重卡车车外盲区监测系统的方案设计与实现
2015-01-03黄娜李恩光
黄娜,李恩光
(陕西重型汽车有限公司,陕西 西安 710200)
重卡车车外盲区监测系统的方案设计与实现
黄娜,李恩光
(陕西重型汽车有限公司,陕西 西安 710200)
重卡车由于车身高、体积大、轴距长,在转弯、倒车时驾驶员视线会产生盲区,车外盲区监测系统有效消除了驾驶员的视觉盲区,特别是消除了右前侧、右后侧、后方等重点部位盲区,而且雷达探头可实现对接近车辆两侧危险区域内障碍物的自动报警,大大提供了重卡车的行车安全性。
车外盲区监测系统;显示屏;控制器;摄像头;雷达探头
CLC NO.: U463.9 Document Code: A Article ID: 1671-7988(2015)01-26-03
前言
交通运输过程中,重卡车由于车身高、体积大、轴距长,在转弯、倒车时驾驶员视线会产生盲区,经常发生骑车人或行人被卷入车底而造成伤亡的交通事故。为有效防止此类事故的发生,本文设计了车外盲区监测系统,能够实现对接近车辆两侧危险区域内的自动报警,同时在转弯、倒车时可通过车内视频观察侧面、后面的情况,消除了驾驶员视觉死区,保证了行车安全。
1、盲区监测系统组成
重卡车在行驶过程中,盲区主要集中在车辆右侧和后方,此两个区域成为主要监测区域。本系统应用了视频成像技术及雷达探测技术,可实现对监测区域的实时监测,并可对接近车辆的物体发出声音报警。盲区监测系统由显示屏、控制器、4路摄像头、2路雷达探头及若干连接电缆组成。
2、各组成部件的主要参数
2.1 显示屏
盲区监测系统应用了7寸TFT-LCD显示屏,如图1所示。
显示屏可分屏显示不同监测区域的影像画面,最多可四分屏,也可两分屏或全屏显示。显示屏自身配置了SPEAKER,且音量大小可调节,其主要技术参数如表1所示。
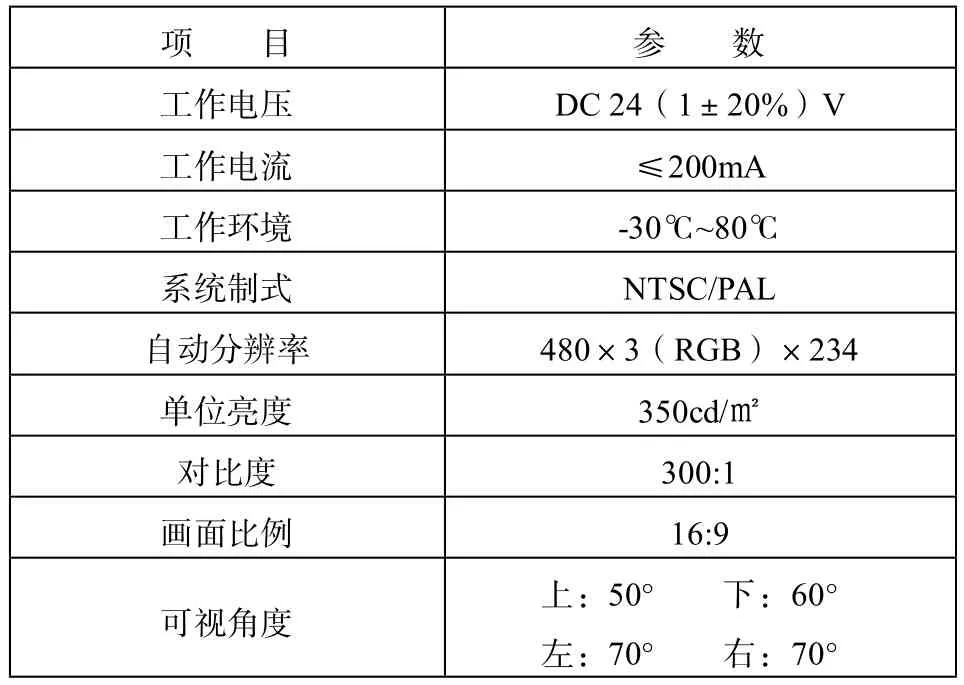
表1 显示屏的主要技术参数
2.2 控制器
控制器是盲区监测系统的核心部件,是各部件之间信息传输的枢纽,承担着音、视频信息处理的重要工作。控制器的主要技术参数如表2所示。

表2 控制器主要技术参数
2.3 摄像头
盲区监测系统应用了红外夜视摄像头,用以采集监测区域内的影像信息,由于安装在室外,因此具有较高的防护等级。摄像头可实现24小时全天候不间断工作,其主要技术参数如表3所示。
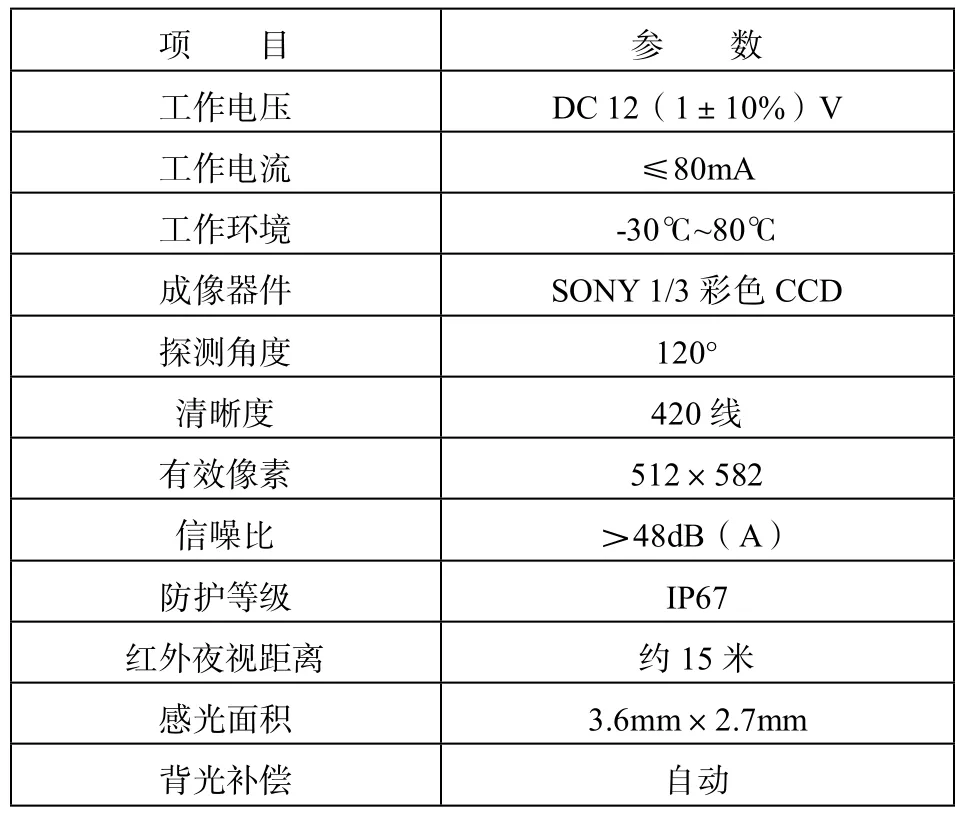
表3 摄像头主要技术参数
2.4 雷达探头
盲区监测系统应用了专为重卡车设计的雷达探头,具有较大的探测角度,可减少探头的应用数量,节省成本。雷达探头的主要技术参数如表4所示。
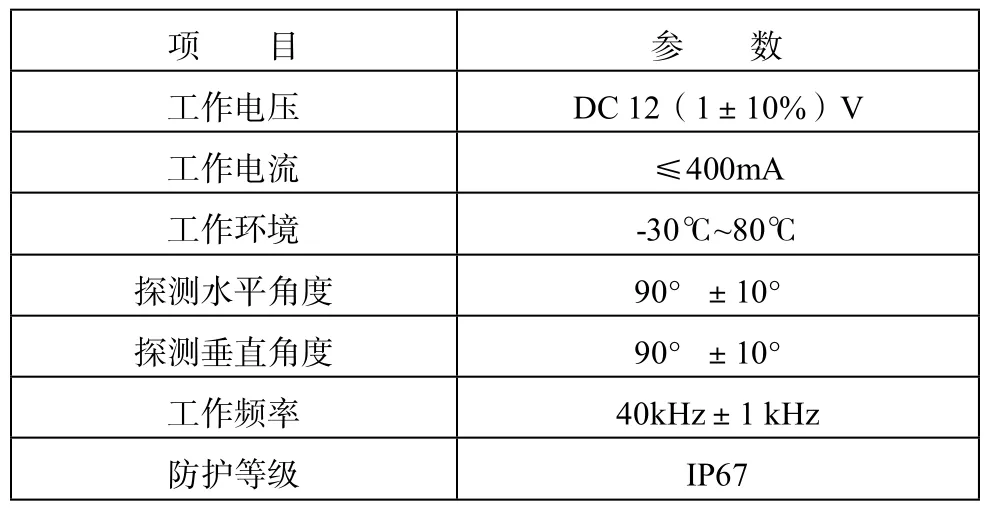
表4 雷达探头主要技术参数
2.5 连接电缆
盲区监测系统的连接电缆均为屏蔽电缆,可有效防止信号传输过程中被干扰。连接电缆与各部件对接的插接器均为航空接头,其防护等级可达到IP67,且具有较高的抗振性能,如图2所示。
3、盲区监测系统工作原理
3.1 系统工作原理框图
本系统专为重卡车型设计,适用于重卡车24V电源系统。在工作过程中,整车为控制器提供24V电源,控制器再将电源降压并分配给其他组成部件。控制器采集摄像头的影像信息、雷达探头的障碍物距离信息,处理之后结合从整车得到的控制信号(倒档、左转向、右转向信号),输出音、视频数据给显示屏进行显示。其原理框图如图3所示。
3.2 影像信息的工作逻辑
本系统4路摄像头分别布置于驾驶左侧1路、驾驶室右侧2路、车辆右尾灯处1路。
驾驶室左侧摄像头用于监测车辆左侧道路情况。
驾驶室右侧摄像头,一路装配于右后视镜附件,用于监测车辆右前方道路情况;另一路装配于驾驶室右后方,用于监测车辆右侧道路情况。
车辆右尾灯处摄像头用于监测车辆后方道路情况。
车辆行驶过程中,盲区监测系统可实时监测车辆周围的路况,将4路摄像头采集的影像信息全部显示在屏幕上,方便驾驶员观察,显示画面如图4(a)所示。
当驾驶员挂倒车档时,显示屏自动切换、并全屏显示后摄像头(即右尾灯处)的影像信息,如图4(b)所示。
当车辆右转弯时,显示屏自动切换、两分屏显示右侧摄像头(即车辆右前方、右后方)的影像信息,如图4(c)所示。
当车辆左转弯时,显示屏自动切换、全屏显示左侧摄像头(即车辆左方)的影像信息,如图4(d)所示。
3.3 雷达探头信息显示方式及报警逻辑
本系统所含2路雷达探头布置于车辆上车踏板处,左右各1路。雷达探头信息分别以向左、向右的箭头显示在LCD屏上,屏幕中间上方显示障碍物的距离,哪侧障碍物距离较近显示哪侧。如图4(c)所示。
雷达探头检测到障碍物距离其2m以内时,探头开始报警,屏幕上显示箭头及距离信息,显示颜色根据障碍物距离由远到近,显示为绿、黄、红三种颜色;当障碍物距离探头1.5m以内时,显示屏上SPEAKER报警开启,障碍物距离由远到近,报警声音也由缓变急。障碍物距离与报警方式对应关系如表5所示。

表5 障碍物距离与报警方式对应关系
4、结束语
本系统有效消除了驾驶员的视觉盲区,特别是消除了右前侧、右后侧、后方等重点部位盲区,用雷达探头实现对接近车辆两侧危险区域内的自动报警,同时伴以声音提示。 转弯时可通过车内视频观察车外情况,显示屏画面自动切换到相应摄像头的影像信息。 除此之外,还实现了倒车时显示屏画面的自动切换,使驾驶员方便快捷的观察到车辆后方情况。
本系统已成功应用于我公司新型环保渣土车上,大大提高了车辆的行驶安全性。
[1] 吴琼,封维忠,马文杰. 汽车倒车雷达系统的设计与实现[J]. 现代电子技术,2009(09):191-194.
[2] 王斌,刘昭度,何玮,等. 车用测距雷达研究进展[J].传感器与微系统,2006,25(06):7-9.
The Design and Implementation of Blind Spot Monitoring System for Heavy Truck Outside
Huang Na, Li Enguang
(Shaanxi Heavy-Duty Automobile Co., Ltd., Shaanxi Xi'an 710200)
Due to heavy truck vehicle height, bulky and long wheelbase, the sight of the driver will have a blind spot when reversing and in turn, vehicle blind spot monitoring system can effectively eliminate the driver's vision blind spot, particularly the elimination of the right front side, rear right, and other key parts of the rear blind, Radar probe to realize automatic alarm on both sides close to the danger zone within the vehicle, provide traffic safety considerably heavy trucks.
The Vehicle Blind Spot Monitoring System;Display Screen;Controller;Webcam;Radar Probe
U463.9
A
1671-7988(2015)01-26-03
黄娜,就职于陕西重型汽车有限公司。
