基于GT400-SG运动控制卡的数控实验平台系统的研究
2014-12-31谭肖
谭 肖
(湘潭大学 信息工程学院,湖南 湘潭 411105)
0 引言
由于对数控加工多样化要求的不断提高,对加工的专业化要求也越来越高[1,2],如何有效地利用PC机强大的运算能力、简洁的人机界面成为数控系统发展的重要问题。当前的PC机与数控系统结合主要有两种方法:一种是通过简单的I/O模块组成简易的数控系统,此系统成本低,但在程序编写的问题上较为复杂;另一种是通过控制器控制并行的双CPU上、下位机组成的数控系统,此模式具有很大的编程灵活性,便于用户自主开发[3,4]。本文运用固高GT400-SG运动控制卡建立开放式数控系统并与XY实验平台连接,构成一个开发周期短、运行速度快、控制精度高、价格低廉的开放式数控实验平台。
1 系统硬件结构
1.1 总体系统结构
基于GT400-SG的开放式数控系统的总体结构图见图1。由图1可以看出,基于控制卡的开放式数控系统主要是利用PC机的人机界面,通过PCI连接运动控制卡,控制驱动器驱动步进电机,从而达到控制数控机床的目的[5]。
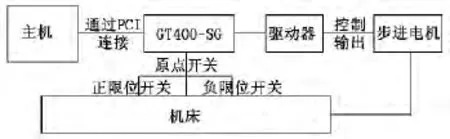
图1 基于GT400-SG的开放式数控系统
1.2 GT400-SG运动控制器
GT400-SG运动控制器主要由DSP、FPGA和PCI桥构成,由于PCI设备为即插即用设备,因此不需要基地址选择跳线和中断选择跳线。GT400-SG运动控制器需与接口端子板配合使用,通过转接板与PC连接。图2为运动控制器与接口端子板连接图。

图2 运动控制器与接口端子板连接示意图
2 运动控制器的工作原理
2.1 控制轴的定义
GT400-SG运动控制器具有4个步进电机控制通道,可同时控制4个步进电机进行运动,我们将这4个控制通道简称为4个控制轴。
2.2 运动控制命令和库函数
GT400-SG运动控制器提供C语言函数库以及动态链接库,完成上、下位机的通讯,以此来驱动运动控制器工作。用户可以在上位机(主机)中调用相应的库函数,发出运动控制命令,完成轨迹规划、采样刷新等复杂运算和操作,并转换为运动脉冲信号控制电机运动。
运动控制器命令分成3类:面向控制轴的命令、面向坐标系的命令和其他命令。控制轴根据主机的要求设置成5种不同的运动模式:S曲线模式、梯形曲线模式、速度控制模式、电子齿轮模式和坐标运动模式。
停止运动的方式主要有急停方式和平滑停止方式。这两种不同的方式是通过两个不同的主机命令GT_AbptStp()和GT_SmthStp()来实现的。GT_AbptStp()命 令 控 制 轴 的 速 度 设 为0。而GT_SmthStp()命令控制轴的运动平滑停止,此时,设定一个加速度进行减速直至速度为0,减速过程与加速过程对称。
主机需要对各控制轴设置不同的运动模式和控制参数来控制其运动。GT400-SG运动控制器采用双缓冲机制来完成参数的设置和更新。为实现控制轴多个参数的更新以及多个控制轴参数的同步更新,GT400-SG控制器把控制轴参数和相关的控制命令下载到运动控制器的储存器中;当上位机(主机)发出刷新命令时,控制器将在下一个采样周期将这些参数和命令复制到有效寄存器中,使其生效。这种由刷新命令控制的双缓冲机制有效地减小了数据更新时程序报错的概率。
3 运动控制
3.1 加减速控制
加、减速控制是运动控制系统插补器的重要组成部分,是运动控制系统开发的关键技术之一。常见的加、减速控制方式有直线加减速(T曲线加减速)、三角函数加减速、指数加减速和S曲线加减速等。其中,在运动控制中应用最广泛的为直线加减速和S曲线加减速算法。下面运用GT400-SG运动控制器下的XY平台针对S曲线加减速和T曲线加减速进行实验。
图3为对S曲线加减速的参数设置,图4为T曲线加减速运动的参数设置,图5为S曲线加减速的位移、速度以及加速度的曲线变化图,图6为T曲线的位移、速度、加速度曲线图。

图3 S曲线加减速运动的参数设置
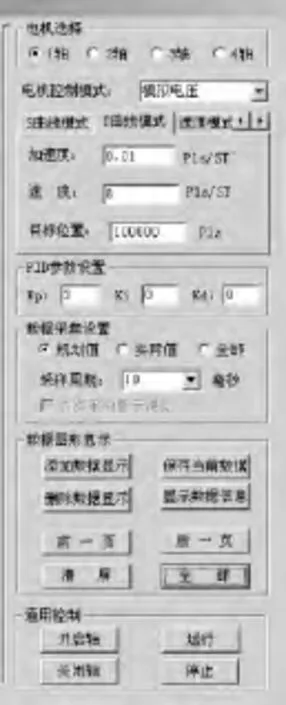
图4 T曲线加减速运动的 参数设置图
3.2 电子齿轮
电子齿轮模式实际上是一个多轴联动模式,其运动效果与两个机械齿轮的啮合运动类似。电子齿轮可以实现多个运动轴按设定的齿轮比同步运动。另外,电子齿轮功能还可以实现一个运动轴以齿轮比跟随一个函数,而这个函数由其他的几个运动轴的运动决定;一个轴也可以以设定的比例跟随其他两个轴的合成速度。

图5 S曲线加减速曲线变化图
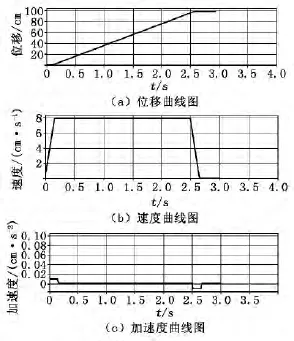
图6 T曲线加减速变化曲线图
当前轴工作在电子齿轮模式下时,主要需设置一个参数,即电子齿轮减速比,其范围为-16 384~16 384,当前轴会按照设定的速度比值跟随主动轴运动。电子齿轮模式下的参数设置见图7。

图7 电子齿轮模式下的参数设置
随后对主动轴进行S曲线或T曲线的运动模式设置(与上述的T曲线和S曲线运动设置相同),开启轴后,进行运行,得出从动轴的运动位移、速度和加速度曲线,如图8所示。

图8 电子齿轮模式下的从动轴运动曲线图
4 结束语
本文利用固高GT400-SG运动控制器构筑了一个上下位机形式的开放式数控平台,并对该数控平台的运动控制做出了实验测试,完成了加减速等运动控制。整个数控平台采用功能强大的运动控制卡完成插补计算、位置控制、速度控制等实时任务,以PC机实现友好的人机界面、灵活的系统配置、增强的外部软件接口,为今后的精密加工实验提供了科学的实验平台。
[1]郑玉林.基于运动控制卡的开放式数控系统的研究[D].武汉:武汉工业学院,2007:32-34.
[2]张剑,殷苏民.基于运动控制卡的开放式数控系统研制[J].机床与液压,2003(3):214-217.
[3]席典刚,晏群,刘思胜.基于PC+I/O软件化开放式数控系统框架研究[J].机床与液压,2011,39(10):78-82.
[4]占小猛,杨林,任仲伟.基于DMC运动控制卡的开放式数控系统研究[J].机械制造与自动化,2011(2):126-130.
[5]MA Xiong-bo,HAN Zhen-yu,WANG Yong-zhang,et al.Development of a PC-based open architecture software-CNC system[J].Chinese Journal of Aeronautics,2007,20(3):341-346.
