新型电子摆在捣固车上的应用
2014-12-31刘中田
刘中田
(昆明中铁大型养路机械集团有限公司 研究院,云南 昆明 650215)
0 引言
铁道线路水平的检测是捣固车起道作业的前提条件,只有对既有线路的水平进行正确的定量检测,才能完成良好质量的捣固作业。而目前完成上述检测功能的传感器采用横向水平电子摆EL-T2036,在DC-32捣固车、DCL-32连续式捣固车、CDC-16道岔捣固车和WD-320稳定车中,此类型电子摆得到了广泛的应用。起道作业完成后线路达到±2mm以内的横平作业精度,电子摆起到了关键的作用。
1 电子摆EL-T2036
捣固车系列横向水平检测装置通常由3个电子摆组成,分别安装在B,C,D点的三个测量小车架的中央,如图1所示。安装在D点前张紧车上的前电子摆Pf是用来检测起道前线路的实际横向水平值,与其他途径输入的起道量进行比较,控制起道装置的动作;安装在C点拨道小车上的中电子摆Pm用来检测起道作业过程中轨道水平变化,若起道表显示有水平不良时,作业人员可随时进行调整,以保证起道作业质量;安装在B点小车的后电子摆Pr用来检测作业后的线路横向水平,向记录仪提供信号,是记录专用电子摆。
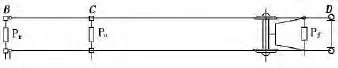
图1 电子摆安装示意图
1.1 电子摆工作原理
电子摆是一种检测物体水平状态的机械电子传感器,其结构简图如图2所示。当底座处于水平位置时,摆锤保持垂直状态,此时电位计上的可动触点处于中立位置,电路平衡,无电信号输出。当测量小车左右倾斜时,摆锤将向一侧摆动,经机械传动系统使电位计转动,并输出相应的电信号,该电信号的大小实际上就是与底座相连的测量小车的倾斜度,即线路两股钢轨的横向水平差值。
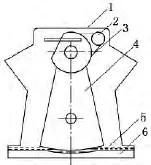
图2 电子摆结构示意图
1.2 电子摆性能参数
电子摆性能参数如下:
全量程(mm): 360;
有效量程(mm): ±180;
信号比例(mV/mm):25;
线性度(%): ±0.3;
工作电源: ±15VDC;
响应时间(s):0.9~1.2;
外形尺寸(mm):350×196×394;
安装孔:4-Φ12,中心距320×100;
质量(kg):27.3。
该电子摆量程范围宽、线性度好、精度高,但其质量大、拆装不方便、价格贵。其电信号为模拟量,调试校正步骤多,需要调整机械水平零点、电气零点、左右对应值等。
2 新型电子摆——高精度电压型单轴倾角传感器
新型电子摆是一款高精度模拟电压或数字量输出的单轴倾角传感器,其最高精度可达到0.001°,是国内为数不多的高精度倾角仪,主要用来测量物体与水平面的倾斜,其外观图如3所示。内部采用高分辨率差分数模转换器,通过自动补偿方法,减小了环境变化引起的误差。微型固体摆锤通过测量静态重力场变化,转换成倾角变化,其变化通过电压(0V~5V)方式输出。在安装调试过程中,无机械水泡调整步骤,因此节约了调试时间,具体的精度校准可以在软件中进行相应的处理。

图3 单轴倾角传感器外观图
2.1 工作原理
新型电子摆采用倾角单元,电容微型摆锤原理。利用地球重力原理,当倾角单元倾斜时,地球重力在相应的摆锤上会产生重力的分量,相应的电容量会发生变化,通过对电容量进行放大、滤波、转换处理之后得出倾角。
2.2 主要特性参数
高精度电压型单轴倾角传感器主要特性参数如下:
量程(mm): ±180;
长期稳定性(°): <0.002;
宽电压输入(V):9~36;
输出电压(V):0~5;
工作温度(℃): -40~+100;
防护等级:IP67;
高抗振性能(g): >20 000;
高分辩率(°):0.000 8;
体积(mm):90×45×29。
倾角传感器采用非接触式测量原理,能实时输出当前的姿态倾角,其使用简单,无需找回相对变化的两个面安装,安装方便;精度高、体积小、价格便宜、对外界电磁抗干扰能力强、承受冲击振动能力强。
3 新型倾角传感器实验测试和数据处理
为测试新型倾角传感器在捣固车上检测和记录横平作业的可用性,做如下电子摆的测试实验。电子摆实验测试示意图如图4所示。首先将倾角传感器(包括模拟和数字型)安装在DCL-32连续式捣固车的前张紧小车上,保证倾角传感器和原电子摆EL-T2036在同一测量点。按图4测试原理,采集原电子摆和倾角传感器的模拟和数字信号到计算机系统。其中,模拟型倾角传感器和原电子摆通过PCLD-8710和PCL-7410数据卡采集信号,数字型倾角传感器通过485/232转换器、232通讯接口采集信号。再使用Analyze专业工具软件记录各传感器的测量数据图形。
3.1 实验数据和分析
图5为3种传感器测量数据。曲线①为数字型倾角传感器记录的数据;曲线②为模拟型倾角传感器记录的数据;曲线③为原电子摆EL-T2036测量的数据。横坐标为采样时间(s),纵坐标为横平超高幅度。

图4 电子摆实验测试示意图
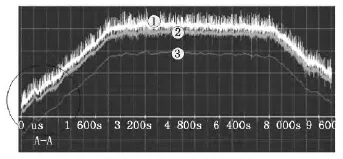
图5 3种传感器测量数据
从图5可以看出:3种传感器的波形基本相同,原电子摆的波形曲线连续平滑,波动量小;模拟倾角传感器波形与原电子摆波形几乎相同,但波动量比原电子摆稍大些;数字倾角传感器波形与原电子摆也几乎相同,但曲线波动量较大。产生上述结果的原因是:原电子摆中的硅油产生一定的阻尼,滤去了捣固车振动的影响,相当于机械式的滤波器,因此测量的曲线连续平滑、波动量小;而倾角传感器采用电容微型摆锤,没有硅油等产生的阻尼,所以产生曲线的波动量较大。
为更准确地记录和测量铁路线路的数据,减少捣固车振动对记录数据的影响,必须对模拟和数字型倾角传感器的记录数据进行软件上的优化处理。
3.2 数据处理和优化
原电子摆记录的曲线平滑、波动量小,能够准确地测量和记录作业线路的前后超高情况。为了使倾角传感器同时能达到原电子摆的记录效果,减少捣固车振动的影响,现采用滑动平均滤波法对数据信号进行相应的滤波处理。该滤波法可以抑制和消除曲线上的毛刺干扰,能较好地滤除捣固车高频振动的干扰信号。其滑动平均滤波法的计算公式为:

其中:X为显示值;X1为上一次的显示值;Ap-1为堆栈累加值,p为地址指针;C为本次采样值;n为采样次数。
滑动平均滤波法的具体实现可在PLC中进行,可以减轻设计和计算滑动平均滤波法的工作量。因此首先创建一个数据堆栈,长度取决于最大采样次数,堆栈越长,用于求平均的数据越多,平均后的数据曲线越平滑(即滤波效果越好)。图5中A-A区域滤波后的数据图形如图6所示。

图6 图5中A-A区域滤波后的数据图形
从图6可以看出:经滤波后模拟型倾角传感器的数据和原电子摆曲线拟合程度高,并减少了曲线的毛剌干扰;而数字型倾角传感器也减少了信号干扰成分、曲线趋于平滑,在此区域内数据都偏离原电子摆上方,但差值在0.4mm以内;对于数字型倾角传感器可以增加采样次数,其优化结果会变得更好。总之,两种倾角传感器所测试的实验数据经滤波处理后,均可以满足捣固车的作业使用要求。
4 结束语
目前,稳定车和捣固车系列普遍采用2~4个电子摆对线路进行测量和记录作业的数据。通过以上实验分析和探讨,模拟和数字型倾角传感器可基本替换原电子摆(EL-T2036)的测量和记录功能。对于捣固车系列的模拟系统改造和升级,可用模拟倾角传感器替代原电子摆,且改造方便、无需信号的转换;对于新型数字网络捣固和稳定车型可采用数字倾角传感器替代原电子摆,且集成性好,信号处理方便。新型电子摆如果能在捣固车和稳定车上普遍应用,则会在很大程度上降低生产成本。
[1]韩志青,唐定全.抄平起拨道捣固车[M].北京:中国铁道出版社,2001.
[2]杨新军,张文东,胡跃进,等.大型养路机械检修技术基础[M].成都:西南交通大学出版社,2005.
[3]王化祥,张淑英.传感器原理及应用[M].天津:天津大学出版社,1998.
