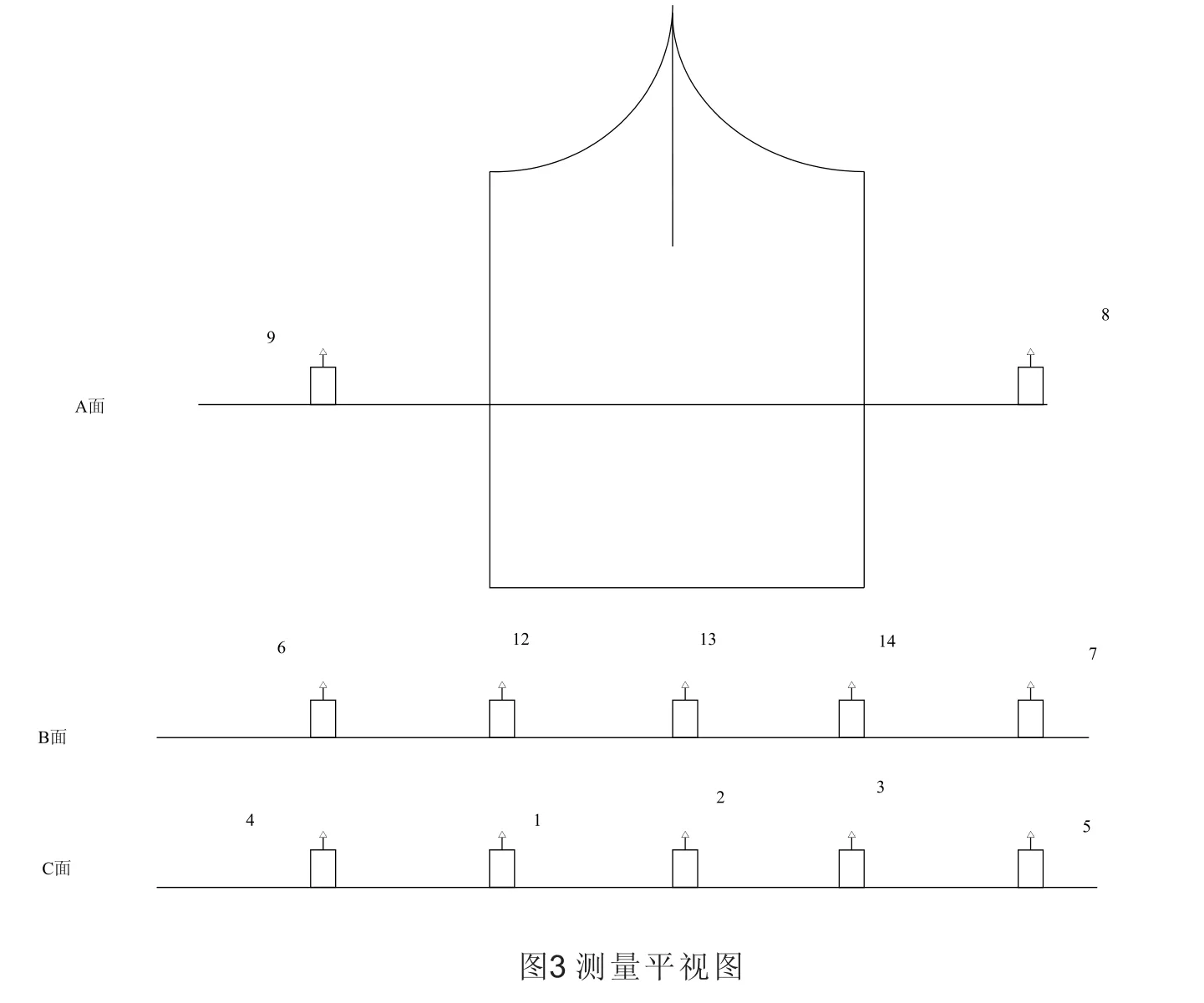
2)将8、9两个磁探头放置于船舶两舷外距离船体中心L处,测量舷外磁场,模拟小艇的测量位置。 1、2、3三个磁探头放置于船舶正下方一船舯宽处,测量标准测量面上的磁场强度。10、11两个磁探头放在离实验器材较远且周边没有磁性物体位置,以监测周边环境磁场变化。
3)由南至北推动船舶,随着第一个点到最后一个点,由相对位置的变化模拟小艇的旋转一圈的测量过程。随后,将三个磁探头置于舰首,三个磁探头置于舰尾,模拟小艇绕船舶转圈时,转到舰首舰尾位置后对船舶磁场的测量过程,测量示意图如图2和图3所示。
4)继续进行两次实验,两次实验过程中将两个舷外的磁探头调整距离,从而模拟当转圈半径变大时,小艇上测量设备对船舶三分量磁场的测量过程。
5)数据处理,将两个监测磁探头所测得的干扰磁场消除。
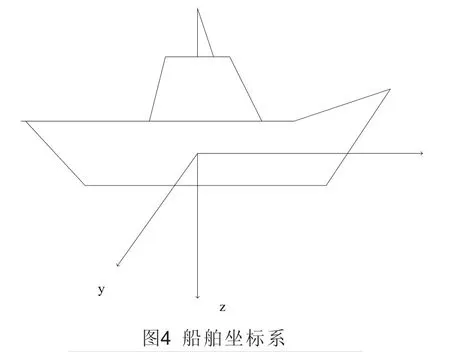
以船舶几何中心为原点,建立空间直角坐标系,舰尾指向舰首方向为X轴正方向,左舷指向右舷方向为Y轴正方向,竖直向下方向为Z轴正方向,如图4所示。
通过测量的数据,使用支持多变量回归的支持向量机回归软件,对船舶下一倍船舯宽的面的磁场强度进行推算。
选择BSVM工具箱,因为我们这里用到三个变量的回归,使用 EXCEL的宏工具将数据设置成label index:value index2: value index3: value index4格式并保存到 TXT里,保存文件名“train.txt”点击“input file”把数据导入BSVR软件,输入 100的运行数,点击“Optimize”,检查“input-opt.csv”并注意哪些参数产生的MSE较低。计算发现,当松弛因子C为1,epsilon为0.1,选择dot为核函数时,相对误差最小。
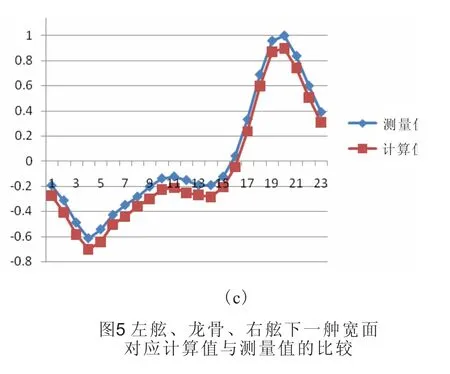
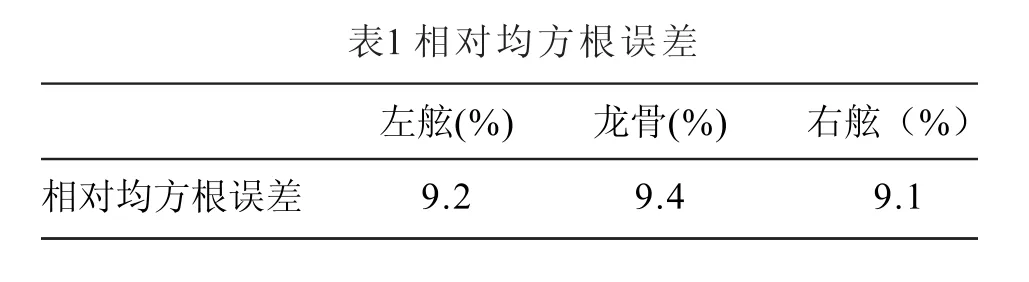
使用这些参数对标准测量面上的磁场值进行回归预测,得到的预测值与测量值比较曲线如图5所示,图中数据作了归一化处理。其相对均方根误差如表1所示。
4 结束语
本文通过支持多变量回归的支持向量机回归软件,以实验室得到的磁场数据为样本,通过不断的测试找到最优的参数。设置好软件参数,再通过样本预测船舶下一舯宽距离的面的磁场。将预测磁场与实际测量磁场相比较,预测误差在10%以下,满足工程应用要求,这对于未来支持向量机在船舶磁场推算上的研究有着重要意义。

?
[1]杨志民,刘广利.不确定性支持向量机原理及应用[M].北京:科学出版社,2007:55-57.
[2]白鹏,张喜斌,刘君华.支持向量机理论及工程应用实例[M].陕西:西安电子科技大学出版社,2008:13-15.
[3]邓乃扬,田英杰.支持向量机理论、算法与拓展[M].北京:科学出版社,2009:63-79.
[4]周耀忠,张国友.舰船磁场分析计算[M].北京: 国防工业出版社,2004: 135-136.
[5]王金根,龚沈光,刘胜道.磁性目标的高精度建模方法[J].海军工程大学学报,2001,13(3)49-52.
[6]刘胜道,刘大明,肖昌汉等.基于遗传算法的磁性目标模型[J].武汉理工大学学报,2008,32(6):1017-1020.
[7]刘胜道,肖昌汉,周国华等.潜艇闭环消磁中外部空间的磁场推算[J].海军工程大学学报,2012,24(1):31-34.
