船载便携式水位突变预警仪研制
2015-01-03刘元东许光祥雷鹏华
蔡 创,刘元东,许光祥,雷鹏华
(重庆交通大学河海学院,重庆 400074)
船载便携式水位突变预警仪研制
蔡 创,刘元东,许光祥,雷鹏华
(重庆交通大学河海学院,重庆 400074)
针对因水电站黑起动等特殊运行工况引发的水位突变,使所在水域停泊的船舶易发生翻沉、搁浅等情况,开发并研制出了船载便携式水位突变预警仪。该预警仪以单片机为控制核心,由温度测试电路、超声波发射接收电路、数据显示电路及报警电路组成,可实时监测船舶干舷高度、横倾斜度及所在水域的水位变率。当船舶所在水域水位发生突变且船舶干舷高度、横倾斜度及水位变率中任一项或全部超过了安全限值,预警仪会自动发出警报,同时,将这3个值的变化情况及时反馈给船员,警示船员调整船舶姿态,从而能更好地保证停靠船舶在水位突变情况下的安全。相对于传统预警系统,该预警仪具有造价低、体积小、质量轻、安装简便等优点,可以广泛应用于水位突变预警及其所在水域行进或停泊船舶的安全监控。
船载;单片机;超声波传感器;水位;预警仪
2015,32(11):136-140
1 研究背景
随着我国水利水电建设的发展,越来越多的水电站不断建成并投入使用。虽然水电站可调节河道枯期流量,并在一定程度上改善船舶的通航条件,但因其黑启动、泄洪或关闸所导致的下游水位突然上涨或下降,会给下游船舶的航行、停靠、作业等带来巨大的安全隐患,甚至可能引发事故。当水电站下游水位发生突变而可能危及停靠船舶的安全时,如何采取有效措施将此隐患消除或将其危害程度降低到最小,针对该问题,本文研制了船载便携式水位突变预警仪。该预警仪安装于船舶上,可实时地监测船舶干舷高度、横倾斜度及所在水域的水位变率,当水位发生突变时,船员可以根据预警仪显示的数据和给出的警示,及时调整船舶姿态,从而能避免船舶发生翻沉、搁浅等危险。
在利用超声波进行河道水位测量方面,国内已有一定的研究成果,但其大部分是将超声波水位仪固定于岸、坝或其它地方对河道水位进行监测[1-6],其主要目的是为河流航道的规划布置等提供数据依据。将超声波水位仪安装在船舶上用于河道水位监测及船舶安全监测,目前还不多见。而船载便携式水位突变预警仪的研制就弥补了这一不足。该预警仪因其造价低、体积小、质量轻、装载方便,可以广泛应用于各类船舶。
2 系统原理
2.1 系统工作原理
船载便携式水位突变预警仪装载于船上,可实时对船舶所在水域水位进行监测。预警仪会先通过超声波传感器将测得的水位信号转换成电信号,经滤波、放大、整形转换为数字信号后传输给单片机,再经单片机对数字信号进行处理,最后得到船舶干舷高度、横倾斜度及所在水域的水位变率。然后预警仪会通过数码管显示电路将船舶的倾斜度予以显示,若水位变率、船舶的干舷高度及倾斜程度中有一项或全部超过了船舶安全限值,预警仪会发出警报,提示船员提前对船舶做好应对措施,从而能更好地保证船舶安全。超声波水位探头的安装原理,以及船舶干舷高度、水位变率、船舶倾斜度的计算原理如下。
2.1.1 超声水位探头安装
如图1所示[7],将超声波水位探头安装于船舶左、右舷上。其中,左、右干舷安装高度dL和dR及两探头中心间距S可直接量得。
2.1.2 干舷高度的计算
由超声波水位探头可测出水面距探头的距离hL和hR,再由单片机按公式计算出左、右干舷高TL和TR:

图1 船载便携式水位突变预警仪测水位原理图Fig.1 Schematic diagram of measuring water level by portable onboard pre-alarming apparatus

当干舷高TL≥T0或TR≥T0或2者皆出现时(T0为船舶干舷高度安全限值),预警仪报警,船员可据此及时调整船舶姿态。
2.1.3 水位变率的计算
船载便携式水位突变预警仪会连续不断采集水位,同时会计算出设定的时间间隔Δt内干舷高度的变化值Δh,并由单片机按公式计算出水位的变化速率u,即

当实际水位变率u≥u0时(u0为船舶水位变率的安全限值),预警仪报警,船员可据此及时调整船舶姿态。
2.1.4 船舶横向倾料度的计算
根据左、右干舷高TL和TR及探头的安装间距S,单片机可按公式计算出船舶的横向倾角θ,即

当实际横倾角θ≥θ0时(θ0为船舶倾斜角安全限值),预警仪报警,船员可据此及时调整船舶姿态。
2.2 超声波测水位原理
如图2所示[8],本预警仪采用40A25TR-1型超声波传感器测水位,其测试原理是:通过脉冲信号激励发射端发出超声波信号,同时开始计时,超声波经过被测液面后,形成反射波,返回到接收端,接收端收到信号的同时停止计时,再根据超声波在介质中的传播速度可计算出超声波传播路径的长度,从而得到探头与水面之间的距离[9]。最后根据超声波水位探头的安装高程,即可计算得到所测水面的绝对高程。
从图2可见,探头和水面之间的垂直距离为h,声波从探头到水面的传播路径长度为L,则有

图2 超声波测量水位示意图Fig.2 Schematic diagram of measuring water level with ultrasonic wave

式中:v为超声波在空气中的速度(补偿后);t为传播时间。从而可算得探头与水面之间的垂直距离为

本系统中采用的是收发一体的超声波探头,所以收发端很近,即D很小,与h和L相比可忽略,h与L近似相等,即有

再设探头的安装高程为z0,由此便可获得水位的绝对高程z,即

2.3 超声波波速补偿原理
因为超声波的传播速度容易受空气温度、空气湿度、大气压强等因素的影响,所以要得到更为精确的测量结果,还需根据实时的环境温度,对超声波的速度进行补偿校正。因为温度影响最大,所以预警仪主要考虑了空气温度对波速的影响。温度T与波速v的关系为

可见,只要测得空气温度T,即可获得较为准确的超声波速度。
预警仪采用以DS18B20温度传感器为核心的温度测试电路来测量环境温度,然后将实时采集的温度值通过DS18B20的数据总线输入单片机,从而实现对超声波速度的校正。
2.4 系统安全限值的确定
对于不同的船舶,它们对应的干舷高度安全限值、水位变率安全限值及横向倾斜角安全限值是不同的,所以,这里要从船舶自身的稳定性出发来分析不同船舶都普遍适用的安全限值确定方法。船舶的横向截面如图3所示,从图中我们可以推导得出船舶在发生横倾时的扶正力矩公式,过程如下:
在图3中,WL为船舶倾斜前的水位线,W′L′为倾斜后水位线,G点为船舶的重心,A点为船舶倾斜前的浮心,A′为船舶倾斜后的浮心,P为重力,b为重心G在浮心A以上的高度,θ为船舶横倾角。
由图3可得船舶扶正力臂为
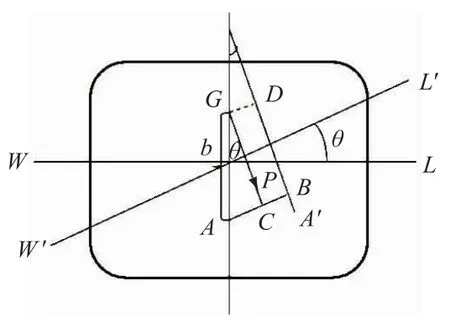
图3 船舶横倾横截面Fig.3 Cross-section of ship inclination

从而可得到重力和浮力所形成的扶正力矩值,即

由扶正力矩M与横倾角θ的关系式可以得到船舶的静稳曲线,如图4所示。
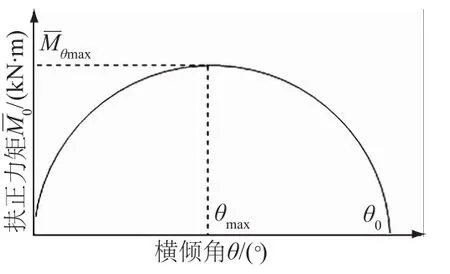
图4 船舶静稳曲线Fig.4 Curve of static stability of ship
由船舶的静稳曲线,可以看出当船舶的横倾角在达到θ0之前,船舶扶正力矩为正值,船舶可以靠扶正力矩恢复平衡;而当船舶横倾角达到θ0时,船舶的扶正力矩为零,说明此时船舶已经没有恢复平衡的能力,即当横倾角达到θ0后,船舶会发生倾翻[11-12]。从而我们可以根据各船舶具体的静稳曲线来确定船舶在停靠时其对应的干舷高度、水位变化率及横倾角的安全限值。
3 系统研制
研制的预警仪是采用DS18B20温度传感器实时采集温度数据,通过由P1.2管脚控制的数据总线输入STC89C52单片机,单片机可按式(9)计算得到修正后的波速。然后预警仪会通过单片机P1.0管脚定时驱动555定时器同时分别向安装在船舶左、右船舷的40A25TR-1型超声波传感器发出40 kHz的脉冲信号驱动传感器发射端发出超声波,同时单片机会触发其内的T0和T1计时器开始计时(其中T0为左船舷传感器计时、T1为右船舷传感器计时),当发出的超声波返回传感器接收端后,超声波接收器会将声波信号调制为电压信号,经放大电路、滤波电路及比较电路转换为数字信号后,分别从P1.3和P1.4端口输入单片机,单片机检测到该信号后会分别暂停左、右船舷对应计时器的计时。
得到2个计时后,单片机会自动按式(7)分别计算出左、右探头距水面距离hL和hR,再分别按式(1)、式(2)计算出左、右的干舷高度TL和TR。若2个干舷高度有一个或都超过了安全限值,预警仪会通过P2.0端口触发报警电路报警。单片机按式(4)计算得到船舶的倾斜度后,会从P0.0—P0.7端口经译码器在数码管上显示,若船舶的倾斜度超过了安全限值,预警仪也会通过报警电路报警。
每当单片机P1.3和P1.4都收到信号后,单片机都会重新计算获得实时的波速并从P1.0管脚发出脉冲信号,同时2个计时器也会清零重新开始计时,如此不断循环。计时器计数次数每达到10次,单片机都会计算出该10次前后总的干舷高度差和总的时间差,再按式(3)计算出水位的变率,若水位的变率超过了安全限值,预警仪会通过报警电路警示。
预警仪的具体工作原理流程如图5所示。

图5 船载便携式水位突变预警仪工作原理流程Fig.5 Block diagram of working principle of the portable onboard pre-alarming apparatus
根据船载便携式水位突变预警仪的工作原理流程框图进行了程序设计,程序流程如图6所示。

图6 船载便携式水位突变预警仪程序流程Fig.6 Program flow chart of the portable onboard pre-alarming apparatus
可以看出该预警仪的组成及程序计算过程相对来说是比较简单的,但该预警仪与传统预警系统相比所具有的优势主要体现在它是一个便携式的水位突变预警仪,其不仅质量轻、体积小,而且造价低、安装操作简便,可被广大普通百姓、渔民所接受。其次,预警仪考虑了温度对超声波波速的影响,且后续所有计算都是由事先设定的程序自动完成,因此船载便携式水位突变预警仪的测量精度相对是较高的,可以广泛应用于水位突变预警及其所在水域行进或停泊船舶的安全监控。
4 结 语
本文基于单片机的船载便携式水位突变预警仪,实现了水位的实时采集、提取、处理及显示,并可及时地发出警报,提示船员船舶处于危险状况,基本实现了在河流水位突变情况下的预警。但在该预警仪的研制中没有考虑外界空气湿度、大气压强等可能会给预警仪测量带来的误差,所以预警仪测量水位的精度还有待进一步的提高,进而可与其它相关的补偿系统组成更为严密的船载水位突变预警系统。
[1]胡金龙,莫晓聪,高祥涛,等.基于不同遥测终端的水文自动测报系统研究[J].长江科学院院报,2013, 30(10):118-122.(HU Jin-long,MO Xiao-cong,GAO Xiang-tao,et al.Automatic Forecasting System Based on Different Hydrologic Telemetry Terminal[J].Journal of YangtzeRiverScientificResearchInstitute,2013, 30(10):118-122.(in Chinese))
[2]吕永军,徐建民,金冬梅.超声波水位计在鹤立水文站中的应用[J].黑龙江水利科技,2011,39(1):145-146.(LV Yong-jun,XU Jian-min,JIN Dong-mei.The Application of Ultrasonic Water Level Gauge in Heli Hydrological Station[J].Heilongjiang Water Conservancy Science and Technology,2011,39(1):145-146.(in Chinese))
[3]凌胜军,李育红.大峡水电站全厂水位测量装置的改造[J].西北水力发电,2012,21(6):127-128.(LING Sheng-jun,LI Yu-hong.The Transformation of the Whole Plant Water Level Measuring Device in Daxia Hydropower Station[J].Northwest Hydroelectric Power,2005, 21(6):127-128.(in Chinese))
[4]杨 云,钱 卫,洪 浩,等.三峡电站水位测量及水头处理分析[J].水电站机电技术,2011,34(6):42-44.(YANG Yun,QIAN Wei,HONG Hao,et al.The Analysis of the Water Level Measurement and Water Head Management of Three Gorges Power Station[J].Mechanical&Electrical Technique of Hydropower Station,2011, 34(6):42-44.(in Chinese))
[5]严怀龙.超声波水位测距仪的设计[J].测试技术与控制,2011,36(3):31-33.(YAN Huai-long.Design of Ultrasonic Water Level Range Finder[J].Testing Technology and Control,2011,36(3):31-33.(in Chinese))
[6]吴新生,林木松,廖小永,等.深圳河口潮汐模型变频生潮与量测控制系统[J].长江科学院院报,2010, 27(4):6-10.(WU Xin-sheng,LIN Mu-song,LIAO Xiao-yong,et al.Tide Generating with Converting Frequency and Measurement Control System for Shenzhen Estuary Tidal Model[J].Journal of Yangtze River Scientific Research Institute,2010,27(4):6-10.(in Chinese))
[7]汪伯涛,许光祥,蔡 创,等.水电站泄水波对船舶的影响及水位突变预警系统研究报告[R].重庆:重庆市港航管理局,重庆交通大学,2012.(WANG Bo-tao,XU Guang-xiang,CAI Chuang,et al.Report on the Influence of Discharging Wave on Ship and the Development of Early Warning System for Water Level Abrupt Change[R]. Chongqing:Chongqing Port and Shipping Administration and Chongqing Jiaotong University,2012.(in Chinese))
[8]张红苹.基于超声的船舶吨位检测技术[D].南京:河海大学,2006.(ZHANG Hong-ping.Technology of Testing Shipping Tonnage Using Ultrasonics[D].Nanjing: Hohai University,2006.(in Chinese))
[9]李 扬.基于超声波测距的船舶液位检测系统[D].重庆:重庆大学,2012.(LI Yang.Ship Level Detection System Based on Ultrasonic Ranging[D].Chongqing: Chongqing University,2012.(in Chinese))
[10]兰 羽.有温度补偿功能的超声波测距系统设计[J].电子测量技术,2013,36(2):85-87.(LAN Yu,Design of Ultrasonic Ranging System with the Function of TemperatureCompensation[J].ElectronicMeasurement Technology,2013,36(2):85-87.(in Chinese))
[11]韩云辉.万吨级舰船横倾补偿控制及虚拟仿真研究[D].哈尔滨:哈尔滨工程大学,2007.(HAN Yun-hui. Study on Compensation Control and Virtual Simulation of 10000 ton Ship Heeling[D].Harbin:Harbin Engineering University,2007.(in Chinese))
[12]杨庆勇.船舶自动应急抗沉减摇防倾覆装置[D].大连:大连海事大学,2000.(YANG Qing-yong.Automatic E-mergency Device for Ship Sink-resisting Roll-weakening Overturn-preventing[D].Dalian:Dalian Maritime University,2000.(in Chinese))
(编辑:陈绍选)
Developing of Portable Onboard Apparatus for Pre-alarming the Abrupt Change of Water Level
CAI Chuang,LIU Yuan-dong,XU Guang-xiang,LEI Peng-hua
(School of River and Ocean,Chongqing Jiaotong University,Chongqing 400074,China)
If water level changes abruptly in specific operating conditions such as power plant's black start,ships are prone to be capsized or stranded.In light of these conditions,a portable onboard apparatus for pre-alarming the abrupt change of water level is developed.The apparatus consists of temperature testing circuit,ultrasonic transmitting and receiving circuit,data display circuit and alarming circuit,with singlechip as the control core.Using this apparatus,three values such as the freeboard height,inclination of ships,and the water level change rate in the surrounding water area can be monitored instantaneously.When water level changes abruptly and one of the three values or all values exceed safety limit,the pre-alarming apparatus will automatically alarm and feedback the variations of these values to the crew in time,and alert the crew to adjust in order to ensure the safety of docked ships. Compared with traditional early warning system,it has many advantages such as low cost,small size,light weight, and easy installation.Finally,it can be applied to pre-alarming the abrupt change and safety monitoring of docked or navigational ships in the surrounding water area.
onboard;singlechip;ultrasonic sensor;water level;pre-alarming apparatus
TP274+.2;TP277
A
1001-5485(2015)11-0136-05
10.11988/ckyyb.20140395
2014-05-16;
2014-07-30
蔡 创(1968-),男,重庆市人,副研究员,从事小尺度船模及水工量测技术研究,(电话)13983819363(电子信箱)caichuang@sina. com。