基于键合图理论的主动油气悬架仿真研究
2014-12-31洪展鹏王丛岭
洪展鹏,王丛岭
(电子科技大学 机械电子工程学院,四川 成都 611731)
0 引言
车辆悬架直接影响着汽车行驶平顺性和操纵稳定性。主动悬架一般都涉及到多个能量域(液压、电磁流变液等),用传统的建模与分析方法(如微分方程法)会十分复杂繁琐,也不利于整车模型的分析。键合图理论的发展[1],为整车动力学分析提供了有效的手段,也利于不同汽车子模块的耦合分析,现今不少用于整车仿真的软件也是基于键合图的原理实现的。
本文将使用键合图语言构建1/4主动油气悬架(AHP)的模型,推导其状态方程,并利用MATLAB仿真分析悬架的相关性能。
1 1/4主动油气悬架(AHP)
典型的1/4主动油气悬架振动模型如图1所示,由电磁阀驱动控制,油液作为介质压缩气室中的惰性气体,实现刚度特性,采用管路中的小孔节流实现阻尼特性[2]。
图1的振动模型主要考察的是在垂直方向上的运动特性(减振效果)。在垂直方向上的3个位移量zr,zus,zs分别表示路面不平的输入、非簧载质量的运动和簧载质量的运动;轮胎模型在垂直方向简化为弹簧kt及非簧载质量mus;车架等悬挂在悬架上的质量统一为簧载质量ms;控制器采集车身的加速度a产生控制电流is控制电磁阀的动作,使之产生通往液压缸(液压缸内压力pc)的油液流量Qv;电磁阀的具体控制是将高压泵产生的高压(psys)油液压入液压缸(此时is>0)或者使液压缸的油液回流油箱(油箱内压力pres即为外界大气压,此时is<0);储能器的作用是产生弹力效果,气室内(氮气)压力与体积分别为ps和Vs,液压缸经由节流阻尼Rd(通过流量Qs)连接储能器。

图1 1/4主动油气悬架振动模型
2 油气悬架的键合图模型
在不影响模型正确性的前提下,对油气悬架作如下假设和规定:所有管路都是刚性的,且系统没有泄漏;储能器(气室)中的油液压力与气体压力处处相等,在动态条件下没有热交换[3];伺服阀动态特性并入控制系统作为控制的一部分;规定能量的方向为满足压缩为正。
2.1 键合图模型
根据前述的振动模型和假设规定,建立含有信号键的主动油气悬架混合键合图模型,如图2所示。在图2中,根据标准化的规定,阻性元件、容性元件以及惯性元件分别用R,C,I这些符号表示。转换器TF通过液压缸的活塞(面积Ac)将机械能中的力与速度分别转换为液压能量中的压力与流量。图2的键合图模型在每个键合图元的旁边均标出了键合图元与图1对应的物理振动模型参量之间的对应关系。

图2 主动油气悬架混合键合图
表1给出了在键合图中计算所用的符号与传统物理变量符号之间的对应关系,以便后续方程的使用与计算。
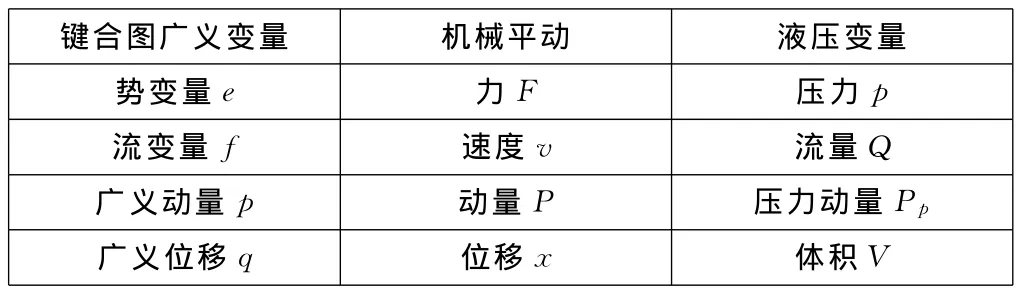
表1 键合图符号与传统物理符号的关系
对于储能器的特性,由于不是线性的,所以不需要确定其容度参数,但是作为容性元件在键合图中表示[4]。
2.2 状态方程
在键合图模型中,含有3个容性元件C2,C14和C18,分别对应于物理参量表示轮胎刚度、油液压缩率和气囊弹性容度;2个惯性元件I4和I8分别表示非簧载质量和簧载质量。确定1/4主动油气悬架的状态变量为:

输入源变量如下:

首先确定各储能元件和阻性元件的特性,即:

活塞与液压缸壁之间的摩擦使用非线性模型[5],从而阻性元件R11的非线性关系为(其值取负值):

Fc,Fm,k1,k2确定了非线性摩擦模型的静摩擦与动摩擦的组合方程的参数;dv为存在相对速度时动摩擦的速度影响系数。
对于气囊,在动态条件下,惰性气体通常没有足够的时间与外界环境交换更多的热,由压力—容积的等熵定律pVγ=p0(γ是在固定压力和体积条件下特定的热度比值,p和V是气体的瞬时压力和体积,p0与V0是初始时刻的压力和体积),可以得到非线性容性元件C18的关系式:

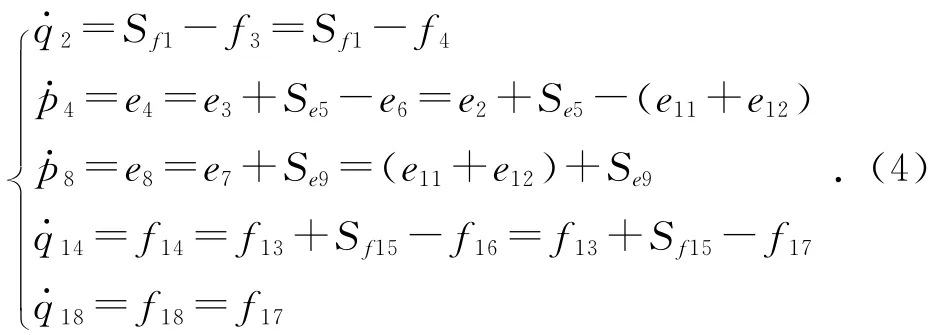
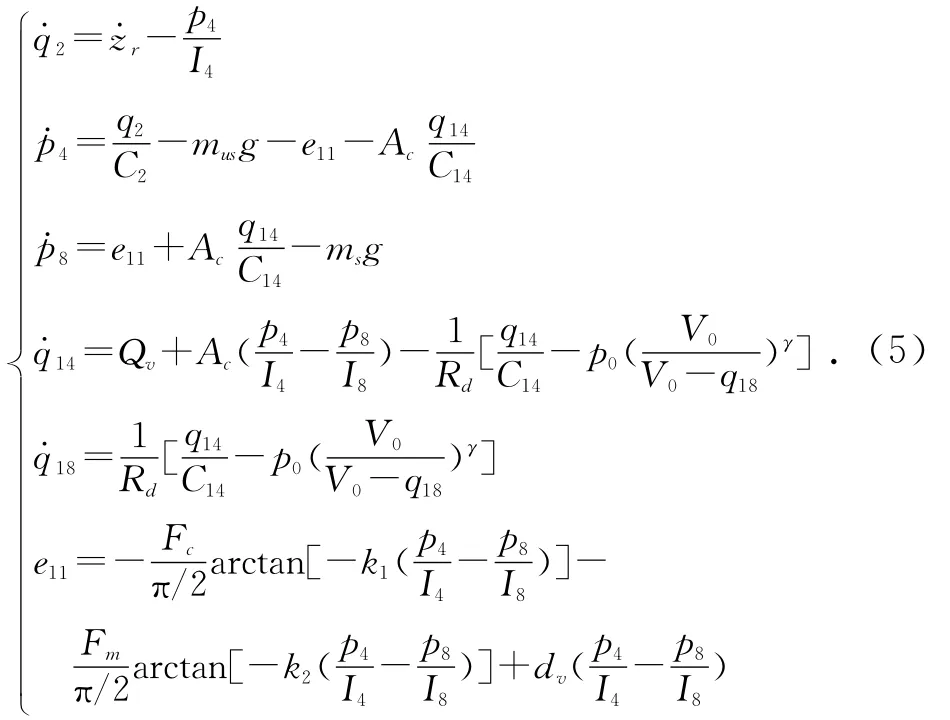
将输入源U及式(1)、(2)和(3)代入式(4)最终得到微分方程与代数方程混合形式的非线性油气悬架系统的状态方程如下:
2.3 参数及初始状态
表2给出了系统主要物理参数,以及计算所需的物理常量,包括重力加速度g、液压油体积模量E、液压缸油液未受到压力时的自然体积Vc0。

表2 系统主要物理参数
根据表2的参数,由于油液的压缩率极小,油液的体积液容可由油液的体积模量线性化得到[6]:

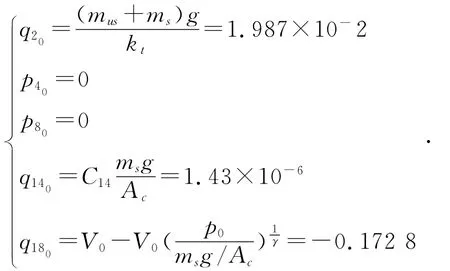
初始状态由车辆静止时的状态决定,此时轮胎、油液、储能器下室均受到来自车重的影响,因此初始状态计算需要根据车辆静平衡计算得到,即:
3 控制仿真
汽车悬架性能指标主要有车身加速度、悬架动挠度以及车轮动载荷。在这3个性能指标中最能反映车身振动特性的是车身加速度。图2的键合图中控制器就是以车身加速度来进行控制的。
控制器的控制规则(将伺服阀的动态特性包含到控制器中)如下:

其中:e为PID的控制输入,也是偏差值;ad为期望的车身加速度;kp,ki分别是控制的比例系数、积分系数。方程(6)即是PI的控制方程。
根据前述假设,定义伺服阀的流量与压力差的平方根成正比,伺服阀流量特性如式(7)所示:

其中:kv为伺服阀的增益。控制参数见表3。
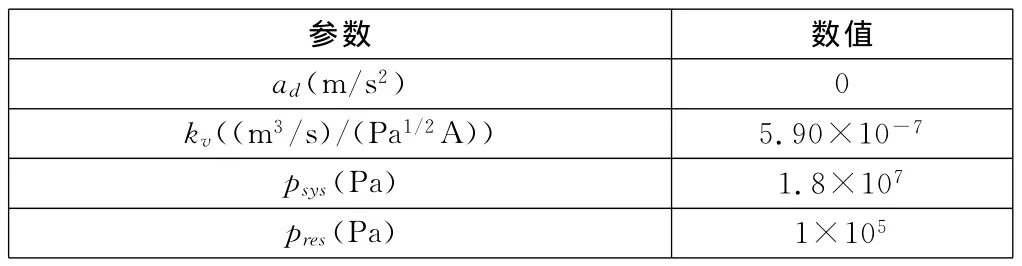
表3 控制参数
本文路面激励使用白噪声干扰模型,这也是描述路面形态最常用的模型[7]。用时域内速度功率谱密度Gq·(f)描述路面不平度的统计特性:

式中,参考空间频率n0=0.1m-1;路面不平度系数Gq(n0)=128×10-6m2/m-1,相当于B级路面上限,C级路面下限;v是车速。则实际路面轮廓可由白噪声通过积分器产生,即:

其中:w(t)为零均值单位白噪声。
图3为路面随机激励(车速30m/s),图4为被动与主动悬架车身加速度对比。可看出在图3的路面随机激励下,由于伺服阀的主动控制,车身加速度相比被动悬架得到了很好的抑制作用。
为了更好地显示车辆受到路面冲击时电磁阀的动作情况,做如下仿真,输入的冲击路面信息如图5所示(车速以15m/s过障)。图6为冲击路面下车身加速度。
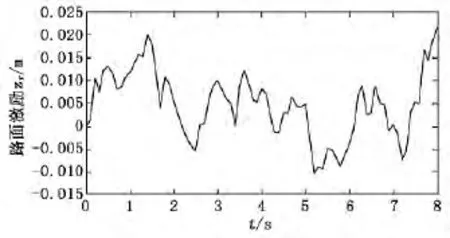
图3 路面随机激励(车速30m/s)

图4 被动与主动悬架车身加速度

图5 冲击路面信息
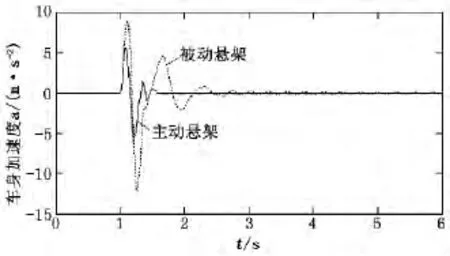
图6 冲击路面下车身加速度
可以清晰地看出,在车辆受到路面冲击的时候,主动油气悬架提高了车身的稳定性,减少了车身的振动。
4 结论
本文根据键合图模型详细推导了具有非线性特性的油气悬架状态方程,通过MATLAB的数值仿真,直观体现了主动控制油气悬架能明显降低车身加速度,提高了车辆舒适性。
[1]危淑平.基于键合图法的多领域系统建模与仿真[D].兰州:西北师范大学,2012:5-9.
[2]史文库.现代汽车新技术[M].北京:国防工业出版社,2011.
[3]庄德军.主动油气悬架车辆垂向与侧向动力学性能研究[D].上海:上海交通大学,2006:3-8.
[4]Dean C Karnopp.System Dynamics——Modeling and Simulation of Mechatronic Systems)[M].刘玉庆,译.北京:国防工业出版社,2012.
[5]Knorn F.Modeling and control of active hydro-pneumatic suspension[R]. [s.l.]:Daimler Chrysler Research&Technology and Otto-von-Guericke-Universitat Magdeburg,2006:9-17.
[6]王中双.键合图及其在系统动力学中的应用[M].哈尔滨:哈尔滨工程大学出版社,2007.
[7]徐丽娟.汽车主动悬架振动控制方法的研究与效果分析[D].哈尔滨:哈尔滨工程大学,2010:14-17.
