基于ARM的煤矿井下供水智能控制系统
2015-01-02张雅洁张自强
张雅洁 张自强
(安徽水利水电职业技术学院,安徽 合肥231603)
0 引言
针对淮沪煤电丁集矿井下供水的特殊情况,为了更好地保证井下供水安全,降低井下阀门和管道的损耗,防止管道在水压过大时,发生爆管的事情。根据井下供水的要求,必须保证井下管道的压力在2~3MPa之间,而由于供水又是采用自流水的形式,流量不确定,井口到井下的距离有800多米,水从井口到井下都需要一定的时间,且会有冲击效应,这些都会对控制阀门的开度产生一定的影响,且井下压力的显示也滞后于执行机构,因此,该系统很难建立精确的数学模型,另外以往的井下供水系统对于检测量又比较单一,建成的都是单输入的控制系统,控制效果不佳,因此本人设计了基于ARM的煤矿井下供水多输入模糊控制系统。
1 系统组成及其功能特点
1.1 系统的组成
该系统主要部件及组成主要有:水压压力传感器、ARM智能控制器、电动球阀、流量传感器。系统结构框图和自动供水流程图分别如图1、图2所示。

图1 系统结构框图
1.2 系统的功能特点
(1)该系统能够根据井下压力的要求及时自动调节电动阀门,确保井下水压在设定范围内,并能够根据要求随时更改设定压力值;
(2)该系统利用井下压力传感器和井上流量传感器传来的数据作为控制器的输入,具有提前预测的能力,极大地提高了控制系统的可靠性和精度;
(3)该系统具有实时显示井下水压的能力;
(4)该系统还根据实际情况安装了排气阀和安全阀,同时解决了管道中有水汽和控制器失效时压力过大的问题;
(5)本系统采用光纤传输;
(6)本系统在硬件上采用了先进的ARM920T作为嵌入式控制器,控制策略采用多输入模糊控制;
(7)本系统可以实现对主井和副井同时控制。
2 系统的工作原理
根据淮沪煤电丁集矿井下供水的实际情况,本系统采用一个压力传感器和一个流量传感器分别来测量井下供水压力p和井上水流速度v;将p和v作为系统的输入量来控制井上阀门的开度。其中压力传感器将测得的值先传给KZC127矿用隔爆兼本安型信号转换器,然后KZC127再通过光纤将值传给KJJ121型矿用隔爆型网路控制器,最后KJJ121通过工业以太网将值传给井上的控制器。
系统中电动球阀F1是执行机构,通过调整它的开度可以控制井下管道内的水压,保证其在安全范围内;安全阀是在控制器或执行机构出现故障时,及时排出管道内多余的水,降低管道内的水压,降低由于水压过高对管壁和阀门的损耗;排气阀的作用是排出水流带入管道内的气体,解决由于气体压缩造成压力传感器误判的问题。
3 智能控制器的设计
由于在整个供水过程中,系统具有很大的不确定性、高度的非线性,要建立一个线性系统是不可能的,因此在综合考虑现场各种环境的情况下,本系统选用多输入模糊控制的控制策略。
3.1 多输入模糊控制器的结构
本系统的控制策略的控制器结构如图3所示。

图2 自动供水流程图
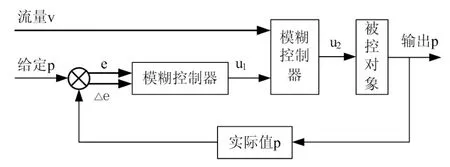
图3 井下供水多输入模糊控制器结构
3.2 多输入模糊算法
1)输入输出变量尺度变换及模糊化处理
v流量:v=[20,166],离散论域定为:V={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
p的误差变化范围:e=[-0.5,0.5],论域定为:E={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
p的误差改变量的变化范围:Δe=[-1,1],论域定为:EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
控制量u1和u2输出范围:u1=u2=[4mA,20mA],论域定为:

令V、E、EC、U1和U2的模糊分割后的集合为:{NB,NM,NS,ZE,PS,PM,PB},且隶属函数采用最常用的三角函数来描述,则煤矿井上管道内水的流量V、煤矿井下管道内水压P误差E、误差改变量EC、控制量U1和U2的隶属度赋值表如表1所示。

表1 V、E、EC、U1和U2的隶属度赋值表
2)模糊控制规则表和模糊控制总表的设计
通过现场调查和现场专家及技术人员的经验,制定了输出U1和输出U2模糊控制规则表。
根据Mamdani模型的模糊推理的并行法可知:各模糊规则的模糊蕴含关系分别是R1,R2,…,Rj,且Ri=Ai1×Ai2×…×Aij×Bi,如果系统的当前状态为:A’1,A’2,…,A’j,则所有模糊规则的输出为:

由此可得该控制器的最终输出为:B’=B’1∪B’2∪…∪B’j
再根据面积中心法进行解模糊运算,从而得到该控制器的模糊控制总表,如表2所示。

表2 模糊控制总表
将以上算法用C语言进行编程,并将其移植到ARM中去,从而增强了控制的快速性,大大提高了控制器的控制精度,防止了由于计算而造成的延迟,消除了以往用PLC来控制要通过上位机来计算而造成的时间延迟。
4 系统仿真
本系统模拟淮沪煤电丁集矿自动供水的实际情况用MATLAB进行系统仿真,煤矿井下水压可以快速地控制在安全范围内,同时也保证了井下供水的要求,达到了预期设想的控制效果。
5 结语
本系统综合采用了多输入模糊控制、ARM、光纤传输、工业以太网等技术,实现了井下供水无人看守的自动控制,解决了深井井下供水存在的问题,同时也大大降低了生产成本,此系统具有很强的抗干扰性能、结构简单、调试方便、鲁棒性好等特点。
[1]许力.智能控制与智能系统[M].北京:机械工业出版社,2006,12.
[2]张曾科,编.模糊数学在自动化技术中的应用.北京:清华大学出版社,1999.
[3]刘金琨.先进PID控制及其MATLAB仿真.电子工业出版社,2003.