足式教学机器人的模块化设计
2014-12-31陈鸣晖
陈鸣晖,钱 桦,吴 健
(北京林业大学,北京 100083)
0 引言
近年来,教学机器人得到了越来越多的关注,越来越多的公司和研究者开始探索和研究教学机器人的开发。而现有的教学机器人价格昂贵、模块化程度低、维修困难。因此,需要结合现有教学机器人的特点,对其进行模块化设计,为机器人实验室提供一套适合教学和开展竞赛活动的机器人平台,以供教学和有兴趣的同学使用[1-3]。
教学机器人一般有轮(履)式、足式等基本结构。轮(履)式结构主要有移动式底盘,能完成循线、避障等功能,可用于机器人竞赛类项目。足式机器人主要进行行走、爬行和舞蹈表演等项目,可用于机器人兴趣性教学。本文根据模块化设计的原则对足式教学机器人进行了模块划分和模块化设计,组合构成了单足、双足及多足的足式机器人,使之能适应不同的教学环境,完成多变的动作任务。
1 模块化设计的基本方法及设计原则
1.1 模块化设计的基本方法
模块化设计包括划分模块和模块组合。模块化机器人的基本单元就是模块,因此模块化设计的前提与基础就是应合理的划分模块。模块划分的基本思路为:遵循模块划分的原则,按照不同的类型将机器人划分为几个部分,并进行相关计算,类聚成模块。模块化设计流程如图1所示[4]。

图1 模块化设计流程图
1.2 教学机器人模块设计原则
由于教学机器人的主要功能是教学和竞赛,需要面对不同的用户群,因此对教学机器人模块的设计因遵循以下原则[5]:①为简化教学机器人系统的复杂程度,应尽量减少模块数量;②力求以最少的模块获得最多的机器人结构,满足教学需求;③不同模块之间的连接简单、方便、可靠;④各模块所具备的功能有各自的特点,用户可以较方便地进行选择。
2 机器人结构参数的确定
在模块化系统中,各模块须有标准接口,能通过多种方式自由组合构成产品。因此需要统一足式教学机器人结构件中的板厚,以及连接处的孔间距和孔径,构成模块的标准接口。
2.1 本体材料选择及板厚的确定
根据教学机器人大小尺寸的限定,该机器人应轻便易携,为使零件具有较好的强度和刚度,金属零件材料选用6061硬质铝合金。根据6061板材规格,在满足强度要求的基础上应尽可能地减少零件质量,故该机器人所有零件的板厚确定为2mm。
2.2 孔间距和孔径
该教学机器人金属零件上分布有多个Φ3的螺孔,用于安装采购来的传感器;还有几个Φ8的孔,用于安装轴承。板上的孔间距均为14mm,统一的孔间距方便各模块之间的连接。
3 足式教学机器人模块化设计
教学机器人以双足和多足机器人的结构为主进行设计,能满足一般的教学需要,如进行舞蹈、行走、爬行等表演或竞赛。
3.1 模块划分
双足和多足机器人均由各关节之间的协调运动来驱动机器人,因此足式机器人可划分为功能模块和辅助模块。通过功能模块之间的配合构成各种关节,由辅助模块将各关节连接成一个整体。
3.1.1 功能模块
功能模块是在多功能支架上安装一个舵机,再搭配一个U型架,每个功能模块都有一个自由度。功能模块的作用就是提供一个旋转自由度,用功能模块可以满足各种关节机器人对自由度的需求。各功能模块通过多功能支架上的孔将两个功能模块连接在一起,形成一个具有两自由度的模块,如图2所示。通过功能模块和其他模块的配合,完成自由度的累积,搭建一个多自由度的步行机器人。
3.1.2 辅助模块
辅助模块的作用是连接功能模块构成的各关节。该模块由一字型支架连接两个U型梁组成,它可以将累积起来的相互独立的各功能模块连接在一起,如图3所示。使用者可以根据自己的需求搭建不同的辅助模块。

图2 功能模块连接示意图
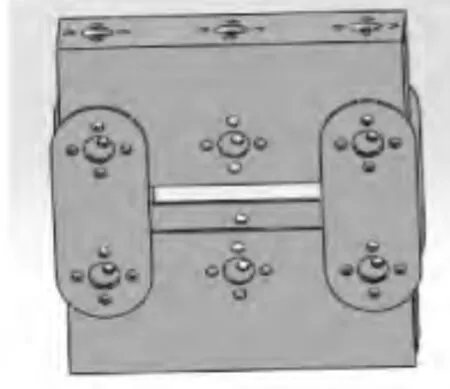
图3 辅助模块的类型
3.2 双足机器人构型与方案确定
双足机器人设计的目的是应具有步行、舞蹈等功能。机器人每条腿上都设置有踝、膝、髋3个关节,此3个关节对稳定步态的实现是必要的。在双足机器人的行走过程中,由髋关节驱动腿部摆动,实现迈步使机器人前倾或后仰,起辅助平衡的作用。踝关节则与髋关节配合完成机器人的移动过程,并调节地面与机器人脚底板的接触状态。膝关节用于调节机器人的重心,并根据地形改变其落地高度,使得机器人脚底板与地形适应。双足机器人设计要求见表1。
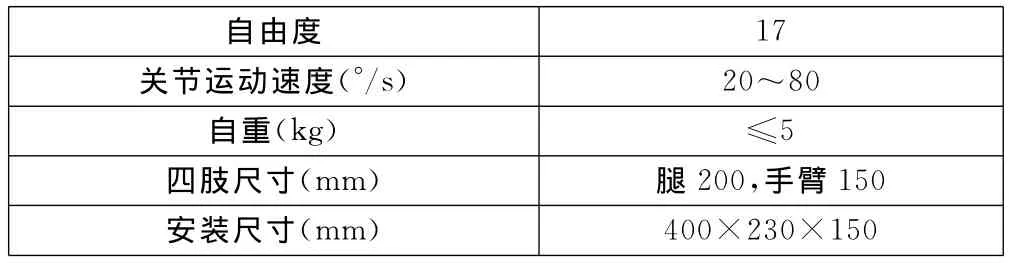
表1 双足机器人设计要求
为了使双足机器人能完成各种演示动作,要求双足机器人应具有一定数量的自由度。双足机器人的自由度是设计的关键参数,其数目应与目标任务相匹配。从仿生学的角度看,在踝部和髋部各设2个自由度,机器人可以在平整的地面上站立,如果在髋部增加1个竖直方向的扭转自由度,则能使机器人具备改变行走方向的能力;此外,在踝关节处增加1个自由度可使机器人在不平整的表面上落地;另外膝关节还有1个自由度,则共需要有7×2个自由度。但本文涉及的双足机器人的行走环境较为良好,路面平整,因此腿部采用5×2个自由度。其中,髋部4个自由度,膝关节2个自由度,踝部4个自由度。此外,头部1个自由度,手臂4个自由度,肩部2个自由度,总共17个自由度。本文双足机器人采用多关节型结构,能实现平地前后行走、舞蹈等演示功能。双足机器人模块化构型如图4所示。
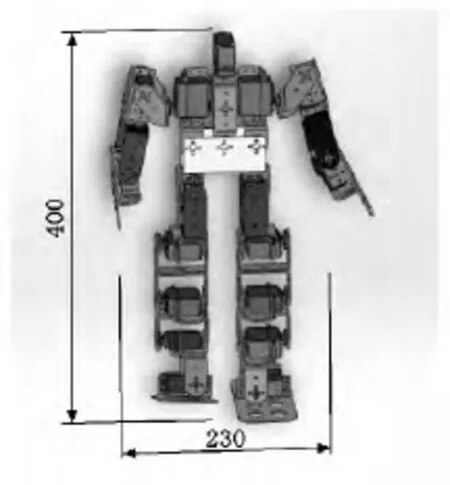
图4 双足机器人模块化构型
3.3 多足机器人构型与方案确定
以四足机器人为例设计多足机器人,可完成爬行、越障等功能。四足机器人采用3个转动关节的RRR机构,分为大腿(b杆)、小腿(c杆)与髋关节(a杆)三部分。大腿和小腿在同一个平面内运动,小腿可绕B点旋转,大腿绕A点旋转,控制整条腿的抬落运动;再由髋关节绕O点旋转带动大腿和小腿一起做空间运动,如图5所示。通过四足之间的协调运动,使机器人完成行走步态。

图5 四足机器人腿部结构简图
表2为四足机器人设计要求。四足机器人由躯体和4条腿构成,每条腿都有3个自由度。其4条腿对称分布在躯体两侧,重心与其几何中心重合。四足机器人移动时,一般可以有2条或3条腿着地,支撑面较大,基本可以完成静态步行,即在移动时机器人的重心始终落在支撑面内。四足机器人构型如图6所示。
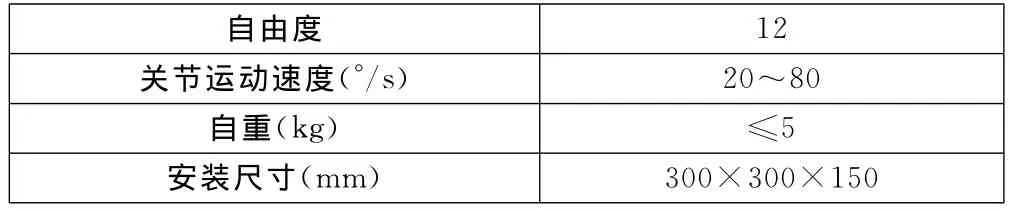
表2 四足机器人设计要求

图6 四足机器人构型
4 结论
本文提出了足式教学机器人的模块化设计方法,包括零件设计、材料选取及可重构实现。依据本套模块化设计的组件,可以完成单足、双足及多足的多款足类机器人的搭建,使之能适应不同的教学环境,完成多变的动作任务,从而激发学生的创造力以及对机器人知识的浓厚兴趣和热情。该模块化设计易于学生搭建、功能强大、通用性强、制造简单、成本低廉、便于拆卸,有利于学生对基本的机构原理的理解,为学生提供了具有开放式特征的实训实验平台。
[1]Gao Haitao,Zhang Zhisheng.General dynamic model for educational assembling type robot and its fast simulation algorithm[J].Journal of Southeast University(English Edition),2009,25(s3):340-345.
[2]张艳丽,郭建烨.可重构模块化机器人的构形设计[J].沈阳航空工业学院学报,2002(19):42-44.
[3]王鹏飞,秦小云.可重构模块化机器人的研究[J].中国水运,2007(7):164-165.
[4]白鹏.可重构模块化机器人构形综合与寻优[D].沈阳:东北大学,2009:11-12.
[5]王日君,张进生,葛培琪,等.模块化设计中模块划分方法的研究[J].组合机床与自动化加工技术,2008(7):17-21.
