NASA发布土卫六潜水机器人概念版
2015-01-03
军民两用技术与产品 2015年3期
NASA发布土卫六潜水机器人概念版
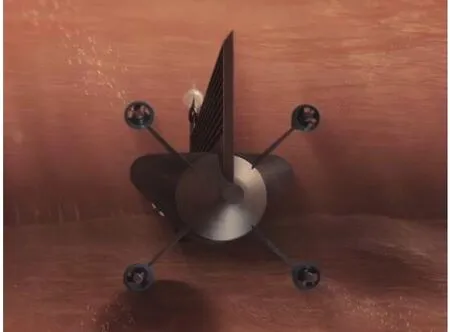
美国国家航空航天局(NASA)公布了1个用于探测土卫六液态甲烷/乙烷海洋的潜水机器人概念设计版本。该设计由NASA罗盘(compass)团队与来自应用研究实验室的研究人员共同开发。
据报道,该潜水机器人目前仍处于初级概念设计阶段,其外形与早期用于内战的潜艇相似,但在技术方面则充满了创新性。其最有可能的投放地点是面积39.89万平方千米、深160.02m的土卫六极海。为解决与该潜水机器人的通信问题,研究人员设想了1个系统,能够使该潜水机器人每隔16h上浮一次,然后再将信号传回地球,通常从信号发出到地球接收要耗费1.5h。作为海底探测器,其不能使用太阳能电池,将配备1个热辐射发动机用作该潜水机器人的推进器。由于极其寒冷,研究人员还将开发1个特殊的活塞驱动型系统,以防止镇流器冻结。
NASA希望该潜水机器人能够在2040年飞往土卫六;届时,1种带翼飞船将携带该潜水机器人抵达土卫六表面,然后下潜到极海里,释放出该潜水机器人,开启对极海下未知世界的探索。
(科 报)