移动教学机器人设计
2014-12-31陈震宇
陈震宇,钱 桦
(北京林业大学 工学院,北京 100035)
0 引言
当前国内用于教学的机器人普遍为轮式机器人,其有着结构简单、控制方便等特点,易于初学者接触学习,多用于巡线避障等实验。但是,由于其功能比较单一,在竞赛方面,轮式移动机器人的适用范围比较狭窄,除了在早期的比赛中有所展示之外,渐渐地退出了竞赛范围。多自由度的机械臂也普遍被应用在机器人教学项目里,被用来演示一定空间范围内物体的抓取,用以运动学分析的教学。这种机械臂的优点在于由一台专门的上位机控制,可通过相应的软件直接进行机械臂空间位置的调整。但是,其缺点也很明显,一般都是位置固定的,而且普遍为封闭的,不用于拆卸。
本文针对开放式教学的特点,结合教学实际,设计了一套基于本科教学实验用的轮臂式教学机器人,搭建了具有较高的开放性、通用性和关节型结构的微型机器人的教学平台。
1 机器人整体设计方案
图1为机器人系统总设计框图。本教学用机器人的系统总体设计以控制系统模块化为主,采用嵌入式系统为主要控制技术。控制系统主要由AVR核心模块、驱动电路模块、左右轮直流电机、超声波传感器模块、扩展插槽模块、红外及其他传感器模块、关节型机械臂机构和直流电源模块等组成。
主控器以ATmega 128嵌入式微处理器为核心,在机器人智能控制中起主导作用。超声波传感器模块用于机器人避障,利用超声波传感器采集反馈信息后,将采集信号传送给ATmega128处理器,通过嵌入式软件的计算,实现对障碍物的识别避障。同时,红外传感器模块一方面用来弥补超声波传感器模块的盲区,另一方面可以采集路面信息,收集寻迹信号,实现对黑线或白线的寻迹。无线摄像头用于图像的采集。

图1 机器人系统总设计框图
行走机构使用四轮结构,包括车身、车架以及4个车轮。其中ATmega128核心板、控制器扩展板以及驱动板等总共3层电路板固定在移动机器人的车身上。供电电源为直流12V,采用锂电充电电池。
主控器的控制软件基于AVR嵌入式开发环境,使用相关的C应用程序开发。机器人通过无线模块向PC上位机发送超声波传感器、红外传感器以及其他传感器反馈的数据,然后与无线摄像头得到的信息进行融合计算之后得到合适的决策。
2 机器人的本体结构设计
教学机器人主要由移动平台与机械手臂2大部分组成,图2为机器人的移动平台布局,由2个主动轮带动2个从动轮运动,且在底板前方及左、右两侧安装传感器,中部位置固定机械手臂。
该机器人需精确地将机械手移动到给定点,由末端夹持机构开始工作,完成抓取动作。基于此要求,整个机械手臂设计为一个具有5自由度的关节型机械手臂,各关节处皆有舵机控制,如图3所示。其中,1,2,3号关节控制机械手臂,起机械手的定位作用,1号关节连接旋转台和大臂,做原地旋转运动;2号关节连接大臂和小臂,做上下起俯运动;3号关节连接小臂和下端手腕(4,5号关节)部分,做上下起俯运动。4,5号关节模拟腕关节功能,4号关节做左右摆动,5号关节做原地旋转运动,同时连接末端夹持机构。

图2 移动平台整体布局

图3 机械臂关节
3 控制系统的硬件设计
3.1 主控制器
主控制器分为ATmega128核心电路板和附属的扩展主板两部分,核心板通过双排插针与主板进行电气连接。
3.2 超声波传感模块
超声波传感器抗干扰能力强、体积小、使用便捷、实用性强。采用超声波传感器进行避障和路径规划时使用渡越时间法可测量传播距离。超声波发生器运行时开始计时,传播时遇到障碍物会发生反射形成回波传递到接收端,停止运行并记录时间。最终超声波传感器依据记录的时间以及路径计算出障碍物的距离,确保避障及时。
3.3 红外传感器模块
红外传感器普遍采用的测量原理为三角测量原理和PSD测距法,其三角测量原理如图4所示。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会被反射回来。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在得知发射角度a、偏移值L、中心距X以及滤镜的焦距f后,传感器到物体的距离D就可以通过几何关系计算得出。
PSD测距采用SHARP的GP2Y0A02YK0F传感器模块,内置有红外LED和PSD(position sensitive detector)检测器模块,可将传感器前面放置物体的距离变换为直流电压输出。
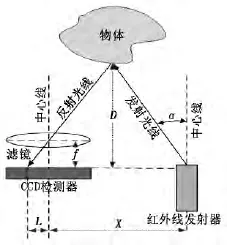
图4 三角测量原理
3.4 驱动电路
功放驱动电路采用双极H桥型的集成电路L298N,它是由SGS公司生产的高性能脉宽调制功率放大器,具有体积小、驱动能力强等特点。内部包含两个H桥高电压大电流桥式驱动器,单片即可实现电机全桥动,可驱动46V、2A以下的电机。
3.5 电源电路
机器人运行时不需交流电源,采用1组锂电池供电,电压约12V。除舵机和传感器供电需要电源模块直接供电之外,电源模块还须给控制器及控制器的外围设备供电,因此必须对电压进行转换。由于本设计中所用的大部分芯片的工作电压是5V,因此采用电压转换芯片LM7805将12V的电源电压转换成5V。另外,如果舵机同时工作,电流较大,为增大稳压模块的最大负载电流,本设计将5个LM7805并联后负责给舵机及舵机驱动板供电,一个LM7805给最小系统板和直流电机驱动板供电。
通过对教学机器人的设计、制作、组装、测试和运行,机器人能通过避障方式稳定行驶,并且能准确抓取目标。教学机器人实物图如图5所示。

图5 教学机器人实物图
4 结语
本文设计的移动教学机器人通过最后的实验实现了避障、巡线、抓取等功能,证实了方案的可行性和合理性,并且在之后的大学生机器人兴趣小组上进行了详实的教学,极大地提高了学生对于机械、电子和自动控制等多门机器人相关课程的认识及动手能力。
[1]梁明亮,赵成.基于嵌入式技术的四轮驱动教育机器人设计[J].实验室技术与管理,2012,29(11):82-86.
[2]陈义平,时颖,袁明明.多功能教学用机器人的设计与实现[J].实验室研究与探索,2013,32(2):84-87.
[3]肖晓萍,廖青,李自胜.基于机器人实验教学平台的研制[J].机电产品开发与创新,2008,21(4):19-21.
[4]卢伟宏,王海波,孟庆鑫.一种教学机器人控制系统研发[J].吉林化工学院学报,2009,26(4):65-69.
[5]许立成.在计算机教学中引入智能机器人教学平台的研究[J].电脑与信息,2011(5):222-223.
