一种基于钟形函数的变步长LMS算法
2015-01-04苟川杰何方敏
苟川杰,李 毅,何方敏,高 鑫
(海军工程大学舰船综合电力技术国防科技重点实验室,武汉 430033)
0 引言
在舰艇、飞机等有限空间舱室内,当发射机与接收机同时工作,由于空间耦合,接收机接收信号中混有本地发射机强干扰信号,强干扰信号会超出接收机晶体管器件的工作范围,严重时可能烧坏接收机器件[1]。利用LMS算法自适应滤波技术可以有效地消除接收信号中的强干扰信号。最陡下降法是一种常用的LMS算法,沿着均方误差的负梯度方向搜索最优滤波系数,以达到均方误差最小意义下的最优滤波。实际信号处理中,通常使用瞬时误差的平方e(n)2来代替均方误差E(e(n)2),称为随机梯度法,其最终得到滤波器系数也将围绕最优滤波系数随机游动[2]。
固定步长的LMS算法存在着收敛速度与稳态误差的矛盾,而变步长LMS算法(简称VSLMS算法)能有效解决这个问题,其思想是在迭代初期误差较大,使用大步长加快收敛速度;在稳态时误差较小,使用小步长减小稳态误差。文献[3]介绍了一种利用瞬时误差来调整步长的VSLMS算法,能有效提取强干扰信号中的弱信号。文献[4-6]分别介绍了几种通过建立步长与瞬时误差函数来调节迭代步长的算法。
本文提出了一种基于钟形函数的VSLMS算法,该算法能同时保证高收敛速度和小稳态误差。通过与固定步长LMS算法和文献[3]中算法比较,验证了本文算法在收敛速度与稳态误差上的优越性。
1 现有的几种LMS算法
1.1 LMS算法与干扰消除
自适应滤波技术应用于干扰消除的基本原理如图1所示。接收信号由有用信号s(n)和强干扰x1(n)叠加,干扰取样x0(n)与强干扰x1(n)是同一信号源(如本地发射机)经过不同信道产生的相关信号。对于 FIR 滤波器,输出信号y(n)=ωTX(n),其中ω是滤波器抽头系数,X(n)是n时刻输入信号矢量:
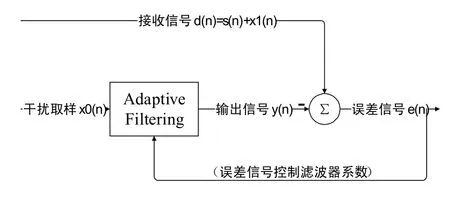
图1 基于自适应滤波技术的干扰消除原理图

式中:
M为滤波器抽头数。误差信号为e(n)=d(n)-y(n)=s(n)+x1(n)-y(n),在最小均方误差意义下,y(n)是对接收信号中强干扰x1(n)的估计,因此误差信号e(n)就是对有用信号s(n)的估计。
维纳滤波器是最小均方误差意义下的最优滤波器,但是需要知道信号的统计特性,并且需要计算矩阵求逆,运算量大,不适用于实时信号处理。常用最陡下降法通过迭代使滤波器系数收敛到最优解,其迭代公式为

为了使算法收敛,固定步长μ应满足
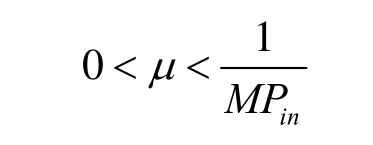
Pin为滤波器输入信号的功率[2]。固定步长 LMS算法存在收敛速度与稳态误差的矛盾,大步长收敛快,但是稳态误差大;小步长可以减小稳态误差,但是收敛慢。
1.2 VSLMS算法
固定步长LMS算法存在上述缺陷,而变步长LMS算法能弥补该缺陷。目前提出的VSLMS算法很多,如文献[3,6]。VSLMS算法的核心思想是在误差较大时利用大步长,在误差较小是利用小步长,以提高收敛速度并同时减小稳态误差。
文献[3]提出了一种常用的 VSLMS算法,该算法利用瞬时误差控制迭代步长的。其滤波器系数迭代公式为

步长迭代公式为
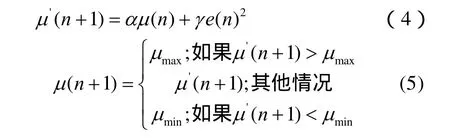
其中记忆因子0<α<1,误差影响因子γ>0,μmax与μmin分别是能保持 LMS算法收敛的最大限定步长与满足收敛速度下限的最小限定步长。
文献[4]提出了一种基于抽样函数的 VSLMS算法,步长与瞬时误差的关系式为

该算法能很好解决收敛速度与稳态误差的矛盾,并获得较小的稳态误差。
2 基于钟形函数的VSLMS算法
2.1 算法分析
建立迭代步长与瞬时误差之间满足钟形函数曲线,公式如下式,

钟形函数曲线存在上界,当瞬时误差较大时,迭代步长能够自动逼近最大限定步长,提高收敛速度;同时当瞬时误差较小时,迭代步长趋近于0,能够减小稳态误差。
在强干扰消除应用中,自适应滤波之后的误差信号就是对接收信号中有用信号的估计,在理想情况下,误差信号的幅值满足,因此误差信号幅值跨度较大。自适应滤波稳态时滤波器系数变化越小,系统稳定性越好,因此要求在稳态时迭代步长足够小,并且迭代步长随着误差信号变化尽量小。对于文献[3]中算法,步长对误差的变化率为:
当误差趋近于0时,该变化率是误差的一阶无穷小量。对于文献[4]中算法,变化率为:

利用泰勒级数求无穷小阶数,如下式:
所以变化率是误差的一阶无穷小量。对于钟形函数曲线变化率为

当误差趋近于0时,变化率是误差的b-1阶无穷小量,所以取b≥3时,钟形函数曲线相对于文献[3]的算法具有更小的稳态误差。从图2能够直观看出相比于抽样函数曲线,钟形函数曲线(b≥3)在误差较大时不存在振荡,具有更加稳定的步长;在误差较小时钟形函数具有更小的步长,同时步长随误差变化更小,这使得自适应滤波具有更小的稳态误差。
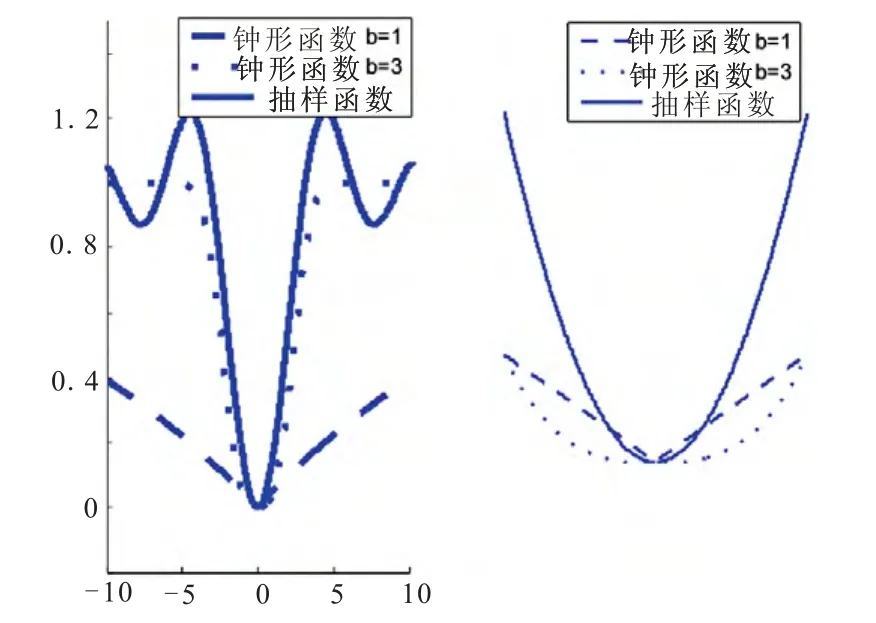
图2 抽样函数曲线与钟形函数曲线对比
2.2 参数选取
在本文提出的算法中,参数μmax、a、b的选取决定了算法的性能。μmax是钟形函数的上界,所以μmax理论上可以选择使固定步长 LMS算法收敛的最大步长,在仿真和实际应用中,μmax选择应满足:
a与b决定了函数曲线的形状,影响收敛速度和稳态误差。b决定了小步长与大步长之间过渡带的坡度,b越小,过渡带步长变化越慢,曲线越平缓;b越大,过渡带步长变化越快,曲线越陡峭。过渡带过于平缓降低了步长对误差的敏感度,从图3(上)可以看出,当误差达到6,对于b取值大于3,步长收敛到μmax,而对于b取值小于3,步长小于μmax,因此b取值会直接影响步长从而影响收敛速度,一般b取值越大,收敛越快。过渡带过于陡峭增加了步长对误差的敏感度,从图3(上)可以看出当误差从1变化到2,对于b取值为5和6,步长由接近0变化到接近μmax,而对于b取值小于4,步长变化幅度较小,因此b取值同样会影响稳态时滤波器系数的变化,从而影响稳态误差。综合考虑收敛速度和稳态误差,b取值应适中。a决定了小步长的误差范围(如图3(下)),从而决定了系统稳态范围。干扰抵消的误差信号是对接收信号中有用信号的估计,其幅值在一定范围内变化,可以根据有用信号的强度来选择a。a过小使系统误差很大时迭代步长趋近于 0,从而增大了稳态误差;a过大使系统误差较小时仍有较大的迭代步长,从而造成振荡,增大了稳态误差。在下文的仿真中,可以直观看到a与b取值对收敛速度和稳态误差的影响。
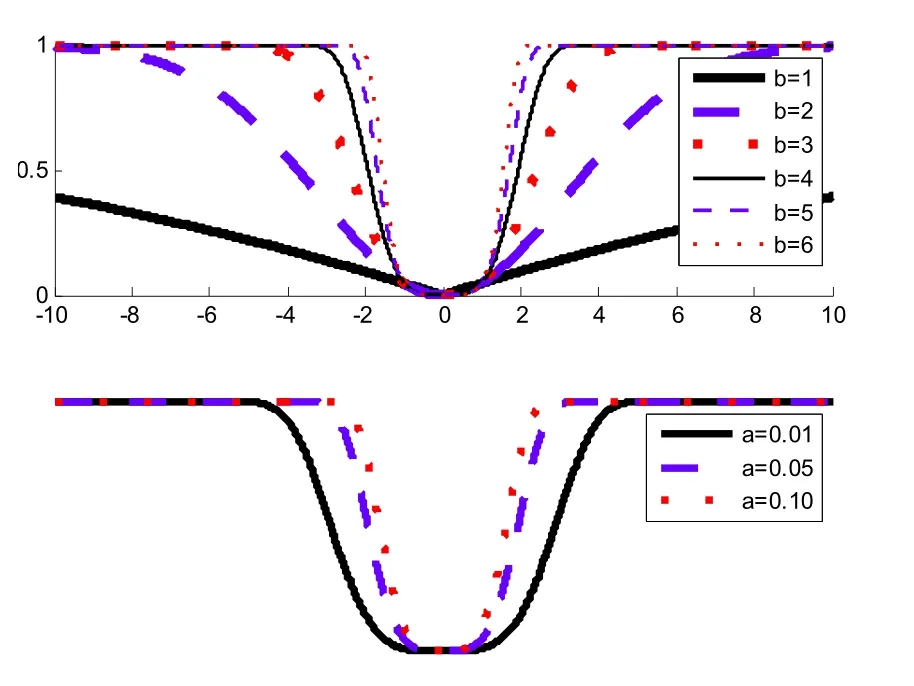
图3 a与b取不同值钟形函数曲线对比
3 仿真结果及分析
仿真主要对比了本文算法、固定步长 LMS算法和文献[3]中算法的性能,同时比较了a与b取不同值对干扰消除性能的影响。
仿真有用信号为s(n)=1.2sin(0.075πn),干扰信号由v(n)=8(sin(0.15πn)+N(n))经信道1(耦合信道)产生并叠加到s(n)上,其中N(n)是白噪声,v(n)经信道 2(采样信道)进入自适应滤波器的输入端。误差信号e(n)就是有用信号的估计e(n)=(n),用[s(n)-e(n)]2作为衡量滤波性能的标准。
图4是本文算法与固定步长LMS算法的性能对比,可以看出:当固定步长 LMS算法取最大限定步长时,最陡下降法具有理论上的最快收敛速度,本文算法能够达到最快收敛速度,并且能大大减小稳态误差;当固定步长 LMS算法步长小于最大限定步长时,稳态误差减小,而本文算法仍具有更小的稳态误差并且收敛时间更短。可以看出基于钟形函数的 VSLMS算法相比传统LMS算法在收敛速度和稳态误差上性能占优。
图5是本文算法与文献[3]中算法的性能对比,可以看出,两者具有相同的收敛速度,而本文算法具有更小的稳态误差。
因此,基于钟形函数的VSLMS算法在收敛速度和稳态误差上具有良好的性能。下文将通过仿真分析参数a与b选取对算法性能的影响。
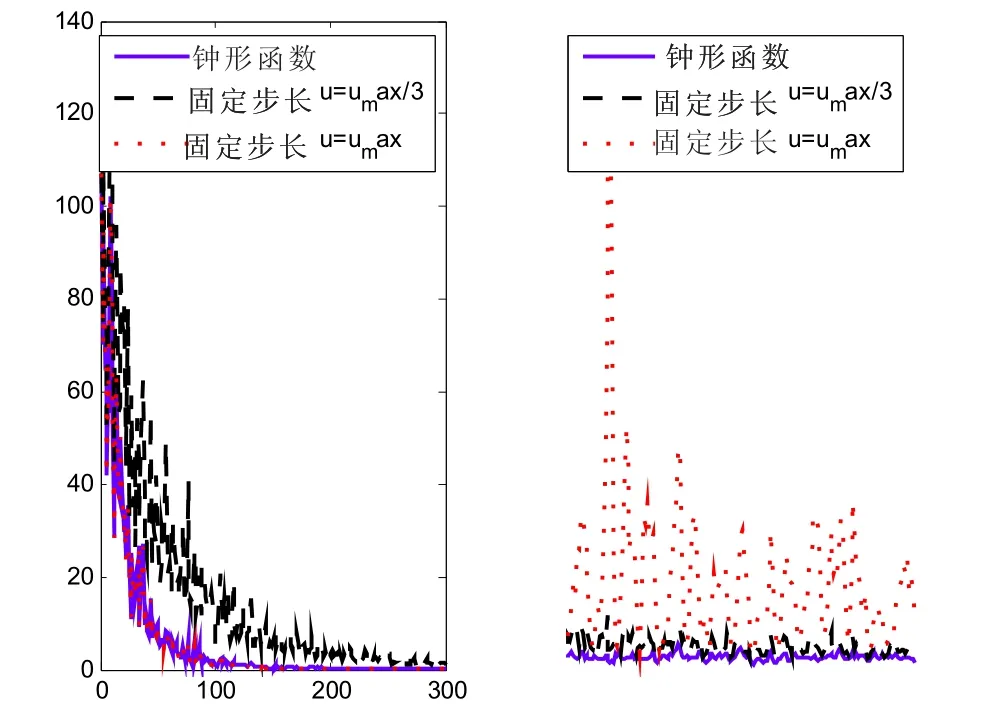
图4 本文算法与 L MS算法性能对比
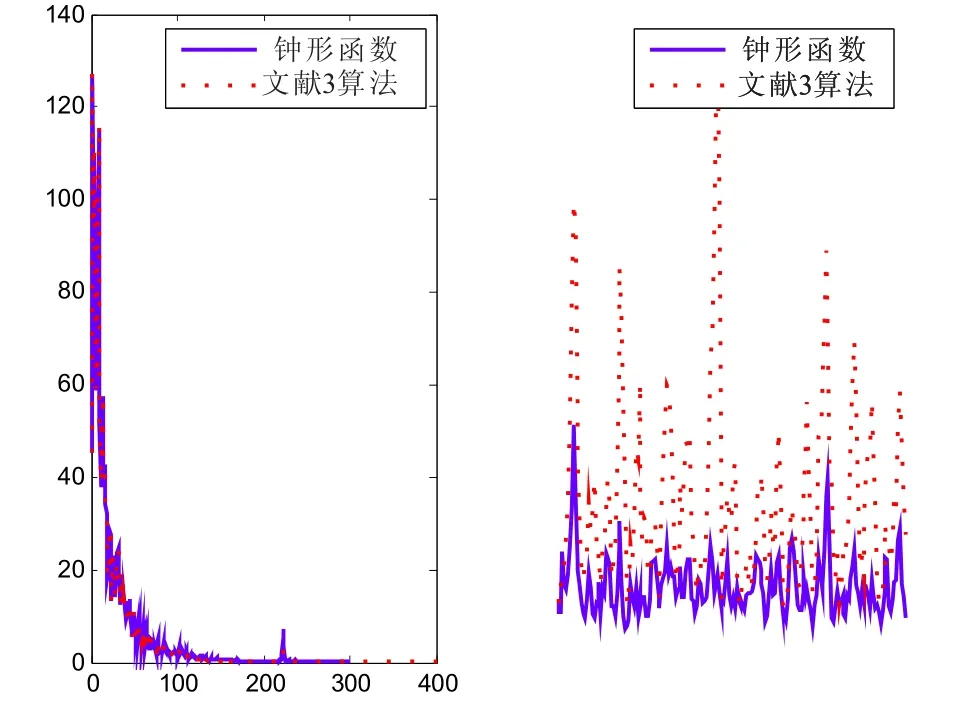
图5 本文算法与文献[3]算法性能对比
图6是b取不同值对算法性能的影响,可以看出,b取值越大,算法收敛速度越快,b取不小于4的值,算法能达到最快收敛速度;b取值越小,收敛速度越慢;b取值过大或者过小都会增大稳态误差,当b取1时,基于钟形函数VSLMS算法比固定步长LMS算法稳态误差更大。
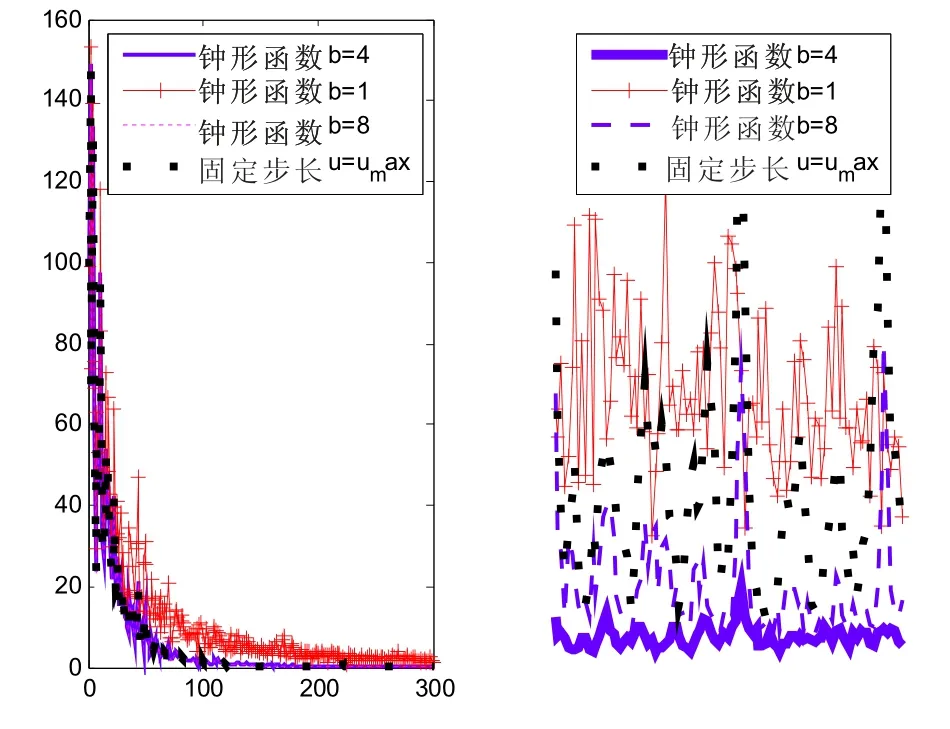
图6 b取不同值对算法性能的影响
图7是a取不同值对算法性能的影响,可以看出a取值对算法收敛速度基本没有影响,对稳态误差影响较大,a取值过大或者过小都会增大稳态误差。
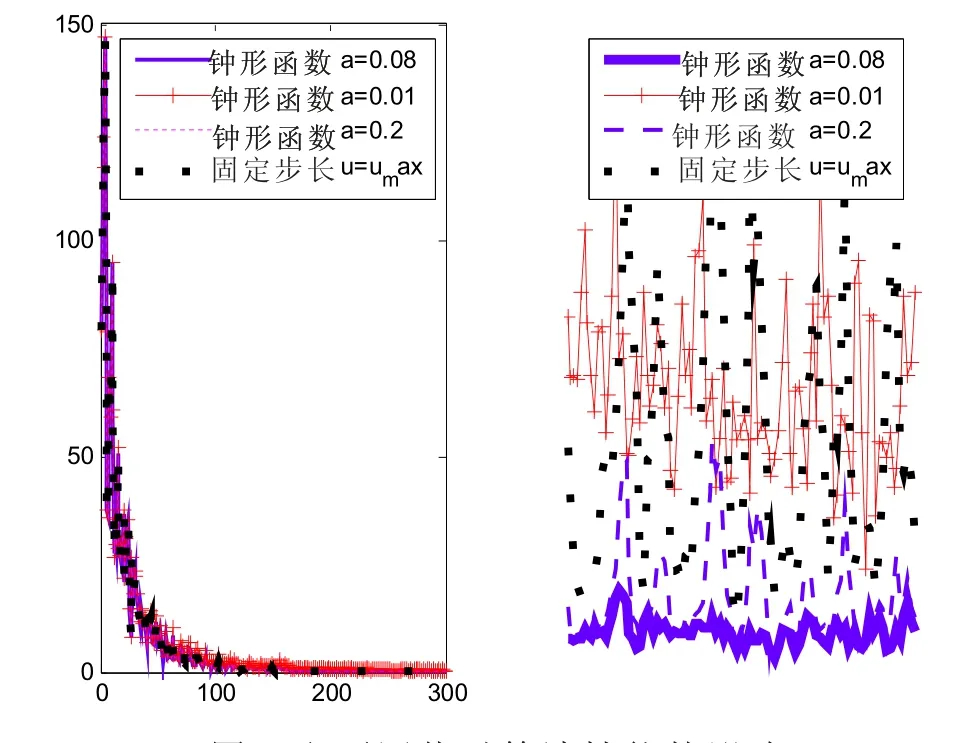
图7 a取不同值对算法性能的影响
从仿真结果可以看出,参数a与b选取对算法性能的影响与前文分析一致。选择性能较优的一组参数a=0.08,b=4,得到干扰消除的结果如图8所示,收敛速度快,干扰消除效果好。
4 结束语
本文以对接受信号中强干扰信号消除为背景,提出了一种基于钟形函数的变步长 LMS自适应滤波算法,并对比研究了固定步长 LMS算法和其他VSLMS算法,分析了本文算法的优点以及参数选取对算法性能的影响,最后通过仿真验证了分析。
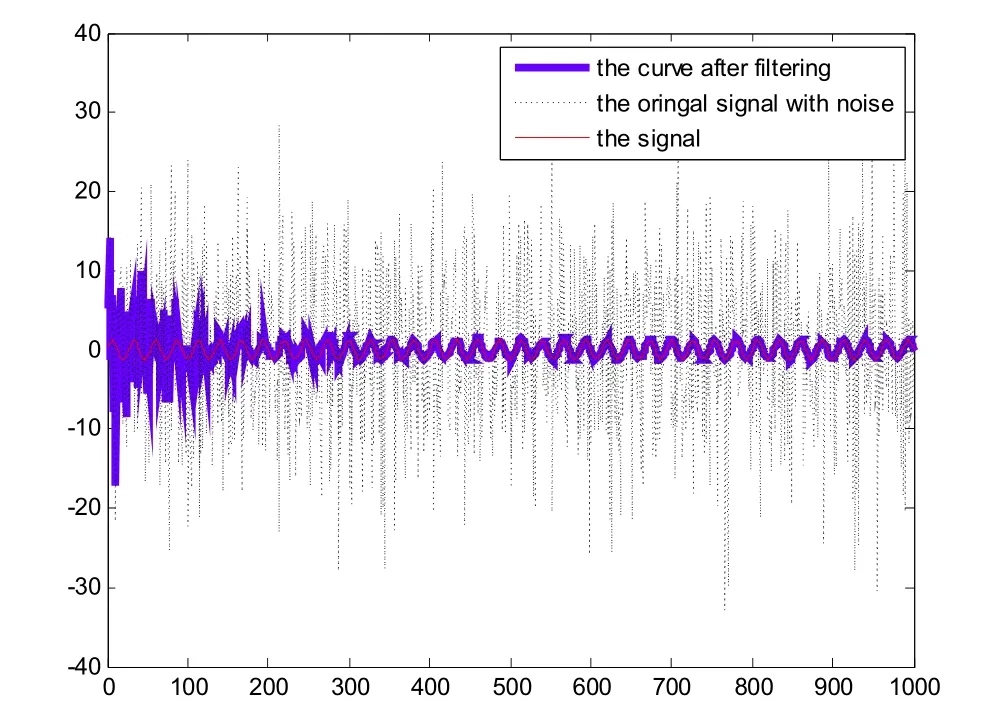
图8 干扰消除结果
基于钟形函数的 VSLMS算法能很好解决收敛速度与稳态误差的矛盾,在保证自适应滤波算法快速收敛的同时减小了稳态误差,有很大的应用前景。
[1]郑伟强,杜武林.自适应干扰抵消研究.电讯技术,1991.
[2]吴正国,尹为民,侯新国,欧阳华.高等数字信号处理.机械工业出版社,2009.
[3]Raymond H Kwong,Edward W Johnston.A variable step size LMS algorithm[J].IEEETransactions onSignal Processing,1992.
[4]詹国强,吴正国.一种新的变步长LMS自适应滤波算法.海军工程大学学报,2006.