基于既有线固定闭塞信号系统升级的方案研究
2015-01-01罗勋
罗 勋
北京地铁13号线是北京第一条全地面轨道的城市轨道线路,全长40.5km。由于当时13号线是按照郊区联络线规划建设,设计运行间隔大,信号系统配置技术等级低,早已不能满足客流不断增长的运营要求。且原信号系统采用英国西屋公司的设备及技术,存在设备老化问题突出,维修困难等问题。为此,北京地铁联合大成通号公司进行国产化目标-距离模式信号系统研发及应用试验,目的是采用国产化产品,对未完全到使用寿命的既有系统进行局部改造、替代,延长系统使用寿命,提升信号系统运行间隔能力,提升设备稳定性。
1 概念解析
1.1 增量更新
增量更新是在计算机应用中的一种更新模式,特指在更新操作时,只更新局部。将增量更新的概念引入到城市轨道交通信号系统工程中,则特指充分利用既有基础信号设备,仅局部改造处于性能瓶颈,或者影响系统提升能力的子系统,对其他设备仅做必要的软件升级或调整,以达到提升信号系统运营间隔能力,提高系统设备服务水平的目的。
1.2 固定闭塞模式列车自动防护系统
基于轨道电路的固定闭塞模式列车自动防护系统,广泛运用于北京、上海、天津等地多条城市轨道交通线路。它是利用音频轨道电路,来实现列车定位、速度码的传输,采用阶梯式速度曲线 (FBSS)控制列车。这种列车控制系统的控制精度不高,舒适度较差。此外,由于闭塞分区长度的划定是按照最长列车、满载、最高允许速度、最不利制动率及最小列车运行闻隔时间等最严格条件设计,影响了行车效率。
1.3 目标-距离模式列车自动防护系统
基于轨道电路的准移动闭塞模式列车自动控制系统,在铁路及部分城市轨道交通线路也得到了应用,如北京地铁5号线。该系统采用目标-距离模式 (DTG)防护曲线,列车根据轨道传来的编码信息和APR信息,以及地理数据,计算出列车不得逾越的最大安全距离,并实时计算出列车的防护速度曲线。列车实际速度一旦超出的防护速度曲线,则实施紧急制动。同时,列车也不能越过计算出的最大安全距离,否则实施紧急制动。
准移动闭塞的地面设备 (轨道电路加信标)应向车载设备提供所需信息,实现列车运行的连续式速度和可行车距离控制。准移动闭塞的列车安全间隔,是以所在闭塞分区入口端为目标地点 (危险点),由后续列车以当前速度制动停车所需走行距离加安全保护距离确定。目标-距离模式中,每列车都会产生可以安全运行的 “运行权限”(LMA),并生成防护速度曲线。
为了使列车能够在DTG模式下工作,需沿轨道放置APR (绝对位置信标),以实现列车的精确定位。在目标-距离模式中,当发生某些故障时,仍能使列车从DTG模式降级为FBSS模式,保证不中断运营,而且还能保证与原固定闭塞系统相同的效率。
图1为目标-距离模式示意图,列车实际运行速度与计算的防护速度连续进行比较,超过防护速度则实施紧急制动。列车超过 “运行权限”(LMA),则实施紧急制动。目标-距离模式和固定闭塞速度信号模式 (FBSS)相兼容。
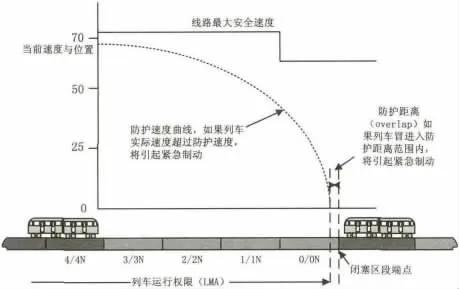
图1 目标-距离模式
2 目标-距离模式ATP系统工作原理
2.1 速度和距离测量
在目标-距离模式中,列车位置是安全关键因素。如果在线路中,列车没有一个精确的位置表示,就不能保证在某个闭塞区段或限制区段之前停车或减速。
测速电机负责给车载ATP设备提供速度信息。但由于测速电机不能精确地补偿车轮空转和打滑,还需要配置多普勒雷达,由多普勒雷达所测的速度与测速电机给出的输入速度进行比较,可对速度测量系统做进一步的可靠性校验。
通过安装在列车上的阅读器读入沿轨道按固定间距安装APR的数据。每个APR具有一个惟一标识,该标识存储在车载ATP地理数据中。列车根据速度信息,计算出列车行驶距离,并根据APR信息确定列车当前位置。
2.2 运行权限
一般而言,ATP车载设备接收轨道传来的编码信息,经过译码后,即可知道列车前方还有几个未被占用的轨道电路。
列车根据收到的编码信息,结合车载ATP设备中存储的地理数据,就可以计算出列车不得逾越的最大安全距离。运行权限示意图如图2所示,其中编码可以翻译如下。
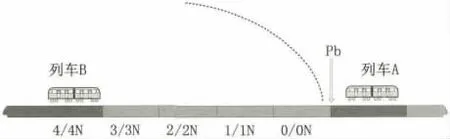
图2 运行权限示意图
0/0N:最大安全距离为列车当前位置到本轨道电路尽头的距离。
1/1N:最大安全距离为前一闭塞分区的长度,与列车占用位置到占用本轨道电路尽头的距离之和。
2/2N:最大安全距离为前2个闭塞分区的长度,与列车占用位置到占用本轨道电路尽头的距离之和。
3/3N:最大安全距离为前3个闭塞分区的长度,与列车占用位置到占用本轨道电路尽头的距离之和。
4/4N:最大安全距离为前4个闭塞分区的长度,与列车占用位置到占用本轨道电路尽头的距离之和。
如图2所示,假设列车A静止,列车B正从后面向列车A靠近。列车B收到的编码是4/4N,所以前方有4段轨道电路空闲。Pb点是列车A占用的轨道电路的起点,无论如何列车B都不得逾越该点。列车B继续前进,进入了下一段轨道电路,它开始接收3/3N编码,表明前方有3段轨道电路空闲。
实际上,列车不会正好停在轨道电路的终点,而是在轨道电路终点之前,会留出一定的安全距离(该安全距离可以在工程设计时,由软件配置)。
2.3 防护速度曲线
列车根据轨道传来的编码信息和APR信息以及地理数据,计算出列车不得逾越的最大安全距离,并实时计算列车的防护速度曲线。列车必须在此曲线下运行。
除了上述条件外,在线路的某些区域,由于某种特殊情况或临时性原因,如轨道临时作业等,还有一些永久或临时性速度限制要求。ATP将充分考虑到限制条件,选择最严格的条件来执行,以便对列车实施保护。
3 “目标-距离”与 “固定闭塞”的区别
1.运行权限生成方式不同。固定闭塞模式没有运行权限,也就是说没有目标-距离,只有最大安全速度及目标速度;而 “目标-距离”模式有允许列车行驶最大距离限制,如果超出这个距离,列车实施紧急制动。
2.防护速度定义不同。如图3所示,固定闭塞模式在每个区段内有一个来自地面的固定最大安全速度;“目标-距离”模式的最大安全速度是车载设备根据运行权限连续计算的。
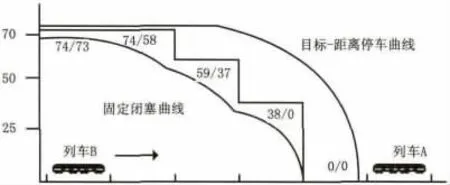
图3 停车曲线图
3.防护方式不同。速度码模式只有速度防护,“目标-距离”模式不仅有速度防护,还有距离防护。
4.追踪间隔不同。从图3中停车曲线的停车点可以看出,固定闭塞的追踪间隔比目标-距离的追踪间隔多一个闭塞区段,称为防护区段。显然,目标-距离比固定闭塞的效率高。同样道理,折返效率也会提高。
4 “固定闭塞”模式升级 “目标-距离”的增量更新方案
在对北京地铁13号线固定闭塞模式信号系统进行增量更新时,在硬件方面,需进行车载ATP子系统及外围设备更新,地面新增APR信标设备,原有的地面设备均可以保留;软件方面,联锁及CTC设备需进行软件升级;在轨道码定义方面,也需对原有速度台阶轨道码进行重新释义,以实现目标-距离模式运行。
车载ATP子系统及外围设备更新内容:①改造既有速度台阶模式车载ATP控制单元,升级基于轨道电路传输的目标-距离模式ATP控制单元;②改造司机显示单元,加入目标-距离模式信息显示,及进入目标-距离模式操作按钮;③增加车载APR阅读器,用于读取地面无源信标、有源信标的信息;④增加多普勒雷达,用于列车打滑、空转补偿。
地面新增APR信标设备包含:①无源信标,安装在区间轨旁,用于列车读取以确定绝对位置;②有源信标,安装在区间轨旁,用于向列车发送临时限速,站台封闭等特定可变信息。保留既有ATS系统、联锁系统、地面ATP系统 (轨道电路发码设备、编码电路、室外调谐单元),以及既有车载外围设备,包括测速电机、ATP天线、速度表及ATP模式开关等。
车载ATP对轨道码译码重新进行定义。因定义完全不同于速度台阶的MSS/TS(最大安全速度/目标速度),故需人工将全线速度台阶模式编码(简称FBSS编码)翻译成前方空闲区段数的编码,即DTG信号模式编码 (简称DTG编码),并存储在地理数据中。ATP控制单元根据列车位置信息和FBSS编码,去地理数据中读取对应的DTG编码,如果能够读取对应的DTG编码,则认为DTG编码有效。
5 增量更新方案的优势和意义
经测算,如采用全面改造更新为CBTC信号系统的方案,13号线改造工程需投资约15.5亿元,工期4-5年。而选择增量更新方案,可实现2min最小运行间隔 (原系统设计间隔3min),只需投资5.7亿元,工期2年。
增量更新的方案充分利用既有的地面联锁、轨道电路、ATS等设备,在局部进行软件升级,必需的硬件增容,通过替换车载信号设备,新增地面APR信标,即可实现固定闭塞信号系统升级至准移动闭塞模式.在升级过程中,无需配置新旧2套设备和设计安装倒切装置,新设备可兼容原有的固定闭塞模式地面设备,实现改造与运营互不影响,减少运营影响、平滑过渡的目的。
目前,北京地铁13号线已经使用此更新方法进行了应用试验和试验段调试,相信可进一步推广应用。
[1] 林瑜筠.城市轨道交通信号[M].北京:中国铁道出版社,2010.
[2] 刘剑.城市轨道交通移动闭塞系统后备模式的研究[D].北京:中国铁道科学研究院,2005.
[3] 陈永生,徐金祥.上海轨道交通信号制式的多样性及其对策[J].城市轨道交通研究,2002(4).
[4] 北京市地铁运营有限公司,北京全路通信信号研究设计院有限公司.北京地铁13号线信号系统扩能改造方案[S].2014.
